

一、簡介
大聯大世平集團因應現今 ADAS 中最火熱的 前方防撞系統 (Forward Collision Warning, FCW) 與 車道偏移系統(Lane Departure Warning, LDW),提供一套 Sky Eye 雙目立體視覺 ADAS 方案。本文將逐步帶您完成 Sky Eye BSP 的環境架設、編譯與燒錄。
二、硬體需求
DVK2022_NXP SKY EYE EVM,可於大大購上下單
https://www.wpgdadago.com/ProductList?do=query&queryMap.RESULT=Y&queryMap.InStock=N&queryMap.CurrentCurr=N&queryMap.M_PARTNO=DVK2022_NXP%20SKY%20EYE%20EVM
三、軟體需求
1. Ubuntu 16.04 64-bit
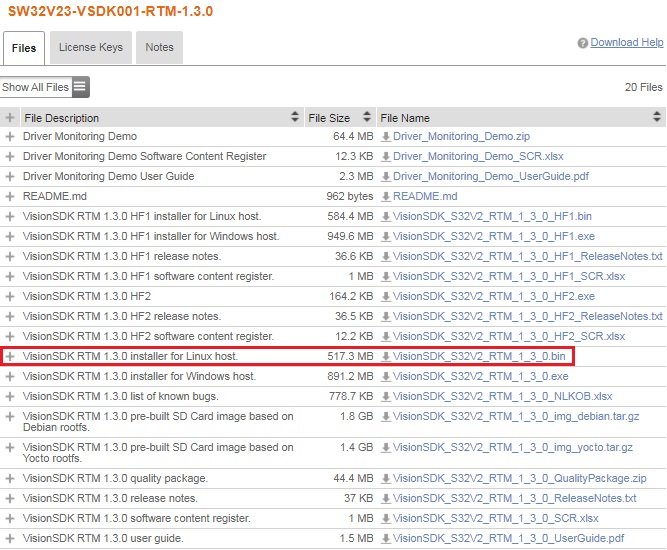
2. NXP VSDK 1.3.0
https://nxp.flexnetoperations.com/control/frse/download?agree=Accept&element=10595057
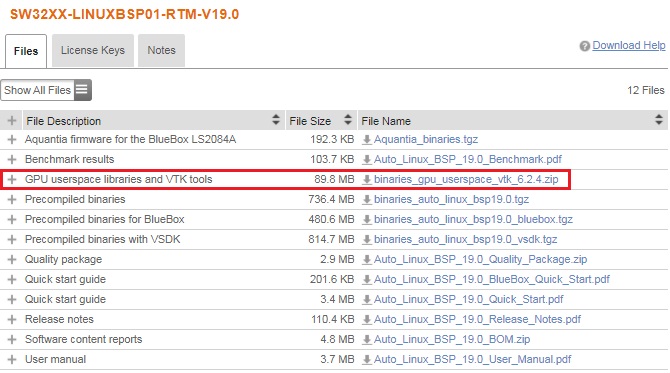
3. NXP Vivante GPU Package
https://nxp.flexnetoperations.com/control/frse/download?agree=Accept&element=10553047
4. Java JDK 8u191 Linux x86
https://www.oracle.com/tw/java/technologies/javase/javase8-archive-downloads.html
5. WPI SKY EYE Tool
請洽詢 WPI 窗口取得
四、執行 WPI SKY EYE Tool
1. 將NXP VSDK 1.3 / NXP Vivante GPU Package / Java JDK 8u191 與 WPI SKY EYE Tool 放入同一個路徑下
2. 第一次執行 WPI SKY EYE Tool
1) Tool 會安裝所需的 Ubuntu 套件
2) 請輸入姓名及郵件信箱設定 git 設定
3) Tool 會將 Java 8u191 安裝於 /usr/java 路徑下,並設定環境變數
4) Tool 會安裝 NXP VSDK 1.3 於當前目錄下,並安裝 ffmpeg 與 OpenCV
5) Tool 會設定 Yocto 的工作目錄,預設為當前目錄下的 fsl-auto-yocto-bsp19
6) Tool 會安裝 NXP Vivante GPU Package,請閱讀 Software Agreement 並輸入 “y”
7) Tool 會創建編譯工作目錄,請閱讀 Software Agreement 並輸入 “y”
3. WPI SKY EYE Tool 主目錄
1) U-Boot list tasks – 列出 U-Boot 可以執行的任務清單
2) Kernel list tasks – 列出 Kernel 可以執行的任務清單
