

無人機技術非常有趣,因為它涉及最先進的設計原則: 平衡飛行時間,尺寸和重量,穩定性,系統複雜性,邏輯,特殊功能和關鍵安全著陸等演習。
無人機製造商通常需要開發以下不同的子系統來生產可行的最終產品:
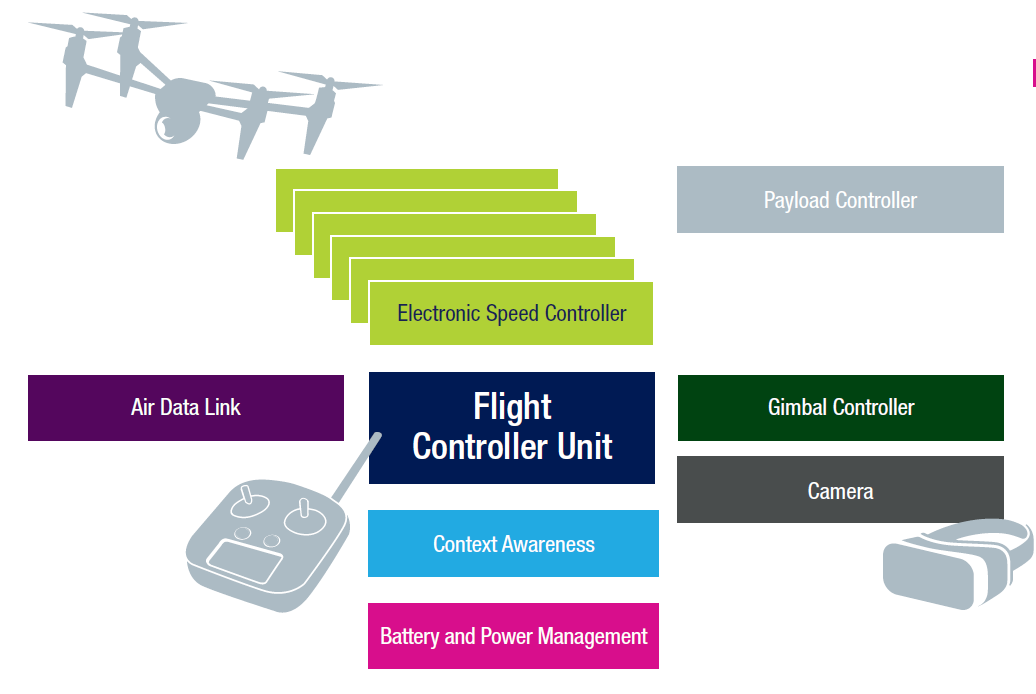
•飛行控制器單元(FCU),用於管理不同條件下的飛行,依賴其慣性測量單元(IMU)用於穩定無人機懸停。在專業無人機中,FCU嵌入了GPS(全球定位系統)形成自動駕駛系統。
•幾乎四個電子速度控制器(ESC)用於控制電動機的複雜性算法,允許高轉速,同時延長電池壽命。
•攝像機穩定器,通過伺服電機旋轉和穩定攝像機。
•Air Data Link,用於遠程控制和FCU命令的實時通信。
•高端無人機的電源管理階段,可有效分配電池能量於不同的電機。
本電路板是用於無人機的電子速度控制器(ESC)(STEVAL-ESC001V1) 設??計適用於入門級商用無人機設計,並驅動任何三相無刷(或PMSM)電機運行6S LiPo電池組或任何等效直流電源,最多30A峰值電流。
由於完整的預配置固件包(STSW-ESC001V1),STEVAL-ESC001V1可讓您在幾分鐘內旋轉電機及其螺旋槳,實現無傳感器磁場定向控制算法,具有3相電流讀數,速度控制和全主動制動。
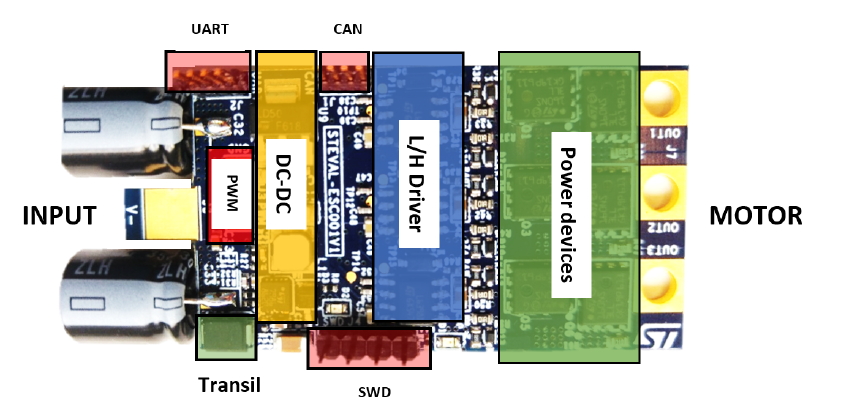
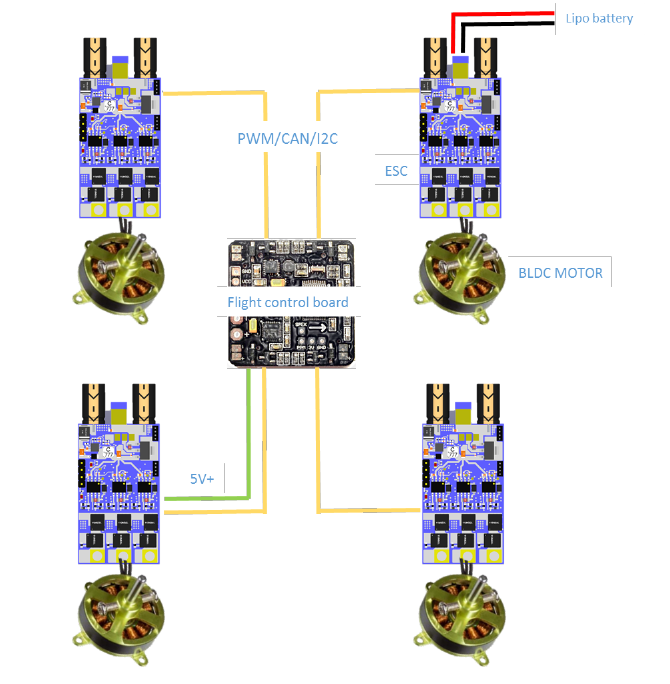
參考設計板可以通過PWM信號接收飛行控制單元的命令;其他通信總線接口,如UART,CAN和I²C也可用。
該參考嵌入了一個工作電壓為5 V的電池消除電路,一個用於溫度測量的NTC傳感器和用於過流/過壓保護(OCP / OVP)的電路。
緊湊的外形和電流能力使該參考設計適用於專業無人機等小型和輕型無人機上的電子速度控制器。
STSW-ESC001V1固件/軟件包以及STM32 PMSM FOC軟件開發套件 - MC庫可讓您通過STM32中嵌入的磁場定向控制參數來優化您的電子速度控制器設計,並使用ST電機分析儀進行實驗,以快速檢索電機參數。 ST無傳感器FOC算法可確保更長的飛行時間和最佳的動態性能。
