

一. 概述
上一篇文章介紹了” 3 步驟!標定完成雙目視覺" ,藉由文章內的步驟就可以簡單完成雙目立體視覺的標定與校正,並建構出良好的三維空間與視差影像。
接下來,將來到車道偏移偵測篇章,此次介紹章節為 "精闢 !車道偏移原理解密 (上)" 亦屬於車道偏移偵測篇章(橘色章節),將會介紹車道偏移演算法主要原理為何 ? 如何找到車道線 ?
此外,世平集團 ATU 團隊精心設計的一套 Sky Eye 開發版,幫助我們一同開闊未來 !!
大大通精彩方案 開闢未來_雙目立體視覺帶你進入 FCW & LDW 新視野
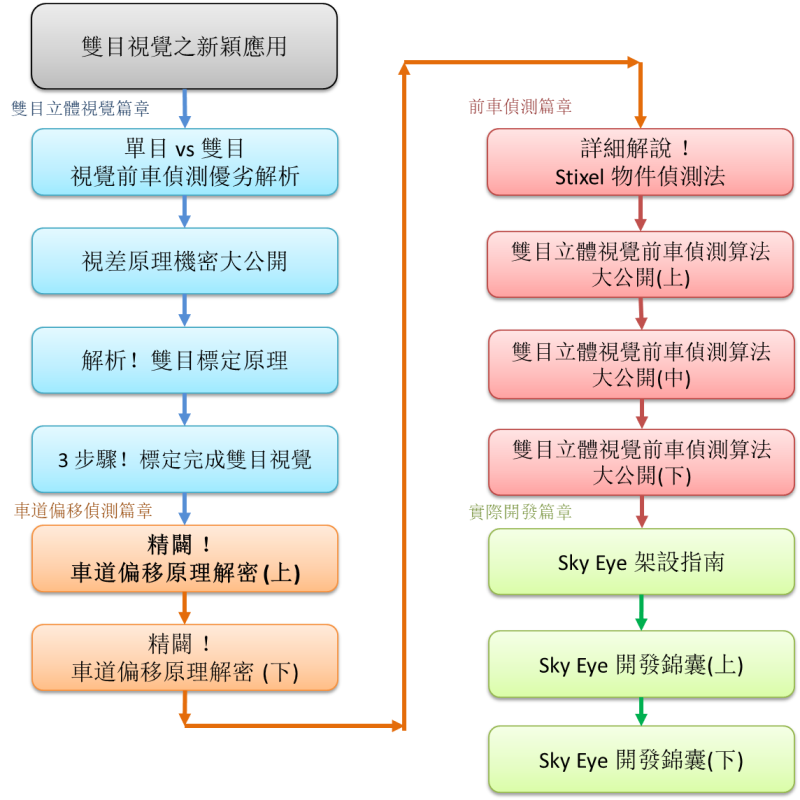
雙目立體視覺技術指南 (前車偵測) - 文章架構示意圖
在介紹車道偏移演算法之前,先來探討主要的三大原理吧
二. 基礎原理 - 霍夫轉換(Hough Transform)
霍夫轉換 廣泛被運用在電腦視覺之中,用於辨識圖形中物件的特徵。最就具名的就是偵測線條,同時亦能檢測圖形中的圓、橢圓形。該演算法利用特徵點在同線段斜率相同的概念,將 直角坐標(Cartesian coordinates) 轉換成 極座標(Polar coordinates) 並累加統計相應次數,最多次數即為最佳線段,如下圖所示,將利用直線方程式作為偵測線段的主軸公式。
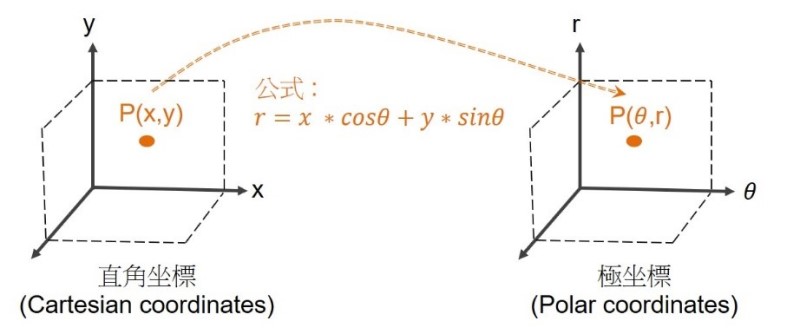
利用直線方程式進行座標轉換之展示圖
然而,在實際運算是需要以統計的方式進行演算。通常會先前定義線段所有角度的可能性(常設置為 -90 至 90 度),接著利用直線方程式求得相對應的截距r,並利用表格統計的方式記錄每次運算的結果。
後續從該表格內找出最佳線段即可,就是該影像中最具代表現的直線。
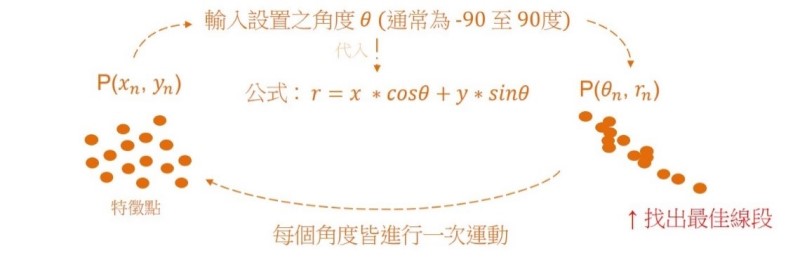
霍夫轉換運算之概念圖
運用於車道偏移偵測系統中,須先行作出特徵影像或二值化影像(Binary Image),接著利用霍夫轉換(Hough Transform) 進行演算,即可找到車道中的直線,如下圖所示,其中亦透過分割感興趣區(ROI) 的方式來強化取得車道線的正確性與提高運算速度。
