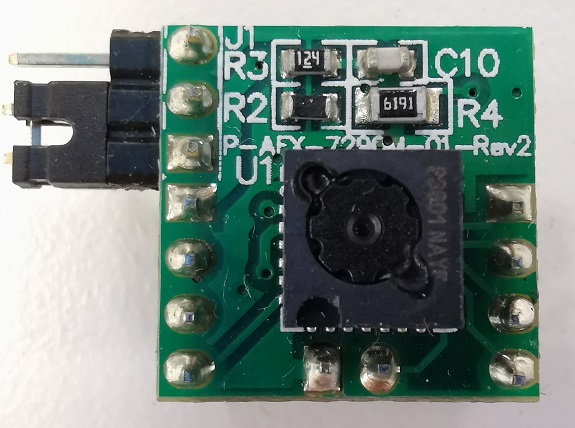
無人機穩定機制 PMW3901是一種光流感測器,用於計算內部流量變化,並提供每個針幀之間的像素差異,原理類似我們常使用的滑鼠原理一樣,但需要在高度80 mm以上到無限大之間的操作範圍。 原相的光學動態追蹤(Optical Motion Tracking / OMT)技術可提供無人機應用中的長距離
STEVAL-FCU001V1可實現四軸無人飛行器設計, 完整的範例程式使設計人員很快開始測試中小型四軸(有刷或無刷直流電機),無人飛行器並在真實飛行條件下評估傳感器的性能。可以通過標準外部遙控器(PWM輸入接口)控制,也可以通過智能手機或平板電腦控制板載藍牙低功耗模塊(CE,FCC,ARIB,BQ
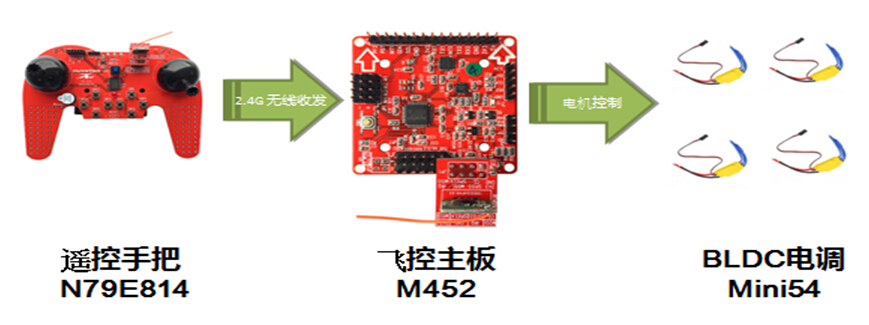
四軸飛行器是一種利用四個旋翼作為飛行引擎來進行空中飛行的飛行器,進入20世紀以來,電子技術飛速發展四軸飛行器開始走向小型化,並融入了人工智慧,使其發展趨於無人機,智慧型機器人。四軸飛行器不但實現了直升機的垂直升降的飛行性能,同時也在一定程度上降低了飛行器機械結構的設計難度。四軸飛行器的平衡控制系統由
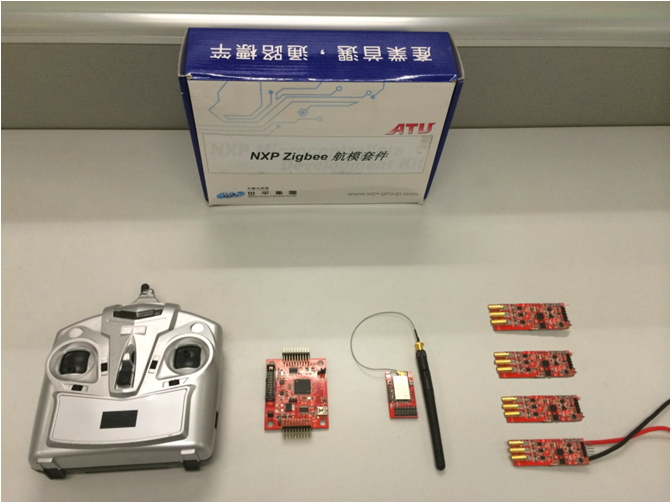
四軸飛行器是一種有四個螺旋槳且螺旋槳呈十字形佈局的小型飛行器,屬於多旋翼飛行器中最基本的一種。四軸飛行器具有可靠的穩定性,在複雜、危險的環境下可完成特定的飛行任務。它的應用十分廣泛,可用於救援物資投放、航拍,橋樑檢測,定點巡航等應用,具有不可估量的市場潛力。 ATSAM4S16-AU 屬於 Atme
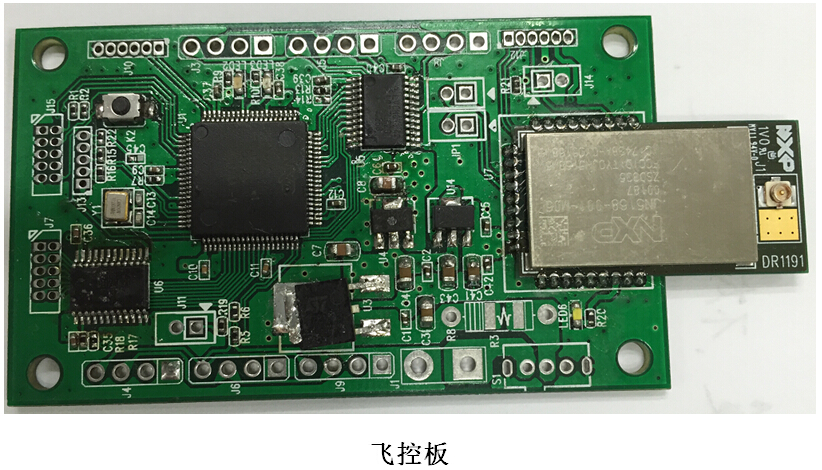
四軸飛行器是一種有四個螺旋槳且螺旋槳呈十字形佈局的小型飛行器,屬於多旋翼飛行器中最基本的一種。四軸飛行器具有可靠的穩定性,在複雜、危險的環境下可完成特定的飛行任務。它的應用十分廣泛,可用於救援物資投放、航拍,橋樑檢測,定點巡航等應用,具有不可估量的市場潛力。 四軸飛行器的飛控 MCU 由於需要處
隨著科技的發展,無人機技術越來越被重視,並且相對于固定翼無人機,多軸飛行器有著諸多優點:如動力分佈,機體品質分佈對稱,水平面積大,在調整傾角時不會產生平移。 四軸結構決定它能以自身質心為原點,在任意軸旋轉,可以實現上升、下降、左旋、右旋、前進、後退、左偏、右偏、懸浮等高難度動作。由於水準結構面積
為提供您更多優質的內容,本網站使用 cookies 分析技術。若繼續閱覽本網站內容,即表示您同意我們使用 cookies,若不同意請關閉瀏覽器的 cookie 功能,關於更多資訊請閱讀 Cookie 政策平台服務條款