

之前已經介紹過很多關於MOSFET 的基本物理特性了,及Buck 的基本架構了,本篇會來討論關於COT 和各架構的優缺點。
Current Mode:
Current mode 是在Voltage Mode 的基礎上經過電流訊號的迴授,進而改良較Voltage Mode 較新的模式,Current Mode 有分Peak Current Mode 和 Average Current Mode,其中Peak Current Mode 較為普遍,但因為其內部的Pole 和 Zero的關係還需要外掛Type 2的補償電路,此外 Current Mode 會因為Duty Cycle >50%的關係,會有造成其不穩定的可能。
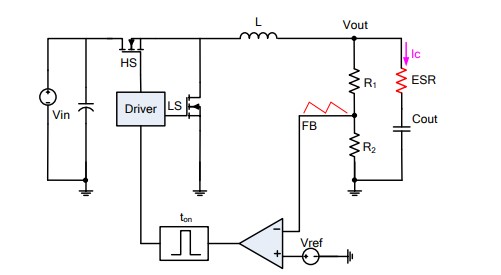
COT (Constant On Time):
如下圖COT 架構因為在補償中,最後一級的補償是比較器,而不是差動放大器,因此該比較器扮演重要的腳色,其中比較器的一端為Vfb另一端為 Vref,COT 的穩定度就會和Ripple有密切的關係,因為比較器的特性是+端大為On, 此時會進入到Ton時間H/S MOSFET 會打開一個固定的時間(Constant On Time),於COT 時間結束後,會再開L/S MOSFET,來為其Cboot Cap充電(用來開H/S MOSFET 做準備),若Ripple 過小,則會影響到比較器Off的時間,也會造成大家所說的 Jitter。
各種Buck 架構的比較:
- Voltage Mode:定頻,穩定度高,Jitter小,但沒有Vin訊號在其中,需要外掛補償電路來增加穩定性。
- Peak Current Mode:定頻,Duty Cycle <50% 穩定,可以監測到Vin 訊號,Under Shoot 反應快,但Duty Cycle 不能>50%,需要外掛補償電路來增加穩定性。
- COT Mode:變頻,可以監測到Vin 訊號,Under Shoot 反應最快,輕載效率高,但Ripple 不能過小,不需要外過補償電路。
相信大家都看到COT 優點多,尤其是AOS 的AOZ226X 系列,全系列為COT 架構,以AOZ2261為例,這顆COT 還有支援DCM Mode,在輸出穩定和省電都是業界常用的佼佼者。
Q&A時間:
Q1:COT 架構中Ripple 不能過小該如何避免?
A1:因為 delta IL* Output Cap ESR=Ripple ,故其L和ESR 就是一個很重要的腳色,不要選用過大的L,搭配上一般的MLCC 即可 。
Q2:為何COT 架構中,輕載效率會較其他人的好?
A2:因為COT 架構中,On Time 時間固定,由更動Off Time 來穩定其電壓,其頻率是可變動的,COT 架構在此之下有衍伸出DCM Mode,DCM 是 H/S L/S 接為Off,由輸出電容自然放電來穩定,藉由此機制來達成省電的效果。
Q3:COT 為何Under Shoot 反映可以最快?
A3:因為COT 架構不需要經過外部電路 Type2/3的補償,且為變頻的設計,一個Pulse 不夠就兩個概念,由此方式,就可以有最快的反應速度。
Q4:為何COT 可以檢測到 Vin 的狀況?
A4:透過Vfb所產生出的電壓,因為delta IL= Vout *(Vin-Vout) / Vin*Fsw*L,delta IL 內有Vin 訊號,固可檢測到 Vin的狀況。
Q5:在COT 架構中,會有那些Power Loss?
A5:常見的Power Loss為以下三種:
- Conduction Loss :PD=RDS x ID^2
- Switching Loss: Psw = ½ (VD x ID ) *(Tswon + Tswoff )* Fsw
- Driving Loss : ½ Ciss x Vgs^2
這三種Power Loss ,可以去觀看我之前做的文章:https://www.wpgdadatong.com/blog/detail/71439