

自動駕駛分級(Levels of Autonomous Driving)
是由汽車工程師學會(SAE Society of Automotive Engineers)定義,從安全示警、輔助駕駛,最後到由車輛完全自主自動化駕駛。目前 SAE 採用J3016 標準(J3016 Levels of Automated Driving)定義了六個等級,如<圖一>所示,說明汽車的演進將自動化到什麼程度。J3016標准定義了六個級別的駕駛自動化,從 SAE Level Zero(無自動化)到 SAE Level 5(全車自動化)。它也是目前引用最多的自動化駕駛車輛基準。
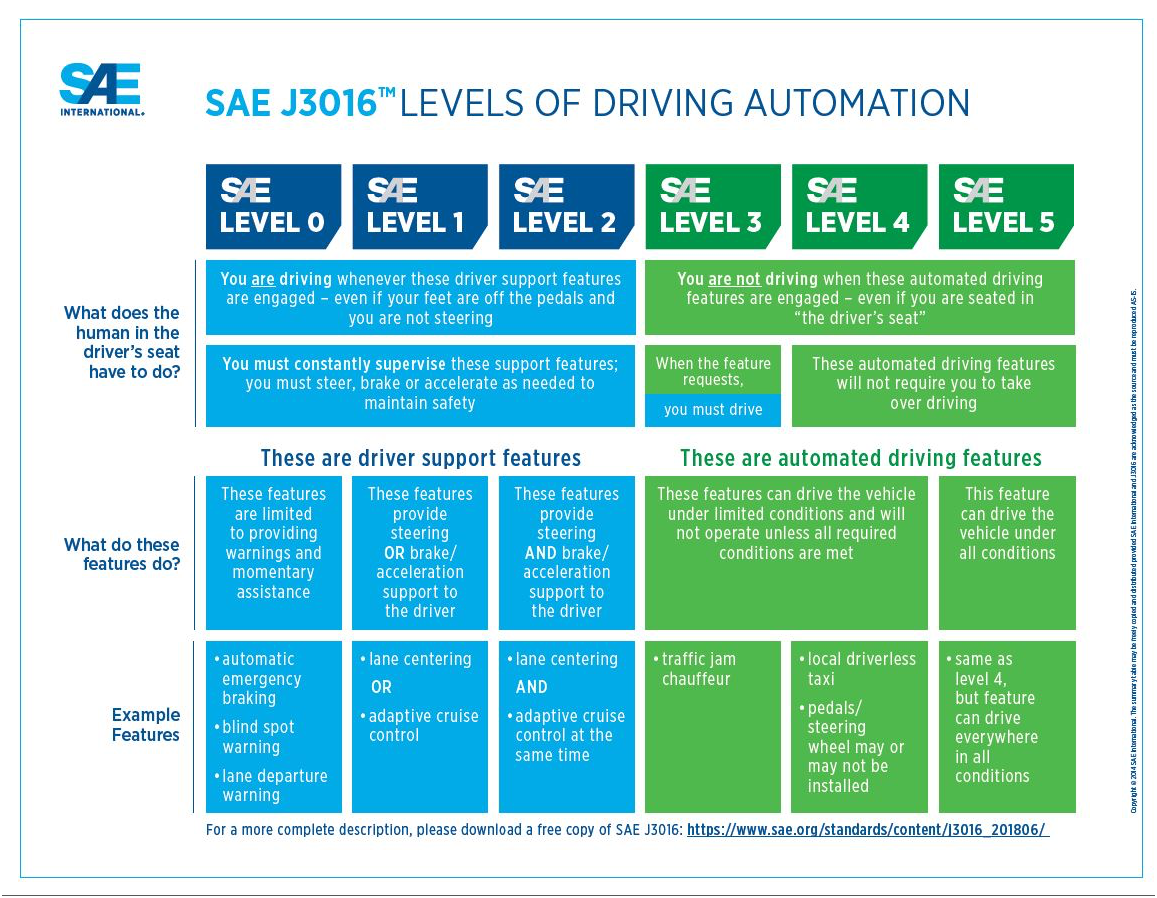 <圖一>資料來源:SAE https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic |
- SAE 等級 0(SAE Level 0):
完全由駕駛人操作,沒有自動功能,駕駛人必須負責控制車輛的所有功能,可能有基本的警示裝置,例如:自動緊急煞車 (AEB)、盲點偵測 (BSD)、車道偏移 (LDW) 等,可以協助駕駛人控制車輛,但沒有任何自動控制的功能。
- SAE 等級 1(SAE Level 1):
具有一種或多種的自動控制功能,但只能單獨作用,例如:車道維持(LKA)、主動式巡航定速(ACC) 等。
- SAE 等級 2(SAE Level 2):
具有多種自動控制功能,可以同時作用,例如:車道維持(LKA)、主動式巡航定速(ACC)、自動緊急煞車 (AEB),替代駕駛人處理外在行車環境的變化,減輕駕駛人的負擔。但駕駛人仍需注意行車環境,隨時有可能需要自行介入車輛控制。
- SAE 等級 3(SAE Level 3):
車輛可以完成部分自動駕駛任務,可以有限度的監控行車環境,例如:塞車司機功能,讓車輛接手自動跟車、車道維持、停止車輛、停後重啟等功能。當車輛偵測到需要駕駛人時會立即示警提示,讓駕駛人接手系統無力處理的行車狀況。算是無人駕駛車的開始階段。
