

隨著生活水平的提高,我們也越來越注重家居的生活品質,此時智能產品也不斷出現在我們的生活當中,大到選購家具櫥櫃小到家用電器,都會格外用心,以達到提升家居質感。而智能家居領域中的掃地機器人,無疑具備了這種時尚又實用的特質,受到越來越多的消費者的喜愛和認同。
掃地機器人的基本功能是清掃、吸塵、拖地,通過對於清掃毛刷的材料、結構形式、旋轉方式,以及拖布材料、供水量、拖布布置方式等功能實現了更好的清潔效果,除此基本功能外,較新的產品向“智能家居”轉型發展。其智能化發展分為兩個階段。第一階段實現掃地機器人與智能設備的互聯互通。第二階段是掃地機器人通過傳感器觀測環境中的信息,實現機器人自主導航定位,完成一站式的智能清掃方案。導航系統在機器人產品中的大幅應用提升了掃地機器人的智能化程度。
儘管掃地機器人具備種各種優勢,但在中國的使用率仍然不高。有數據調查顯示美國家庭掃地機器人的使用率在16%,中國沿海地區掃地機器人的使用率只有不到5%,內陸地區則僅為0.5%。而與掃地機器人形成互補和替代作用的則是洗衣機和吸塵器,在中國家庭里洗衣機的使用率將近90%,家用吸塵器也達到了30%—40%。所以掃地機器人市場在中國乃至世界還是有很大的發展空間。
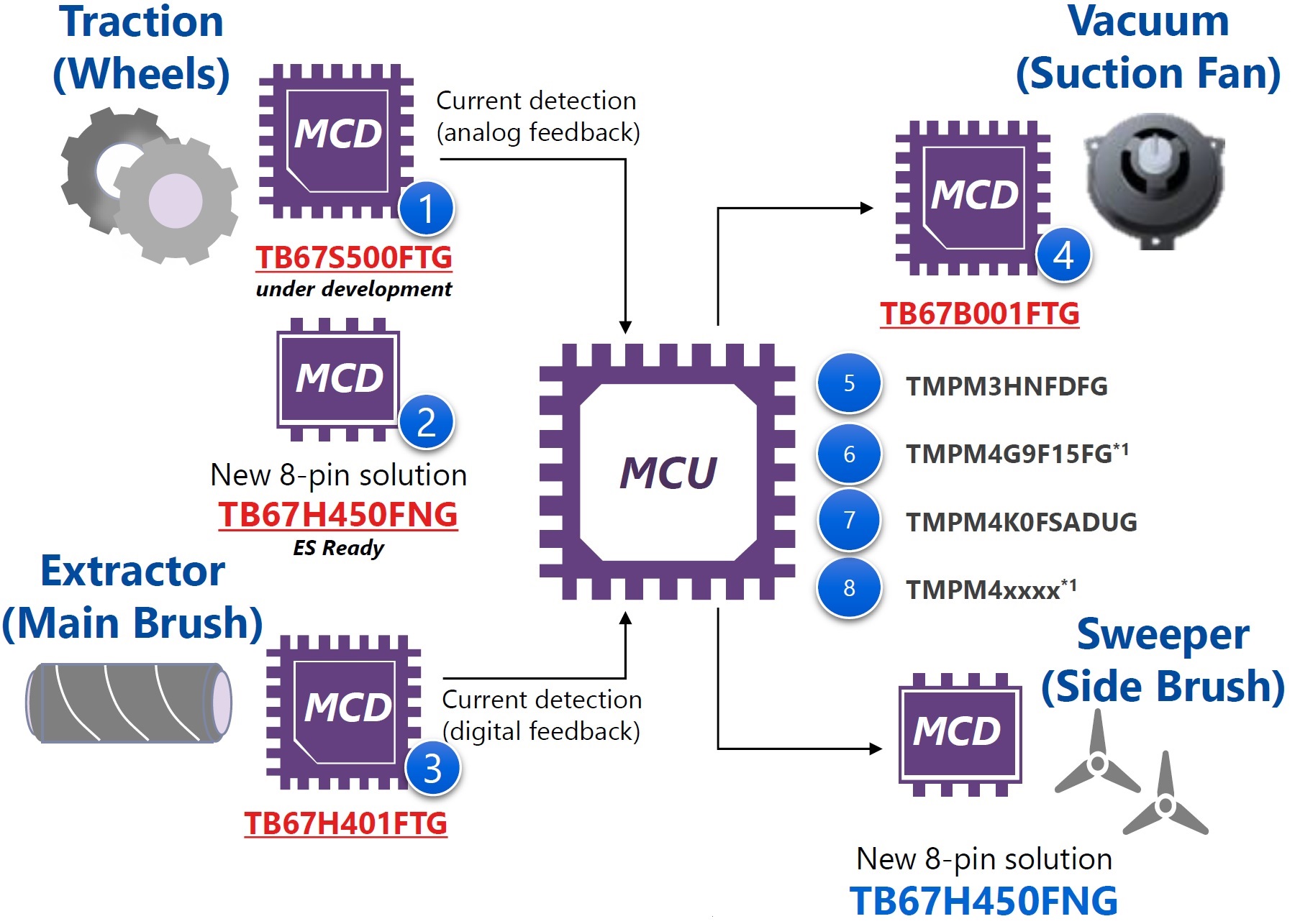