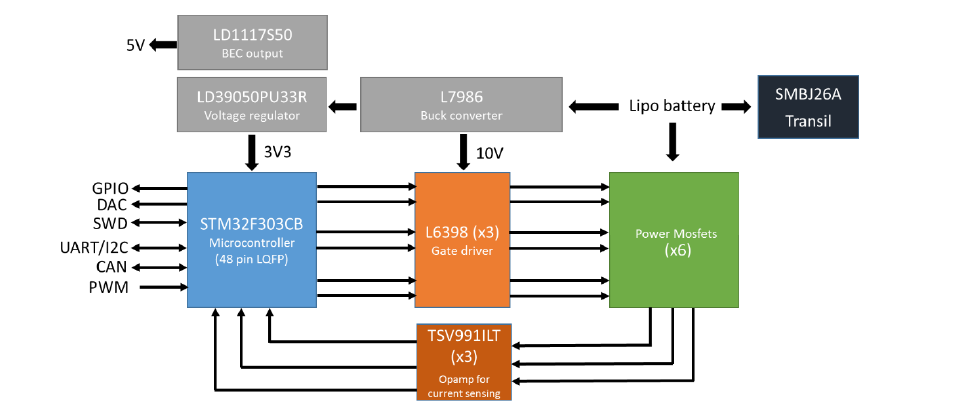
STEVAL-ESC001V1採用高效率,低Rdson STripFET F7功率MOSFET,高性能STM32F303CBT7微控制器和ARM®Cortex®-M4內核以及L6398驅動器設計。延伸運用於遙控車輛的電機驅動:電動汽車,直升機,卡車等
任何三相BLDC或PMSM電機應用
硬建設計過程如下
反相器部分由L6398柵極驅動器,STL160N4F7和功率MOSFET組成。
L6398高壓高低側驅動器
L6398是採用BCD™“離線”技術製造的高壓設備。 它是單芯片的一半
N溝道功率MOSFET或IGBT的橋式柵極驅動器。
高側(浮動)部分設計為可承受高達600 V的電壓軌。邏輯輸入為CMOS / TTL
兼容低至3.3 V的電壓,可輕鬆連接微控制器/ DSP。
主要特色:
高壓軌,最高600 V
•dV / dt抗擾度在整個溫度範圍內為±50 V / ns
•驅動器電流能力:
– 290 mA源
– 430 mA灌電流
•1 nF負載時開關時間上升/下降75/35 ns
•3.3 V,5 V TTL / CMOS輸入比較器,具有滯回
•集成自舉二極管
•修復了320 ns的死區時間
•聯鎖功能
•緊湊而簡化的佈局
•物料清單減少
•靈活,便捷的設計
STL160N4F7 160 A STripFET™F7功率MOSFET
該N溝道功率MOSFET使用STripFET™F7技術,具有增強的溝槽柵極結構,
使通態電阻非常低,同時還減少了內部電容和柵極電荷,從而實現了更快的
更有效的切換。
L7986,LD1117S50和LD39050PU33R
這些器件為柵極驅動,BEC輸出和MCU電源提供適當的電壓。
另外STSW-ESC001V1是STEVAL-ESC001V1的無傳感器FOC參考設計程式
用於STEVAL-ESC001V1板的此程式軟件包為無人機電子速度控制器(ESC)實施了無傳感器的磁場定向控制(FOC)。 它包括當電動機失速時(例如,螺旋槳堵塞)的自動重啟功能以及ESC撤防/撤防安全措施。
STSW-ESC001V1固件軟件包包括三個部分:STEVAL-ESC001V1的電動機控制固件,用於通過ST Motor Profiler操作STEVAL-ESC001V1參數的PC軟件插件以及項目文件。 適用於ST電機控制工作台(STSW-STM32100)。