3) fsl-image-auto list task – 列出 fsl-image-auto 可以執行的任務清單
4) U-Boot menuconfig – 開啟 U-Boot 的 menuconfig
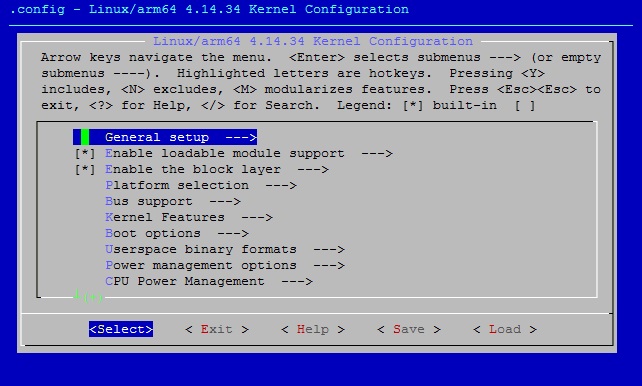
5) Kernel menuconfig – 開啟 Kernel 的 menuconfig
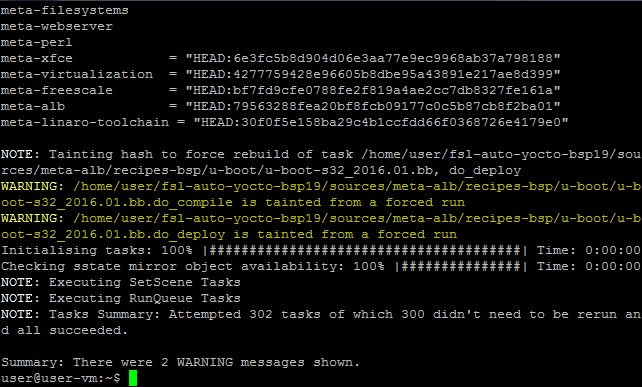
6) Buils/Deploy U-Boot – 編譯 U-Boot
大聯大世平集團因應現今 ADAS 中最火熱的 前方防撞系統 (Forward Collision Warning, FCW) 與 車道偏移系統(Lane Departure Warning, LDW),提供一套 Sky Eye 雙目立體視覺 ADAS 方案。本文將逐步帶您完成 Sky Eye BSP 的環境架設、編譯與燒錄。
二、硬體需求
DVK2022_NXP SKY EYE EVM,可於大大購上下單
https://www.wpgdadago.com/ProductList?do=query&queryMap.RESULT=Y&queryMap.InStock=N&queryMap.CurrentCurr=N&queryMap.M_PARTNO=DVK2022_NXP%20SKY%20EYE%20EVM
 |
三、軟體需求
1. Ubuntu 16.04 64-bit
2. NXP VSDK 1.3.0
https://nxp.flexnetoperations.com/control/frse/download?agree=Accept&element=10595057
 |
https://nxp.flexnetoperations.com/control/frse/download?agree=Accept&element=10553047
 |
https://www.oracle.com/tw/java/technologies/javase/javase8-archive-downloads.html
5. WPI SKY EYE Tool
請洽詢 WPI 窗口取得
四、執行 WPI SKY EYE Tool
1. 將NXP VSDK 1.3 / NXP Vivante GPU Package / Java JDK 8u191 與 WPI SKY EYE Tool 放入同一個路徑下
$ ls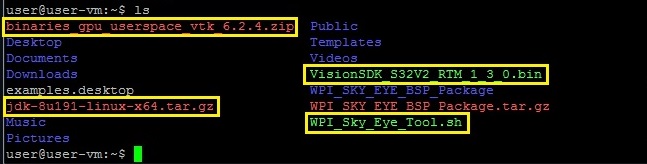 |
| $ ./WPI_Sky_Eye_Tool.sh |
 |
 |
 |
 |
 |
 |
 |
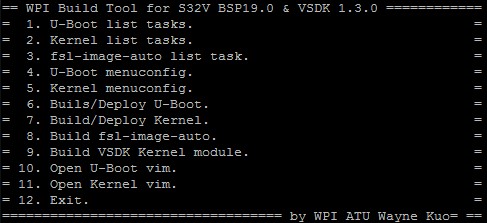 |
2) Kernel list tasks – 列出 Kernel 可以執行的任務清單
3) fsl-image-auto list task – 列出 fsl-image-auto 可以執行的任務清單
4) U-Boot menuconfig – 開啟 U-Boot 的 menuconfig