►場景應用圖
►產品實體圖

►展示板照片

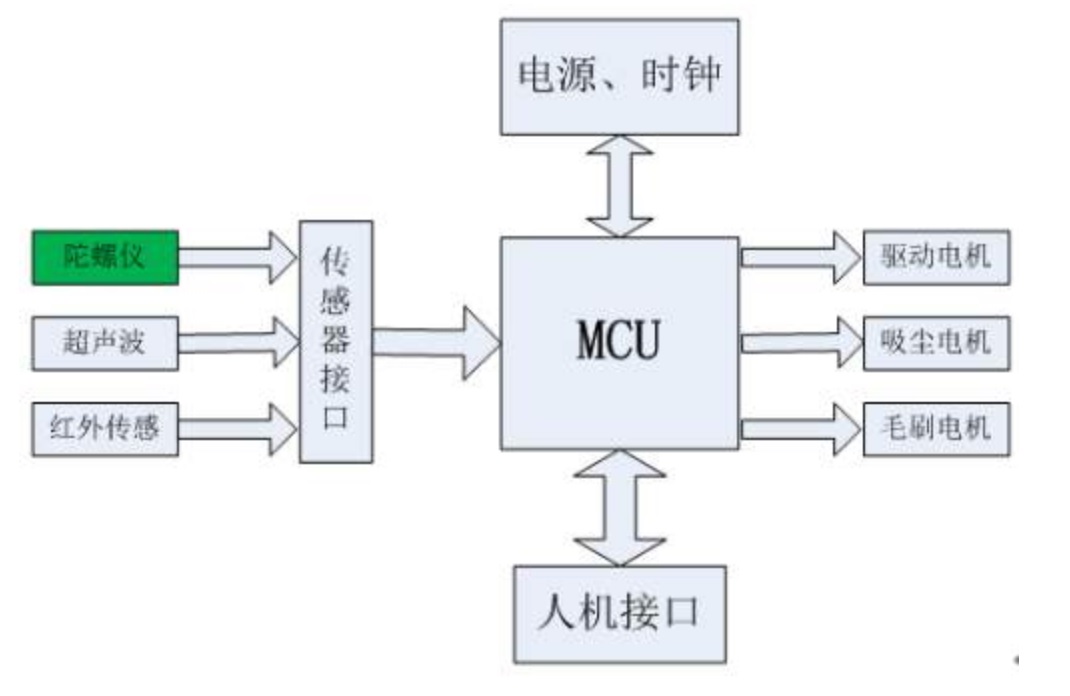
►方案方塊圖
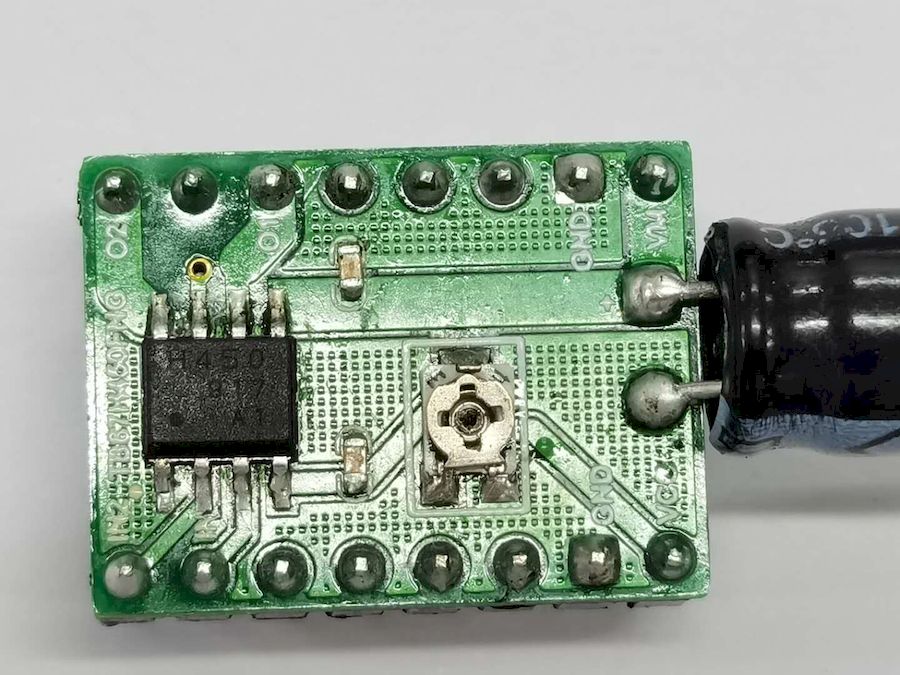
►掃地機器人背面

►TB67H450FNG 位置圖
►核心技術優勢
1、 採用東芝度獨有的BiCD工藝製造。 2、 支持正向/反向/制動/停止四種工作模式。 3、 內置多種錯誤檢測功能(熱關斷TSD、過流檢測ISD和欠壓鎖定UVLO)。 4、 內置VCC穩壓器,用於內部電路工作等等。
►方案規格
1、 工作電壓範圍更廣4.5V-44V(同行業里TI的DRV8870在4.5V-44V,而Allegro的A4950隻有8V-40V)。 2、 額定輸出電壓最大50V,最大電流3.5A(與行業TI的DRV8870一樣,而高於Allegro的A4950的40V/3.5A)。 3、 待機電流低至1uA(同等型號行業里TI的DRV8870和Allegro的A4950都在10uA)。 4、 內置帶低導通電阻輸出MOSFET(高壓側+低壓側)RDS(H+L)低至0.6Ω—0.8Ω。 5、 內置多種錯誤檢測功能,如熱關斷(TSD)*自動恢復:當IC的結溫達到TSD的閾值150℃-175℃時,觸發TSD電路,當結溫降低到要返回的溫度時,IC自動返回。