

 前言
前言上一期的博文老吳介紹了自駕車的等級分類,相信大家對於自駕車的能力分級都有了基本的概念,可是一台車子要怎麼做到自動駕駛呢?車子怎麼知道甚麼時候要轉彎?怎麼知道要加速或是剎車呢?(難道車子裡面住了一隻小精靈?)
隨著現在科技的快速發展及 AI 演算法的進步,我們可以利用很多的技術來讓車子越來越人性,讓自動駕駛的程度越來越高,那到底有那些技術,才能一步一步提高自動駕駛等級呢?且讓老吳來說給您聽。
自駕車的感知器
首先,我們可以先想像人類是如何駕駛汽車的,駕駛人透過眼睛來知道行車的周圍環境,比方說駕駛車輛所在的車道位置,路上其他車輛或是行人的位置、障礙物、交通號誌等,也會透過後視鏡收集車輛周圍的狀況,用耳朵來確認是否有其他車輛按喇叭,有沒有消防車、救護車或是其他危險警示,駕駛人接收到這些感官的訊息後,會在腦中做出相對應的判斷,再反應給手或腳去做出因應動作,例如與前方車輛太近,需要減速,就會用腳去踩踏剎車並控制力道,或是必需要變換車道等等,簡單來說,駕駛人透過人體各感官去偵測環境資訊,大腦收集這些資料後,做出判斷並將指令送給動作器官,最後再由動作器官來操作車輛。
自駕車的駕駛動作和人為駕駛極為相似,如圖一,自駕車利用許多不同的感知器來偵測周圍環境,例如鏡頭模組、雷達、超聲波等等。鏡頭模組可來當作眼睛,透過雷達及超聲波來感知、收集車輛周圍的狀況,並將這些行車環境資訊,送到中央處理器來進行思考和做出判斷,最後將動作指令送出給油門、剎車或是方向盤等車輛控制裝置執行,利用這樣的方式來達到自動駕駛。
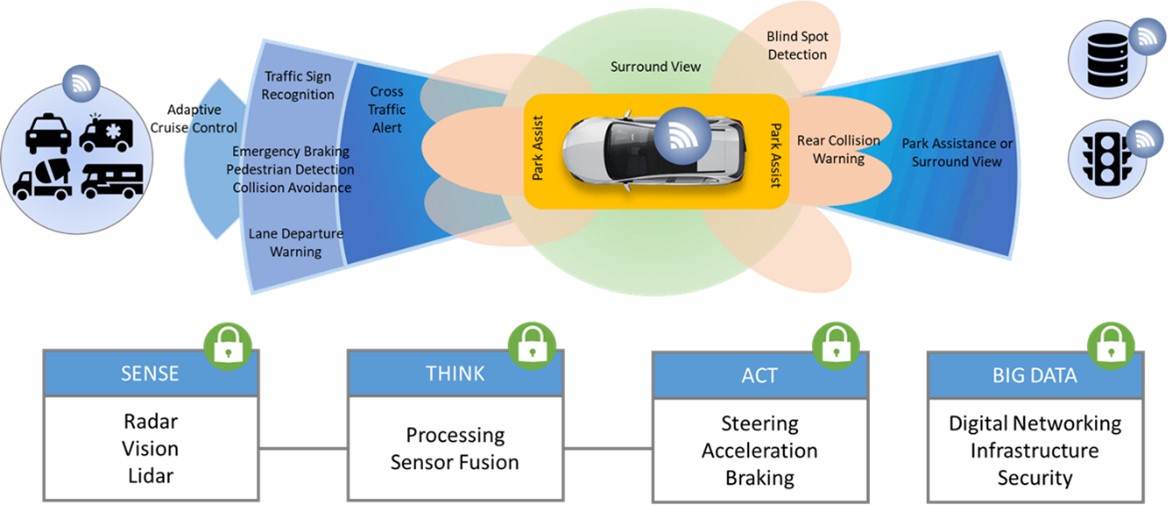
圖一、Sensors of Car
自駕車的自駕技術
之前老吳提過,達到完全自動駕駛,需要先一步一步的實現很多不同的自駕技術,擁有越多的自駕技術的車輛,他的自駕等級就越高,就像駕駛人也是要一樣一樣的學會各種駕駛技術,好比說先學會車輛前進,再學倒車,然後學習上坡起步等等,隨著經驗的累積,才能更加駕駛好車輛,那車輛需要有那些自駕技術呢?老吳一樣用人的譬喻來說給您聽。
首先,駕駛人在開車的時候,一定要知道前方的狀況和自己駕駛車輛的位置,因此車輛要能夠辨認前方的狀況。車輛可以透過辨認車道線來知道自己行駛的位置,車輛可以透過鏡頭模組的影像輸入,透過辨認車道線來了解自己的位置,將車輛控制維持在車道的中間,這就是 LKA (Lane Keeping Assist) 技術,如圖二示意。