- SAE 等級 4(SAE Level 4):
在一定條件下,車輛可以自動完成所有駕駛和監控行車環境,當自動駕駛功能開啟時,駕駛人不需要介入,但自動駕駛僅限於特定道路上使用,例如:高速公路、封閉式高架道路,這就是前面的在一定條件下的自動駕駛。
- SAE 等級 5(SAE Level 5):
在所有條件下,車輛都可以自行駕駛。自動駕駛可以在所有道路上使用,可以執行所有與安全相關的控制功能,即使沒有人在車上也可以自動駕駛,完全自動化的車輛不再需要方向盤、油門踏板、剎車踏板、方向燈桿等,人車操作裝置。
SAE 定義了從輔助駕駛到完全自動駕駛,新世代汽車自動駕駛到什麼程度,定義了六個等級,如 <表一> 所示:
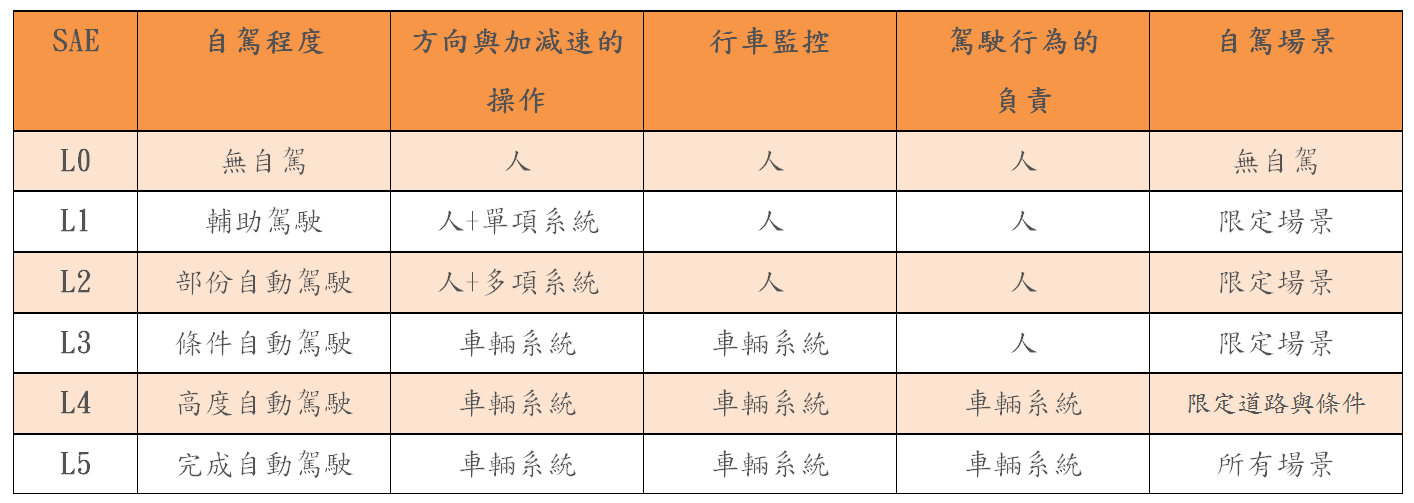 <表一> |
ADAS (Advanced Driver Assistance Systems)
先進駕駛輔助(ADAS),輔助駕駛人進行汽車控制的系統稱為 ADAS,主要功能是為駕駛人提供車輛的工作狀況,與行車環境資訊變化。在預設的情況下 ADAS 可以協助部份控制車輛,駕駛人才是控制汽車的主角,ADAS只是提示、警告、協助駕駛人的配角,讓駕駛人提早因應,避免交通意外發生。ADAS 的硬體架構,主要包括以下三個部分:環境感知、計算分析、控制執行,如<圖二>所示:
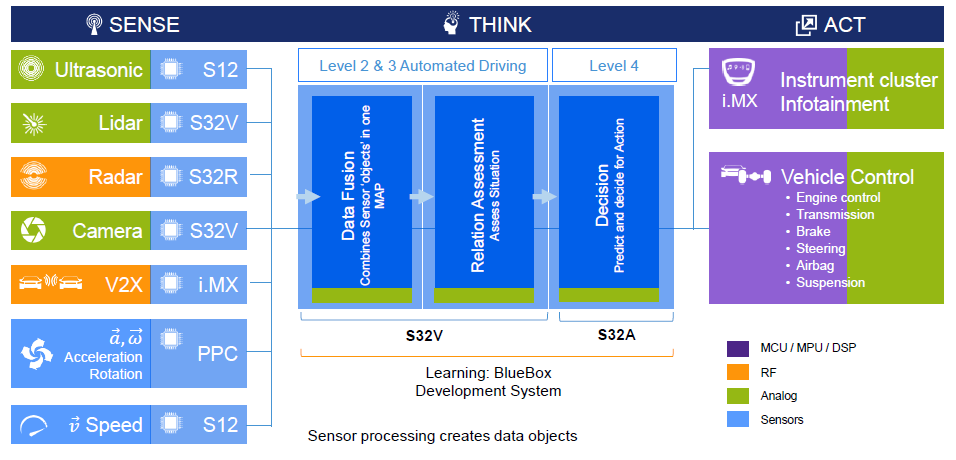 <圖二> 資料來源:NXP |
- 感測器(Sensor)處理環境感知:
偵測各種外界的訊號,ADAS 使用的感測器包括:超音波(Ultrasonic)、攝影機 (Camera)、雷達(Radar)、飛時測距(ToF)、紅外線(Infrared)、光達(Lidar)等,可以偵測物件的類型與距離都不相同,不會有單一感測器完成所有工作,未來的 ADAS 應用,皆會採用融合 (Fusion) 方式處理環境感知。