| $ cd ../build/s32v234evb_config/ $ make menuconfig  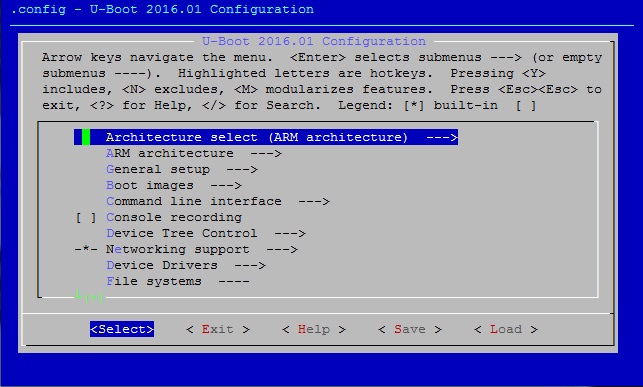 |
 |
 |
 |
9) Build VSDK Kernel module – 編譯 VSDK 中所需的 Kenek module,並放入 s32v_lib_temp/ 路徑下
$ ls s32v_lib_temp/ |
11) Open Kernel vim – 製作 Kernel 搜尋資料庫並開啟 vim
12) Exit – 離開 WPI SKY EYE Tool
五、燒錄 SD 卡
1. 確認 SD Card 裝置
$ ls /dev/sd* |
| $ cd ~/fsl-auto-yocto-bsp19/build_s32v234evb/tmp/deploy/images/s32v234evb |
$ sudo dd if=fsl-image-auto-s32v234evb.sdcard of=/dev/sdX bs=1M && sync |
$ udisksctl mount -b /dev/sdb1 && udisksctl mount -b /dev/sdb2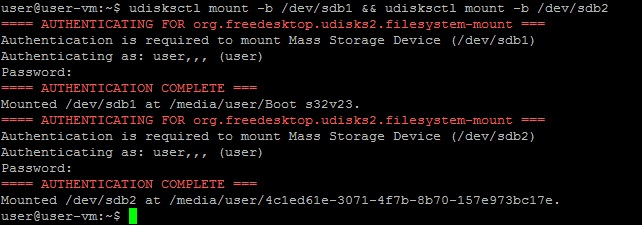 |
| $ su root |
7. 在 rootfs 路徑下創建 s32v234 路徑並進入
| # mkdir s32v234 # cd s32v234  |
| # cp ~/s32v_lib_temp/* . # ls  |
# vim etc/init.d/rcS |
| insmod /s32v234/ insmod /s32v234/apex.ko insmod /s32v234/viulite.ko insmod /s32v234/jpegdcd.ko insmod /s32v234/h264dcd.ko insmod /s32v234/oal_cam.ko insmod /s32v234/csi.ko insmod /s32v234/cam.ko insmod /s32v234/seq.ko insmod /s32v234/fdma.ko insmod /s32v234/h264enc.ko 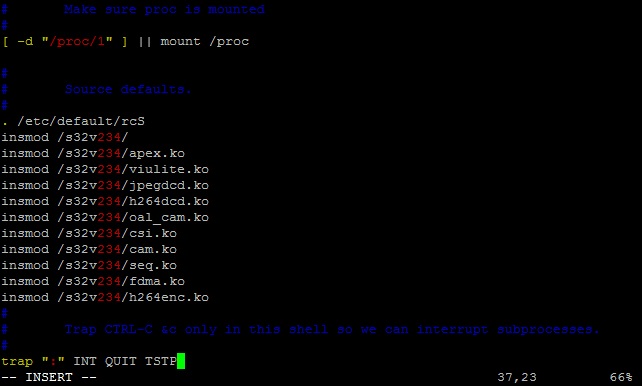 |
| # cp /home/user/s32v_lib_tmp/* . |
六、 參考文獻
1. NXP Auto_Linux_BSP_19.0_User_Manual.pdf
2. 大大通 - S32V Yocto BSP19 + VSDK1.3.0 環境搭建與編譯 (上)
https://www.wpgdadatong.com/blog/detail?BID=B0050
3. 大大通 - S32V Yocto BSP19 + VSDK1.3.0 環境搭建與編譯 (中)
https://www.wpgdadatong.com/blog/detail?BID=B0052
4. 大大通 - S32V Yocto BSP19 + VSDK1.3.0 環境搭建與編譯 (下)
https://www.wpgdadatong.com/blog/detail?BID=B0053

評論