無傳感器FOC算法驅動電動機,固件通過PWM信號接受來自大多數常見飛行控制單元的命令; 開發人員還可以通過STEVAL-ESC001V1板上的相關連接器利用CAN,UART或I²C通信。
ST Motor Profiler的插件提供了實時的電動機參數信息,可幫助您快速使無人機飛行。
網頁如下
https://www.st.com/content/st_com/en/products/embedded-software/motor-control-ic-software/stsw-esc001v1.html
►場景應用圖

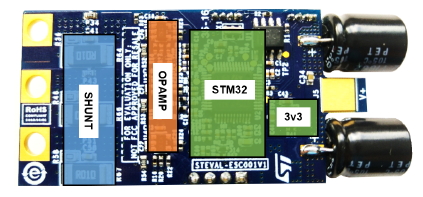
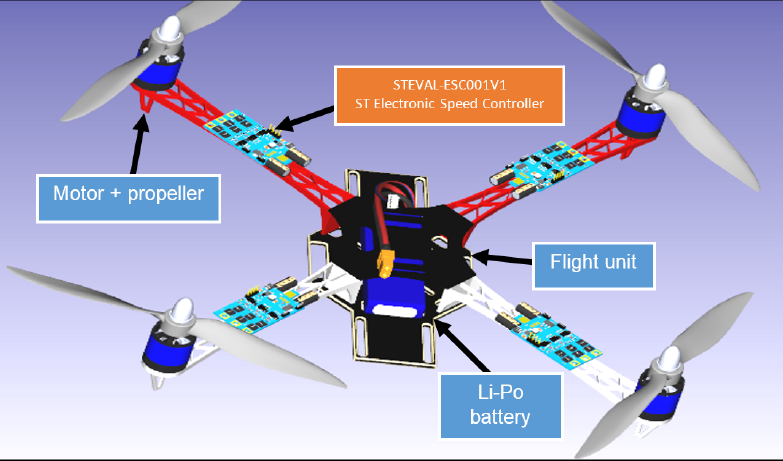
►產品實體圖
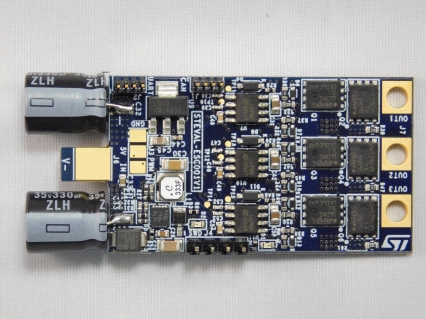
►展示板照片
►方案方塊圖
►無人機架構
►於無人機的腳色
►功能圖
►核心技術優勢
基於磁場定向控制(FOC),STEVAL-ESC001V1中使用了更複雜的控制算法;它的特點: •更好的扭矩控制 •負載快速變化時的電機電流調節 •減振 •主動制動功能 •更高的效率 •降噪 •實時監控轉子轉速 •減速期間的能量回收
►方案規格
完整的電子速度控制器參考設計,實現無傳感器FOC算法 專為配備6S LiPo電池的無人機或具有等效DC電源的系統而設計 電子速度控制器準備好與任何標準飛行控制單元(FCU)通信:PWM或CAN 溫度過熱保護 標稱工作電壓範圍:3S-6S鋰電池直流電壓等級(11.1至22.2 V) 最大RMS輸出電流:20 A rms 輸出峰值電流:30 A. 去電池電路(BEC):外部接收器或FCU為5 V / 0.5 A. 提供完整的預配置程式包(STSW-ESC001V1) 由ST電機控制軟件SDK和ST電機分析儀支持 緊湊的PCB設計:29.1 x 58 mm 更多目標應用: 遙控車輛的電機驅動:電動汽車,直升機,卡車等 任何三相BLDC或PMSM電機應用 符合RoHS和WEEE標準