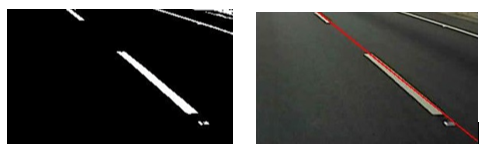
車道偏移偵測之霍夫轉換結果示意圖
三. 基礎原理 - 最大關聯度準則(Maximum Correlation Criterion,MCC)
使用霍夫轉換前,通常會先取得特徵影像或是二值化影像。換句話說,就是利用 閥值(Threshold) 的概念,將像素值大於閥值視為白點(特徵點),反之視為黑點,就如同下圖所展現的二值化影像。找出最佳閥值的方式就是 最大關聯度準則(MCC) 。

二值化影像示意圖
最大關聯度準則(MCC) 是一種呈現直方圖內 ” 熵(Entropy)” 程度的算法,經由機率運算找出系統內,熵值最大之處即為最佳分割的閥值。如下圖所示,運算方式就是先將直方圖內的資料設為 A 與 B 群,統計累加各群的資料量,即總和即為 熵值TE(s) ,也表示系統的混亂程度。
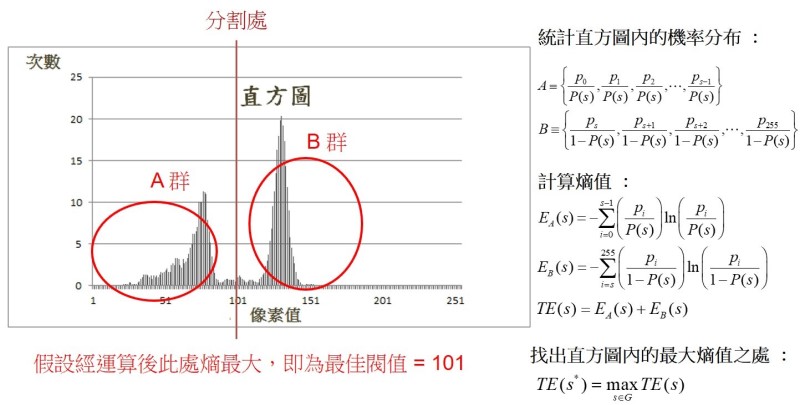
最大關聯度準則之概念示意圖
運用在車道偏移偵測系統中,統計灰階影像之中 感興趣區塊(ROI) 內直方圖資訊。並得以運算出最佳閥值,即可分割出不錯的車道線二值化影像,如下圖所示。
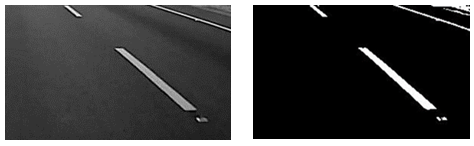
車道偏移偵測之二值化影像結果圖
四. 基礎原理 -影像細線化(Thinning and Skeletonization)
為了大幅度降低霍夫轉換的運算量,這裡採用 影像細線化(Thinning and Skeletonization) 的方式,將特徵縮減並保留線段資訊,如下圖所示。
影像細線化之示意圖
影像細線化的方式有很多種,像是連通分量標記法、區塊抽樣法、骨架檢測法等等皆能減少運算量,保留重要資訊。但對於車道線不須用到這麼複雜的算法,僅須統計連續性的方式,即可達到細線化。
細線化公式(左側) :
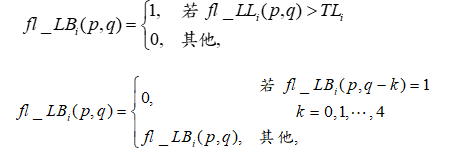
細線化公式(右側) :
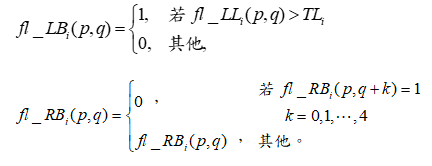
