

一. 方案簡介
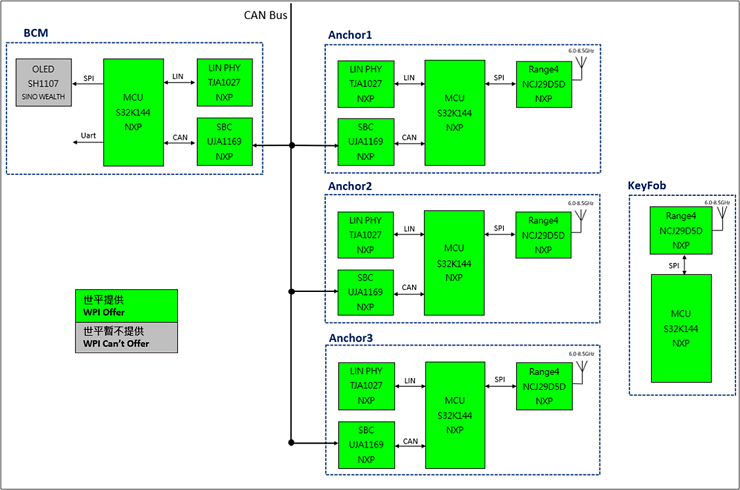
基於 NXP NCJ29D5D UWB 的定位演算法方案,利用三個 Anchor 可做到與 Key Fob 之間的範圍定位,BCM 與 Anchor 間透過 CAN Bus 進行數據傳送,由 MCU ( S32K144 ) 本身運行定位算法,演算 Key Fob相對的 XY 位置,更貼近客戶的應用需求。
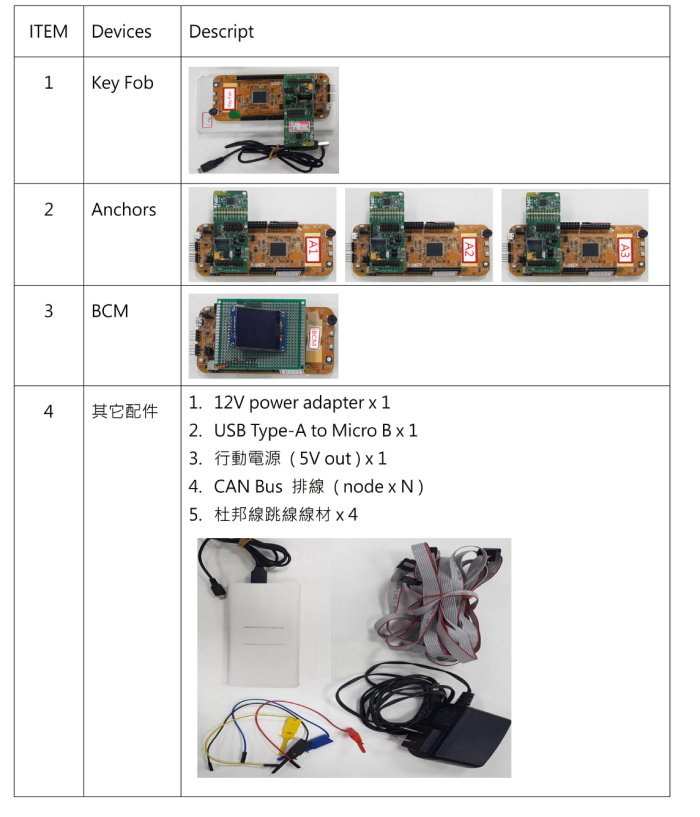
二. 方案產品照片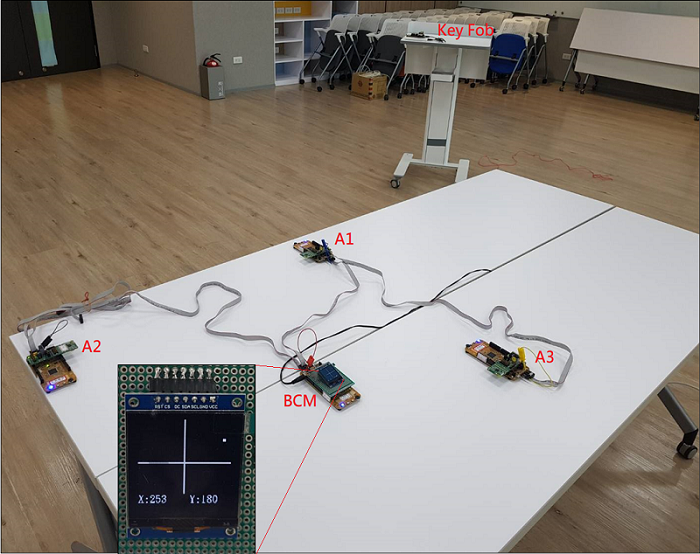
三. 軟體設計流程與定位演算原理說明
1. 軟體設計流程
