

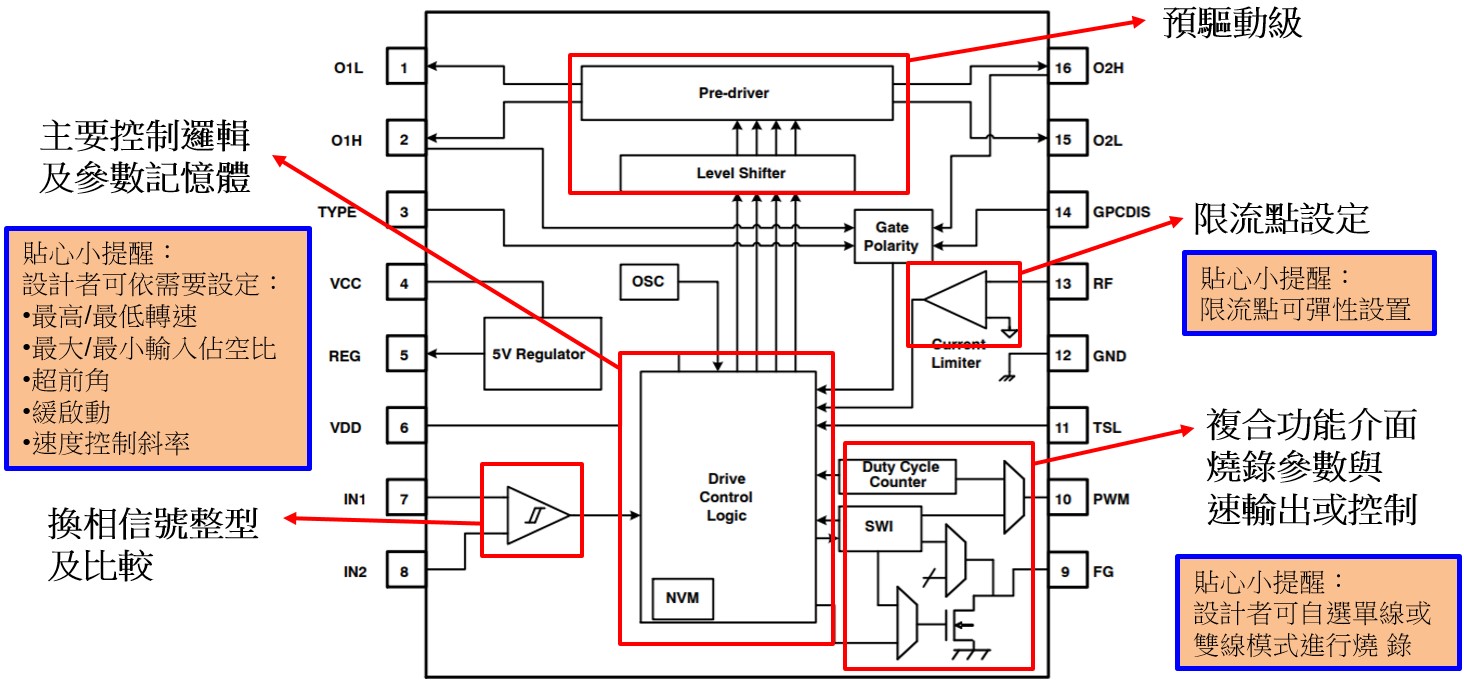
- IC內部主要功能說明:
LV8310HGR2G是用於12 V,24 V和48 V單相BLDC電動機的預驅動器,該電動機通過內置的閉環速度控制器控制電動機的轉速。 可以通過輸入PWM佔空比設置其目標速度。 速度曲線設置可以存儲到內部非易失性存儲器(NVM)中。 此外,還可以通過內部NVM中保存的配置來調整超前角。 因此,它可以高效率和低噪聲地驅動各種電動機。
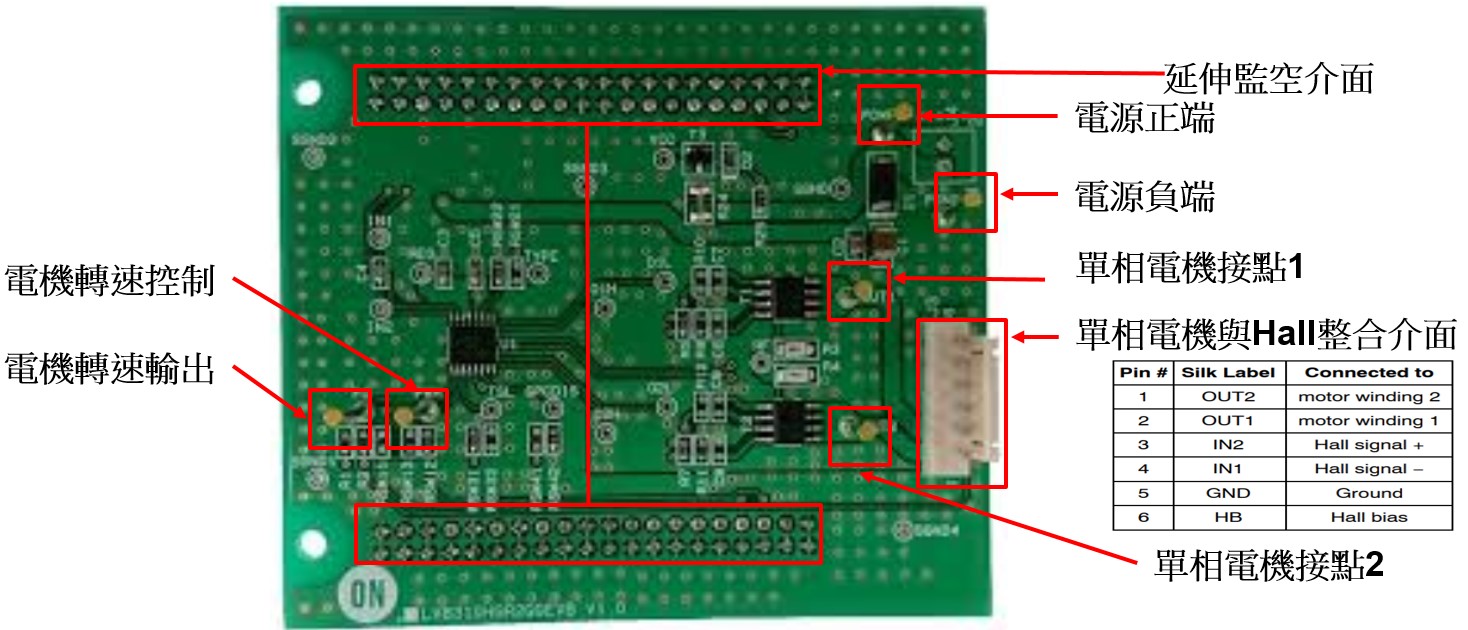
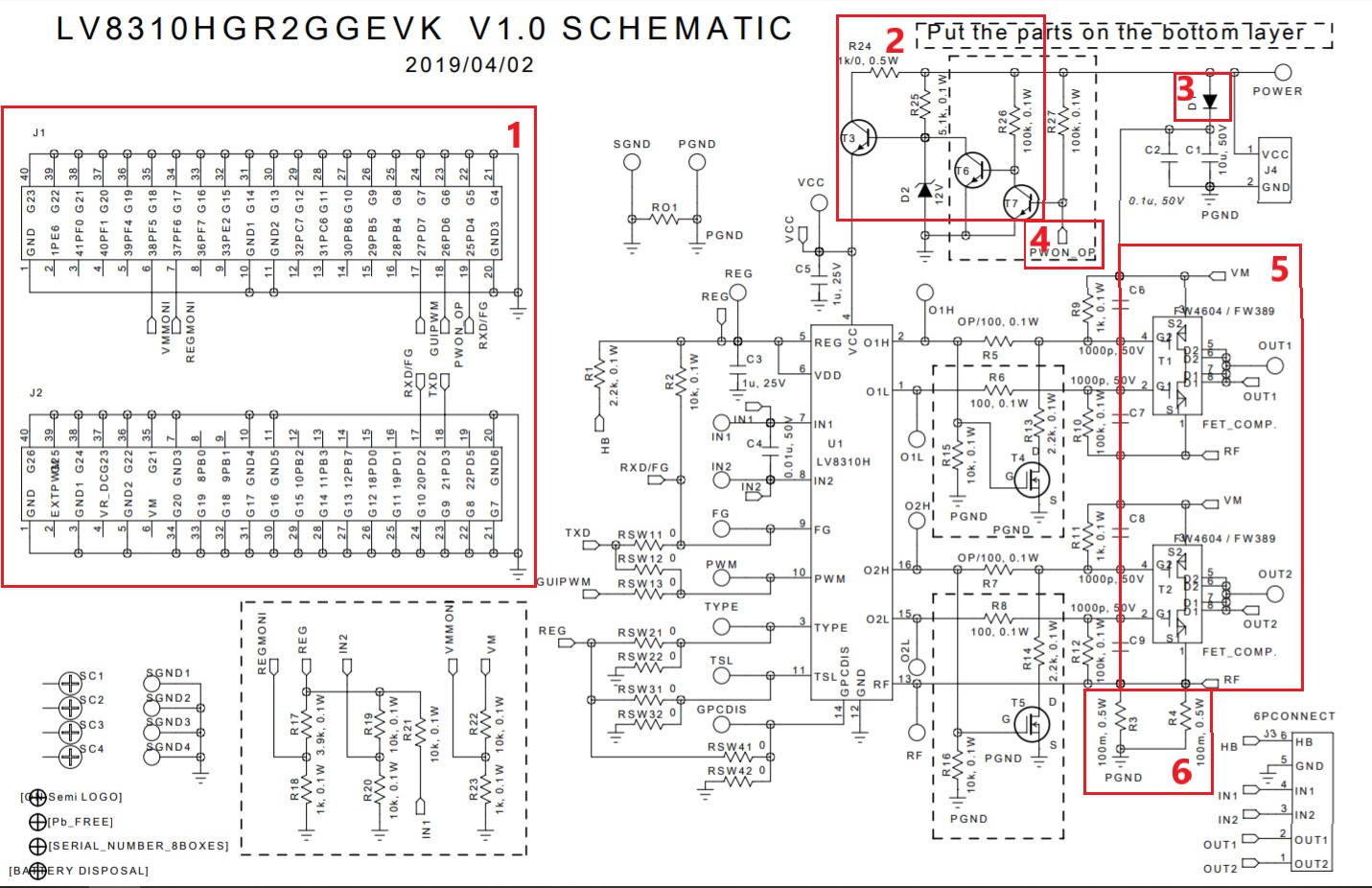
- EVM測試功能接線說明及特色:
- LV8310HGR2G12VGEVK EVM 除LV8310 外同時搭載二顆FW389 P+N MOS線路最為精簡。
- 可程式化調整超前角功能讓使用者在搭配不同規格馬達及不同應用轉速,均能套用同一電子料;市售同等品需有不同的超前角電阻配置故無法完全共料。
- 貼心小提醒:開發初期可先已此介面配合PC端GUI 設定客制化RPM曲線要求 / PWM 有效週期設定 / 超前角設定 / 軟啟動功能說定,之後直接將參數直接燒到客制板上LV8310
- 主要規格介紹:
以下評估套件預期為LV8310H單相BLDC電機控制應用提供一個簡單的快速開發平台。
LV8310HGR2G12VGEVK(用於12 V電機)
LV8310HGR2G48VGEVK(用於24 V / 48 V電機)
LV8310H具有以下獨特功能:
使用標準風扇接口(PWM和FG)的通訊模式
控制參數實時變化
輸入PWM數值的數字仿真
存儲參數和配置到片上預設性記憶為了激活這些功能,套件中包括帶有微控制器的母板,可通過USB與基於PC的圖形用戶界面(GUI)進行通信,並通過PWM – FG與設備進行通信。
該套件包括:
a.電機驅動器評估板(EVB)
b.母板
c.USB電纜A型到Mini B
d.圖形用戶界面軟件(從網站下載)
貼心小提醒:
設計者可依需要設定:最高/最低轉速;最大/最小輸入佔空比;超前角;緩啟動;速度控制斜率等功能均需透過GUI介面進行。但若無任何燒錄行為,LV8310H 也會參照內部預設值運作。
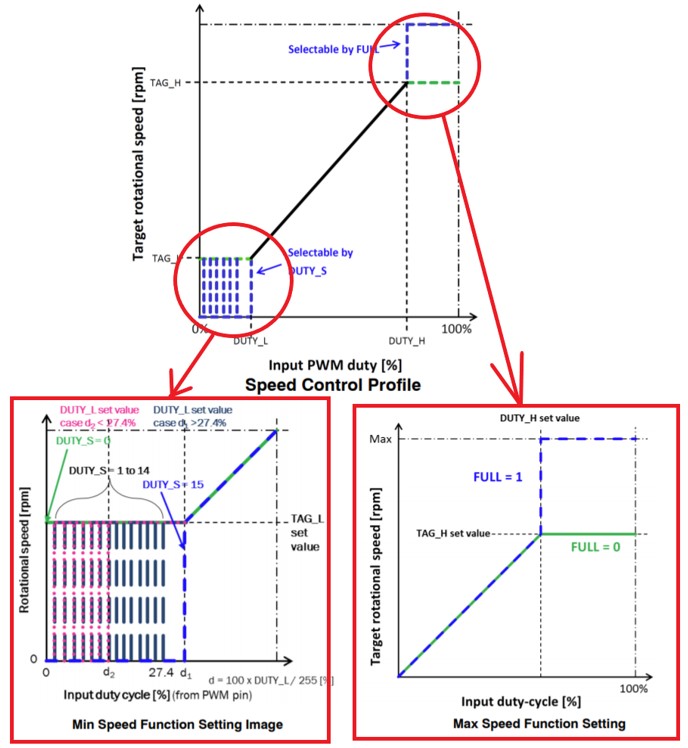
- 轉速曲線介紹:
- 控速風扇/馬達所使用的轉速通常介於低速15~40duty與高速85duty以上,隨著產品與負載特性不同會有不同的控速區間條件。