- 處理器(Processor)處理計算分析:
在車裡處理接收進來訊號的裝置,我們通稱 ECU (Electronic Control Unit),一量現代化的車輛,會有許許多數不同功能的 ECU。ADAS 的 ECU 可以收集與分析感測器傳送過來的訊號,並且做出適當的處理,再向致動器輸出控制訊號。ADAS 可以使用的處理器包括:微處理器(MPU)、數位訊號處理器(DSP),如果需要應用深度學習與人工智慧,可以使用 CNN 硬體加速器 (如 APEX),如果還要在加上大量行車影像運算,可以選用運算能力更強的圖形處理器(GPU)。
- 致動器(Actuator)處理控制執行:
控制各種致動的裝置,依據 ADAS ECU 的控制訊號,讓相關的裝置完成運作,例如:LKA 控制電子動力方向盤 (EPS) 持續修正車身位置,讓車輛維持車道置中。ACC 控制電子油門與煞車,維持車速與前車的距離。AEB 控制電子煞車使車輛停止行進。
常見的 ADAS 種類
隨著電子技術的日新月益以及成本下降,各種不同的 ADAS 被使用在現今車輛上,初期只有高階車種配備,目前則廣泛應用於注重主動安全的汽車市場,常見的 ADAS 介紹如下:
- 前車防撞示警 FCW (Forward Collision Warning) : FCW 利用攝影機或雷達感測器,偵測並利用演算法計算與前車的碰撞時間,若判斷車距過近有碰撞風險時,系統發出示警音效與閃爍燈號,提醒駕駛人減速或煞停。
 <圖三> 資料來源:NHTSA |
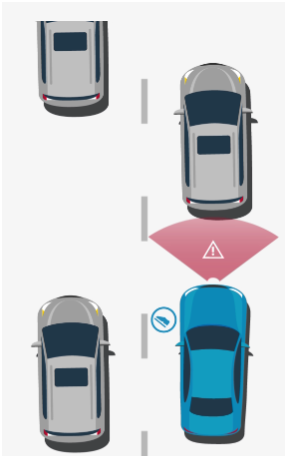
- 盲點偵測系統 BSD (Blind Spot Detection): BSD 是藉由安裝在車身上的攝影機或雷達感測器,偵測車身周遭的其他車輛,用以示警駕駛人避免車道變換時的風險。警示包含視覺 (閃光)、聽覺 (聲響)、震動 (方向盤) 等等方式。