如下為 UWB 定位流程框架與處理程序,分別是藍色為 BCM、橘色為 Anchors 所進行的程序與資料處理 : 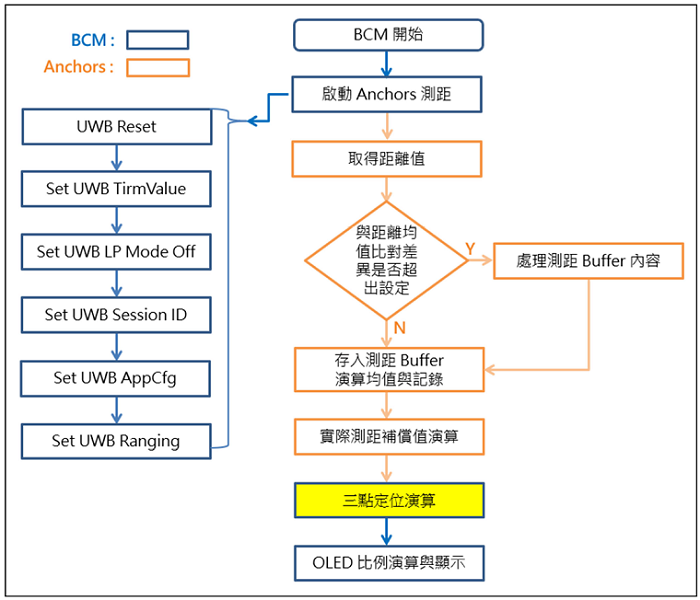
**提供大大通技術交流連結
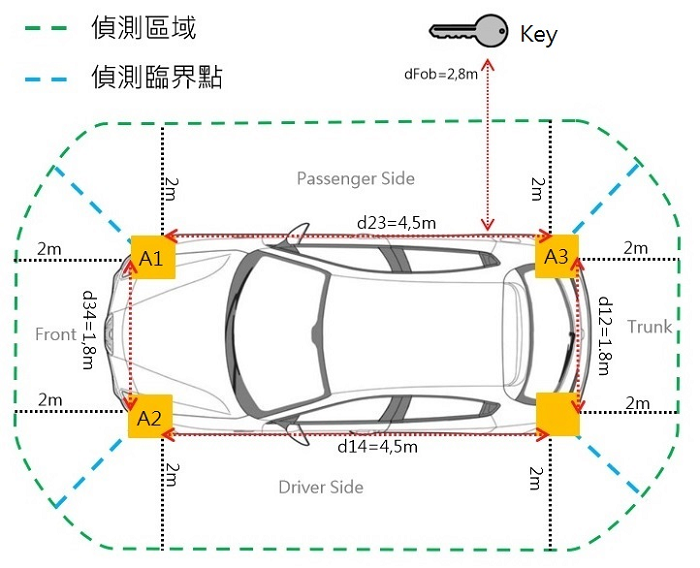
►場景應用圖
►展示板照片
►方案方塊圖
►核心技術優勢
ATU 提供技援 : • 提供 UWB 三點定位演算法的樣本軟體 • 提供軟體技術諮詢
►方案規格
功能描述 : • BCM 上電後啟動 Anchors 與 Key Fob 測距及定位演算 • 將 Key Fob 相對位置定位資訊在 OLED 上顯示 方案特點 : • UWB 測距數據優化處理,及距離校正補償 • BCM 透過 CAN Bus 取得 Anchors 測距資料與執行定位演算法