- 最高可控速度以上的duty輸入時通常會有定轉速及最高轉速兩種選項(如右下圖)。
- 最低可控轉速以下的duty輸入時通常是直接停轉,而該值通常會設計在最低起動duty之上(如左下圖)。
- 若需0~100duty有完全的線性控速功能,則需改用高階微處理器方案。
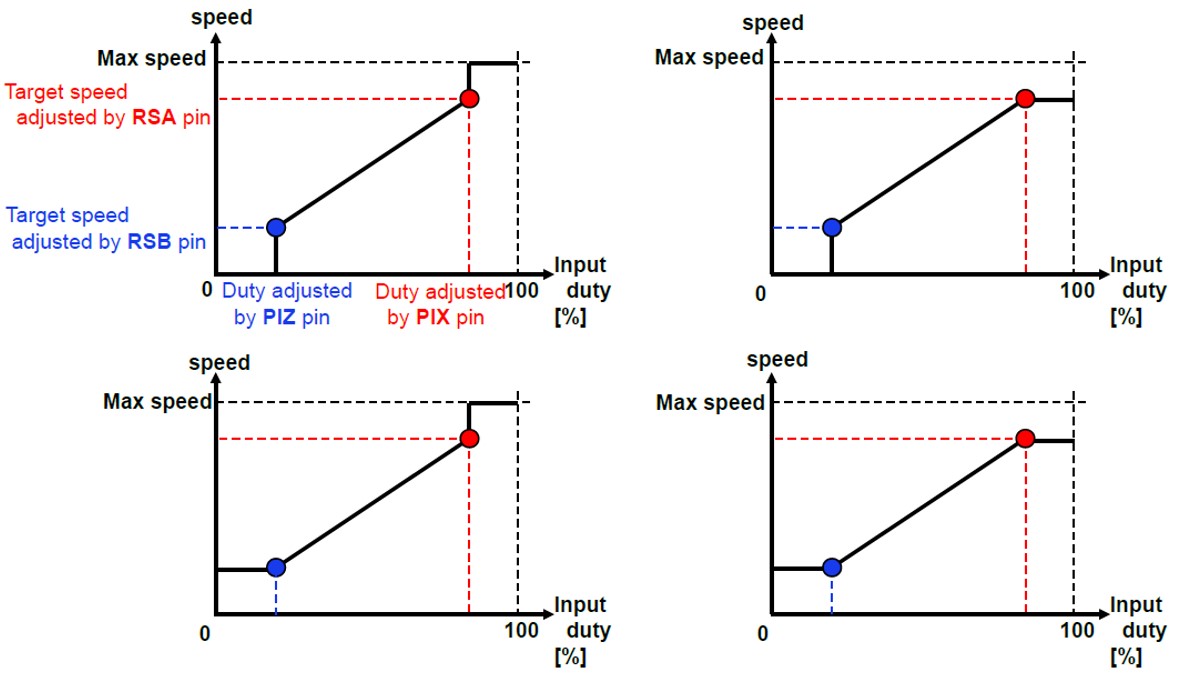
- 轉速曲線範例:
- 以下四種是最常見RPM曲線設定模式:
- 高轉速通常會設定在可控位置,所以不會使用Max speed, 因可避免因生產公差所產生的最大轉速誤差問題。
- 低轉速必需在最低起動點duty之上設定目標控制方式,只能有兩種選項,其一是低於即停轉,其二是低於仍保持固定轉速。
- IC主要優勢:
高效率和低振動驅動
- 超前角調整-可有效提高效率並同時降低馬達的振動,因最佳的換相位置會降低馬達內部電磁跟永磁互斥的時間
最小的解決方案佔地面積
- 所有參數調整都是通過串列介面對內部暫存器設定,有別於其他產品採用外部零件設置的會增加許多外部零件
- 所有參數不同的機種可通用同一硬體PCBA,讓物料管理方便許多
更高的系統可靠性
- 內置欠壓/過溫/過流/鎖死保護大大提昇產品信賴度
- 面對MCU方案的對手雖也有通用同一硬體PCBA的好處,但前述保護功能均需額外的離散元件搭配MCU來完成,除增加零件外同時也提高零件失效的機率