依上述公式,細線化影像分別為左側 fl_LBi 與右側 fl_LBi 影像,閥值為左側 TLi 與右側 TRi。並連續四點皆大於閥值時,則保留像素資訊,反之,則濾除。除此之外,左與右側是有方向性之分的,這是為了增加穩定性並可以強化橫跨車道時的線段資訊。

車道偏移偵測之影像細線化結果圖
以上為車道偏移偵測演算法所運用到之重要原理,下篇文章介紹整個演算法流程與結果! ”精闢!車道偏移原理解密 (下) “
五. 參考文件
[1] 每日頭條網站 - 雙目立體視覺技術的實現
[2] 每日頭條網站 - 雙目立體視覺測量系統應用
[3] 每日頭條網站 - ADAS單目/雙目/三目到底有什麼區別?
[4] 維基百科 - Block-matching algorithm
[5] 論文 - Performance Analysis between Basic Block Matching and Dynamic Programming of Stereo Matching Algorithm
[6] 教材 - Stereo Vision by Professor Fei-Fei Li
[7] 維基百科 - Epipolar geometry
[8] 維基百科 - 單應性
[9] 論文 - A Flexible New Technique for Camera Calibration
[10] 數學工廠 - Camera Calibration 相機校正
[11] CSDN - 雙目測距(雙目標定、雙目校正和立體匹配)
[12] 官方網站 – GNU Octave
[13] 官方網站 – Camera Calibration Toolbox for Matlab
[14] 維基百科 - Hough transform
[15] 論文 - Chong-Wei Li , Jui-Cheng Yen and Hun-Chen Chen, "Safe Driving Monitoring System", June. 2014.
如有任何相關 雙目立體視覺(Stereo Vision) 技術問題,歡迎至博文底下留言提問 !!
接下來還會分享更多 雙目立體視覺(Stereo Vision) 的技術文章 !!敬請期待 【Sky Eye 開闊未來】 !!

評論