 <圖四> 資料來源:NHTSA |
- 車道偏離示警 LDW (Lane Departure Warning) : LDW 利用安裝在前擋風玻璃上的攝影機,量測前方道路標線,實時計算車輛與車道線的相對距離等相關參數,當車輛發生偏離車道時,系統發出示警音效與閃爍燈號,提醒駕駛人修正車輛方向,避免意外發生。
 <圖五> 資料來源:NHTSA |
- 自動緊急煞車 AEB (Autonomous Emergency Brake): AEB 透過攝影機或雷達感測器,偵測前方目標車輛,再利用處理器計算碰撞風險,最後控制致動器執行自動煞車,避免意外發生。
 <圖六> 資料來源:NHTSA |
- 主動巡航控制 ACC (Adaptive Cruise Control): ACC 透過雷達、雷射或立體攝影機,偵測與前車間的距離,除了可依照駕駛者所設定速度行駛外,還會自動調節車速,保持與前方車輛的安全距離。具有主動巡航控制的車輛,被認為是 SAE L1 等級的自動駕駛汽車。
 <圖七> 資料來源:NHTSA |
- 道維持輔助 LKA (Lane Keeping Assist):LKA 透過攝影機量測前方道路標線,實時計算車輛與車道線的相對距離等相關參數,當車輛發生偏離車道時,系統會立即介入修正車輛方向,維持車輛行進於車道內。實務上 LKA 有限定工作條件,例如 VW 集團的 LKA 要在 65KM / Hr 以上的條件下,才會進行車道維持工作。 同時如果車道曲率過大時,也會要求由駕駛人接手操作。
 <圖八> 資料來源:NHTSA |
評論
Aken
2020年3月11日
Nick
2019年7月10日
kevin68
2019年7月9日
超强
2019年7月4日
农工
2019年6月29日
付永杰
2019年6月28日
丁祥
2019年6月28日
林大翔
2019年6月27日
波波
2019年6月27日
王建文
2019年6月27日