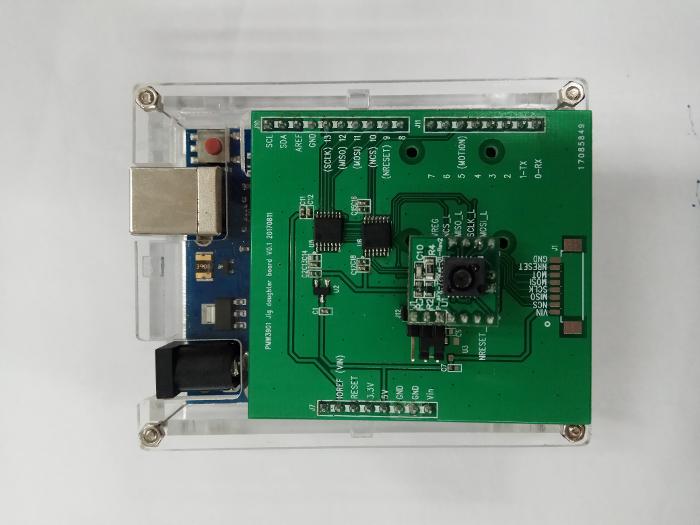
目前市場上掃地機器人的清潔打掃路徑規劃基本都是由超聲波、紅外等感測器測量當前位置結合演算法規劃出,由於感測器精度,輪子打滑導致無法測試出掃地機器人實際運行的精確軌跡和線路,Pixart PAA5100JE-Q Optical Tracking Chip為未來掃地機器人移動檢測和位移座標輸出提供解決方
為提供您更多優質的內容,本網站使用 cookies 分析技術。若繼續閱覽本網站內容,即表示您同意我們使用 cookies,若不同意請關閉瀏覽器的 cookie 功能,關於更多資訊請閱讀 Cookie 政策平台服務條款