

目前市場上掃地機器人的清潔打掃路徑規劃基本都是由超聲波、紅外等感測器測量當前位置結合演算法規劃出,由於感測器精度,輪子打滑導致無法測試出掃地機器人實際運行的精確軌跡和線路,Pixart PAA5100JE-Q Optical Tracking Chip為未來掃地機器人移動檢測和位移座標輸出提供解決方案.
搭載了Pixart PAA5100JE-Q的掃地機器人的工作原理與我們常用的光電滑鼠類似。掃地機器人靠外界環境光或發光二極體補光將地面影像通過透鏡聚焦在senser array區內成像,當機器人移動時,其移動軌跡便會被記錄為一組高速拍攝的連貫圖像。再利用sensor 內的DSP對每張圖像特徵點進行處理比對,用以判斷掃地機器人移動的方向以及位移,從而得到掃地機器人x、y方向的移動資料,最後通過SPI傳給MCU。MCU對這些資料進行處理,來獲取機器人的運動路徑。
►場景應用圖
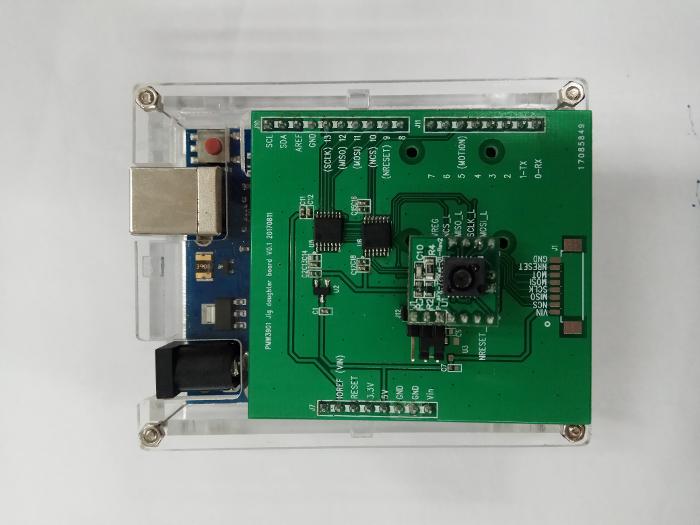
►產品實體圖

►展示板照片

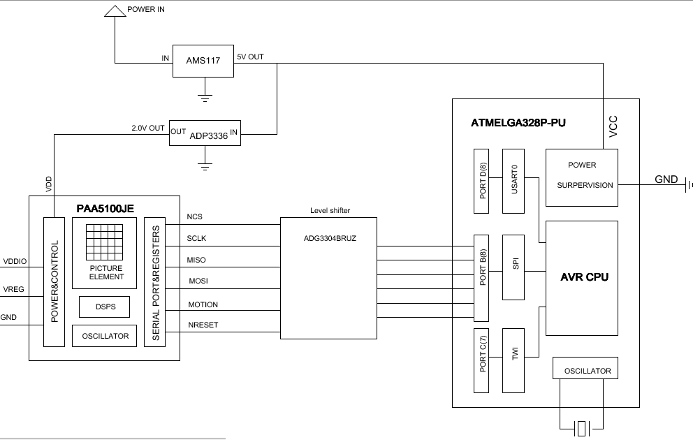
►方案方塊圖
►核心技術優勢
1. 判斷檢測物體移動的方向和速度。 2. 輸出移動軌跡,對比設定的路線,調整移動方向和位置。 3. 檢測掃地機遇到障礙,輪子打滑現象。
►方案規格
1. 檢測距離15-35mm. 2. 已含透鏡,不需要再裝配額外的透鏡。 3. 工作電流(Chip only)<9Ma. 4. Motion 偵測腳輸出。