圖二、LKA (Lane Keeping Assist)
在車輛行駛中,車輛還需要知道自己和前方、左右的車輛之間的距離,自駕車可以透過鏡頭模組或是雷達來知道自己和前方的距離,當車輛知道自己與前方車輛的距離也知道自己的車速,就可以達到主動定速 ACC (Adaptive Cruise Control) 及自動緊急剎車 AEB (Autonomous Emergency Braking) 技術,如圖三。而當車輛可以知道左右車距離,就可以做到盲點偵測 BSD (Blind Spot Detection ) 技術,如圖四。
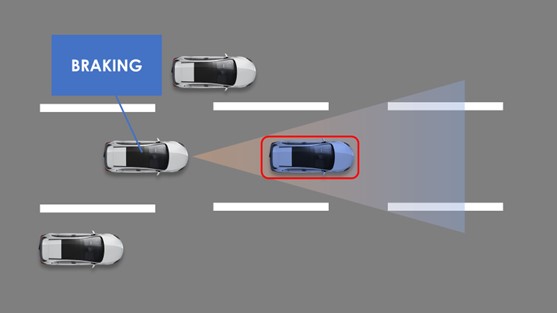
圖三、AEB (Autonomous Emergency Braking)

圖四、BSD (Blind Spot Detection)
如果車輛能夠結合、搭配 BSD 及 LKA ,再進一步就可以做到自動車道變換 ALC (Automatic Lane Change),如圖五,車輛偵測到其他車道沒有其他車輛,就可以自動切換到該車道行駛 。車輛還要能夠判斷交通號誌,TSR (Traffic Sign Recognition)、透過超聲波來偵測近距離的障礙物等等。
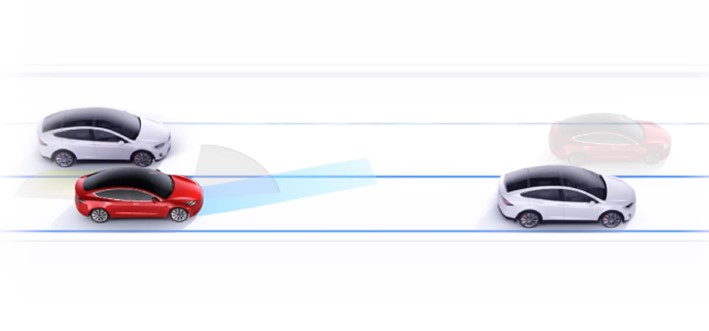
圖五、ALC (Automatic Lane Change) (來源:Tesla)
除了上述這些常見的自駕技術外,老吳在上一篇說過,目前市面上大多數有自駕能力的車輛還是屬於等級 2,車輛真正行駛在道路上,還會遇到不同天候與道路的型態,比方說下大雨,大雪,大霧,沒有車道線,路面結冰,市區光害,人車混雜,複雜區域等等,這對於自駕系統都是非常大的考驗,但相信隨著科技的進步,處理器和感知器的能力增強,最終一定可以實現我們全自動駕駛的願望
參考資料:
- Teals 台灣官方網站 https://www.tesla.com/zh_tw
評論