此功能電路用於檢測熱誤差的後背功能,因此不建議經常使用。 6、 過流檢測(ISD): 當輸出電流達到閾值4.1A-5.7A時,就會觸發ISD電路,然後內部復位電路關閉輸出電晶體,將集成電路設置為待機模式,需重新建立VM電源或設置待機模式後才能恢復操作。此功能Toshiba有兩種模式的型號供客戶選擇。一顆是和Allegro的A4950一樣待機後需手動恢復才能工作的TB67H450FNG,而另一顆是和TI的DRV8870一樣待機後可以自動恢復工作的TB67H451FNG。 7、 欠壓鎖定(UVLO):當VM腳的供電電壓為3.8V或更低時,觸發內部電路,內部復位電路關閉輸出電晶體,觸發UVLO後,將VM電源電壓重新設置為4V或更高即可清楚UVLO,使產品正常工作。 8、 TB67H450FNG/451FNG的封裝採用是HSOP8(4.9*6mm)封裝,為了方便散熱,晶片底部設有PAD點,所以Layout請注意其它腳位焊盤的擺放,應注意輸出、VM、GND的layout布局,謹防與晶片底部PAD出現短路現象,在元件擺放和布局中也應注意,因電源引腳(VM、RS、OUT1、OUT2、GND)腳會通過極大電流,Layout時要注意連接正確且布線需加粗,防止工作過程中出現運行錯誤導致元件毀壞。