車用鼓風扇
桌上型電腦
伺服主機
家電產品散熱
低價BLDC 相關產品

|
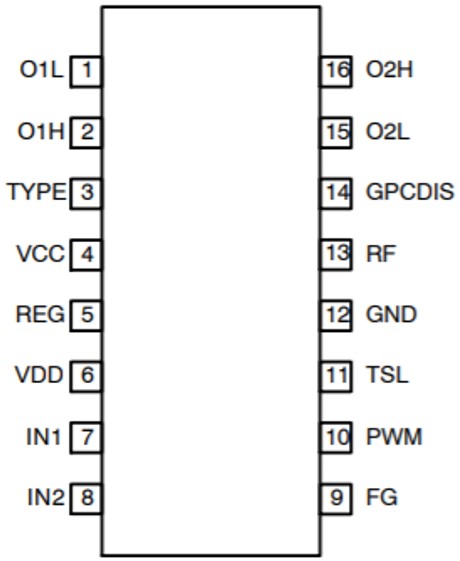
Pin Number |
標示 |
說明 |
|
1 |
O1L |
第一組半橋下臂外部功率FET的柵極驅動輸出 |
|
2 |
O1H |
第一組半橋上臂外部功率FET的柵極驅動輸出 |
|
3 |
TYPE |
應用類型選擇 (L:12 V應用程序,如圖1所示,H:24 V / 48 V應用程序,如圖2所示) |
|
4 |
VCC |
外部電源 |
|
5 |
REG |
5 V穩壓器輸出,最大負載電流為20 mA |
|
6 |
VDD |
內部控制邏輯電路的電源引腳,該引腳必須連接到REG引腳 |
|
7 |
IN1 |
霍爾傳感器輸入引腳,霍爾傳感器的差分輸出需要連接到IN1和IN2 |
|
8 |
IN2 | |
|
9 |
FG |
轉速輸出(FG輸出與霍爾傳感器信號同步)。 通過Reg的位設置,該引腳可以用作RD(旋轉檢測)。 建議的提昇電阻為1 K至100 K。 不使用時,使引腳保持打開狀態。 通過通訊進行的參數設置由引腳使用來完成 |
|
10 |
PWN |
