

主動式功率因數修正器之控制可分為連續導通模式(CCM)、邊界導通模式(BCM)及非連續導通模式(DCM)。連續導通模式是採用電流回授的控制方式,偵測輸入電壓波形的相位及大小來修正輸入電流,以達到功率因數修正的目的。由於電流是操作於連續導通模式,峰值電流相對較小,且所產生之電磁干擾也隨之較低,但控制電路較複雜相對成本也較高,適合大功率的應用。連續導通控制方式包括峰値電流控制法、平均電流控制法以及磁滯電流控制法。非連續導通模式之控制方式一般為電壓隨耦控制法。其控制電路較為簡單,但由於電流是操作於非連續導通模式,易造成過大的電流峰值,增加電路之總諧波失真,且開關元件承受高電流應力,並會造成較大的電磁干擾,適用於低功率的應用。邊界導通模式為變頻操作,偵測電感電流下降為零時再次導通功率開關元件。邊界導通模式控制電路簡單,可達到零電流切換等優點,非常適合做為低功率的應用。但由於電流是操作於邊界導通模式,變頻的工作模式與較大的電流峰值增加了抑制電磁干擾的難度。以下說明常用的控制方法。
峰值電流控制法:
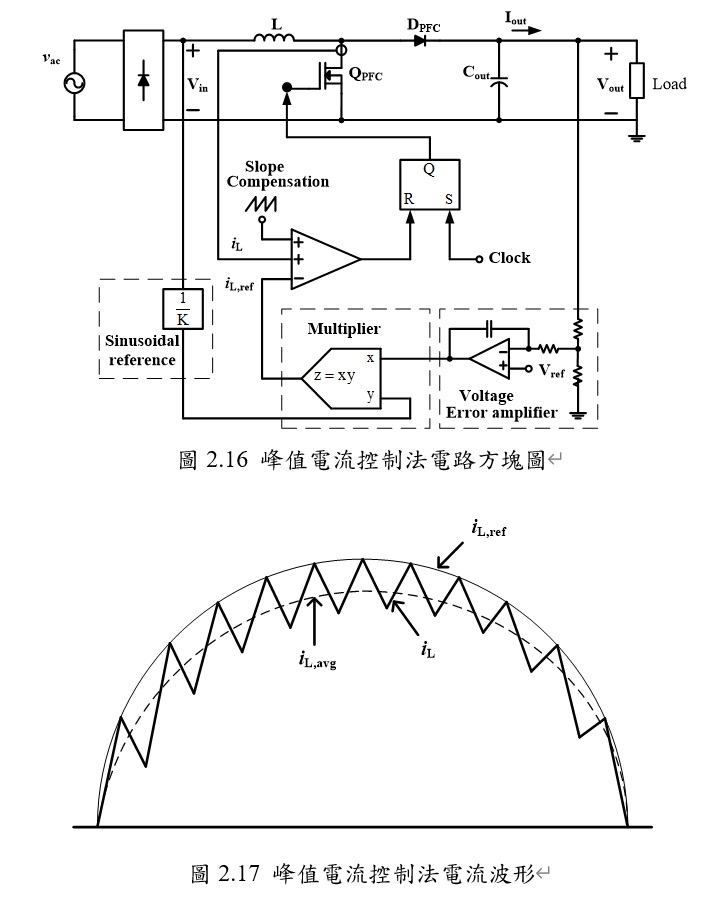
以下說明及圖參考文獻[21]-[25]。峰值電流控制法是進行電感電流追隨峰值電流的控制。電路方塊圖與電流波形如圖2.16與2.17所示。峰值電流控制的功率開關控制一般為定頻操作,動作原理是輸出電壓與誤差放大器的參考電壓Vref比較後,得到的誤差訊號與橋式整流器之後的電壓訊號經由乘法器相乘,得到電感電流的參考準位。此電流準位與電感電流比較後觸發RS正反器控制開關元件。此控制方式之優點為功率開關控制為定頻操作,電流迴路設計容易,但缺點是電感電流於低輸入電壓時,容易受到雜訊干擾,且電感器電流平均值在零交越點附近會有交越失真。
結論
此控制的另一缺點是在定頻控制下,當責任週期超過50%之後,電流誤差量會逐漸增加,產生次諧波(Sub-Harmonic)振盪,因此必須外加斜率補償(Slope Compensation)電路,來改善因為次諧波而造成的系統不穩定,使得電路設計上變得相對複雜。