轉速控制信號輸入。 旋轉速度由脈衝的佔空比控制,並且與占空比成正比。 通過該引腳通過通訊進行參數設置 |
|
11 |
TSL |
通訊輸入選擇和內部測試模式引腳。 與GND連接時,FG引腳為串行輸入/輸出。 與REG連結時,PWM引腳為串行輸入,FG引腳為串行輸出 |
|
12 |
GND |
內部電路接地引腳 |
|
13 |
RF |
感測電阻器電壓輸入,用於電流限制/過流保護 |
|
14 |
GPCDIS |
O1H,O2H上/下柵極極性檢查功能禁用(低:啟用,高:禁用) |
|
15 |
O2L |
第二組半橋下臂外部功率FET的柵極驅動輸出 |
|
16 |
O2H |
第二組半橋上臂外部功率FET的柵極驅動輸出 |
參數燒錄控制介面
線性穩壓電路
反電動勢逆灌保護
IC電源開關
外部功率元件 (可視需求調整規格)
限流保護 (可視需求情況調整並聯電阻以分散熱源)
LV8310H Datasheet :
https://www.onsemi.com/pub/Collateral/LV8310H-D.PDF
LV8310HGR2G12VGEVK EVM :
https://www.onsemi.com/support/evaluation-board/lv8310hgr2g12vgevk
評論