

汽車方向盤轉向系統,從上世紀50年代到本世紀初,經歷了翻天覆地的革新和變化。
最早是純機械轉向,駕駛員打轉車輪需要克服前輪帶來的強大摩擦力力,使得駕駛機動車十分吃力。上世紀50年代,液壓助力(HPS)轉向系統應用在汽車上,標誌著轉向助力的開始。在HPS助力下,駕乘體驗有了質的飛越,但是HPS弱點在於成本高、維修難且增加油耗。後來又經幾代人的努力,轉向系統從液壓助力(HPS)到電子液壓助力(EHPS),再到如今的純電動轉向助力(electrical power steering,簡稱EPS),80年代,日本鈴木首先在其車型上使用EPS轉向助力,標誌著電動時代的來臨。如今,幾乎所有乘用車都採用EPS轉向助力。它有以下幾個優點:
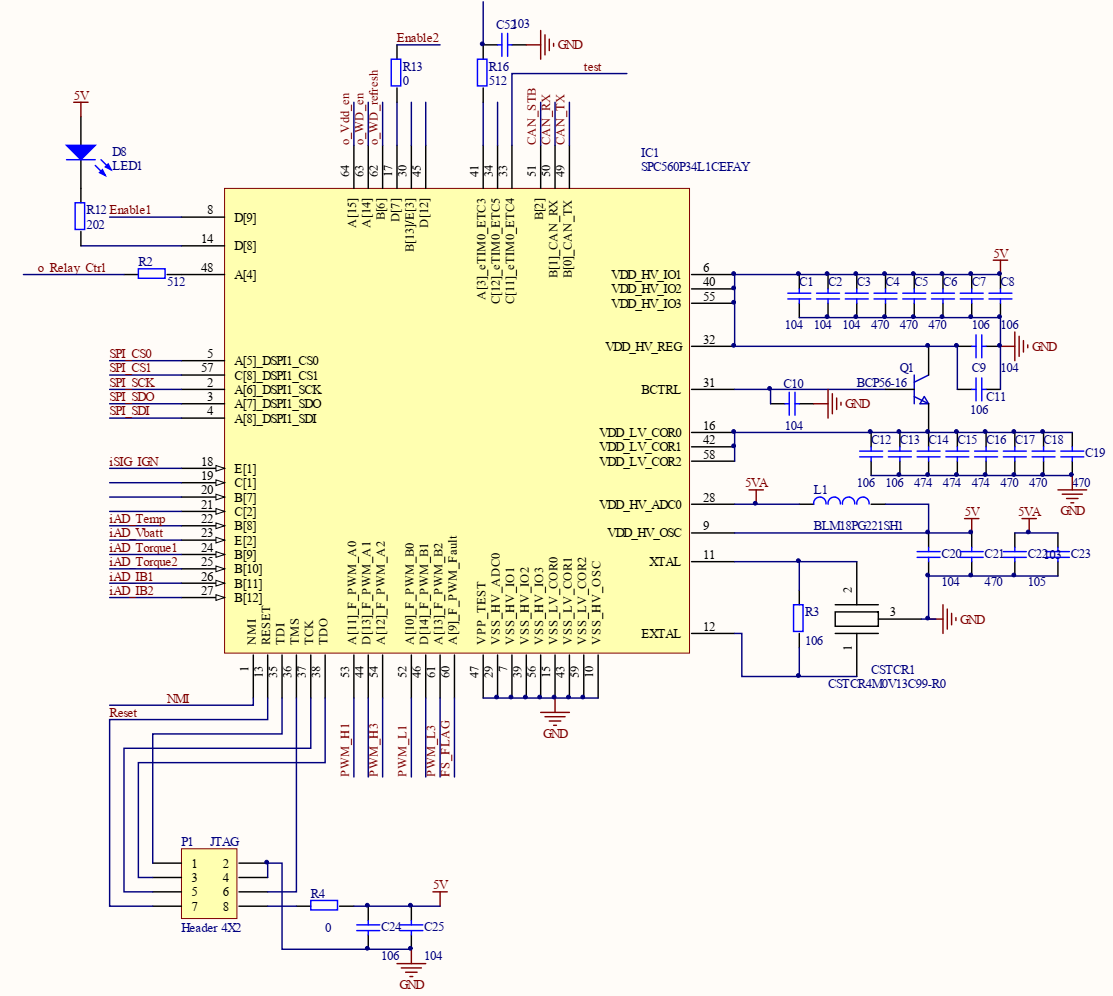
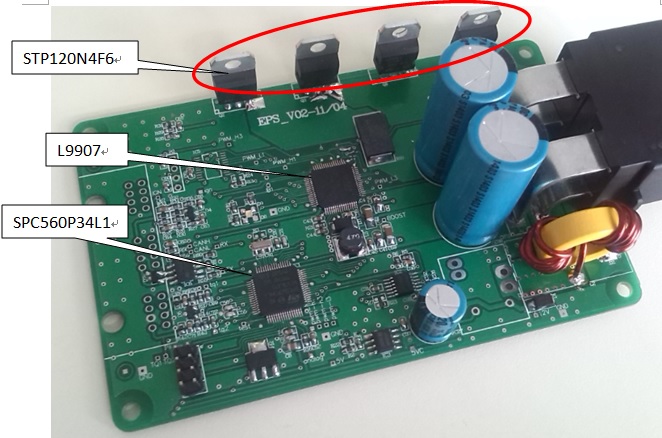
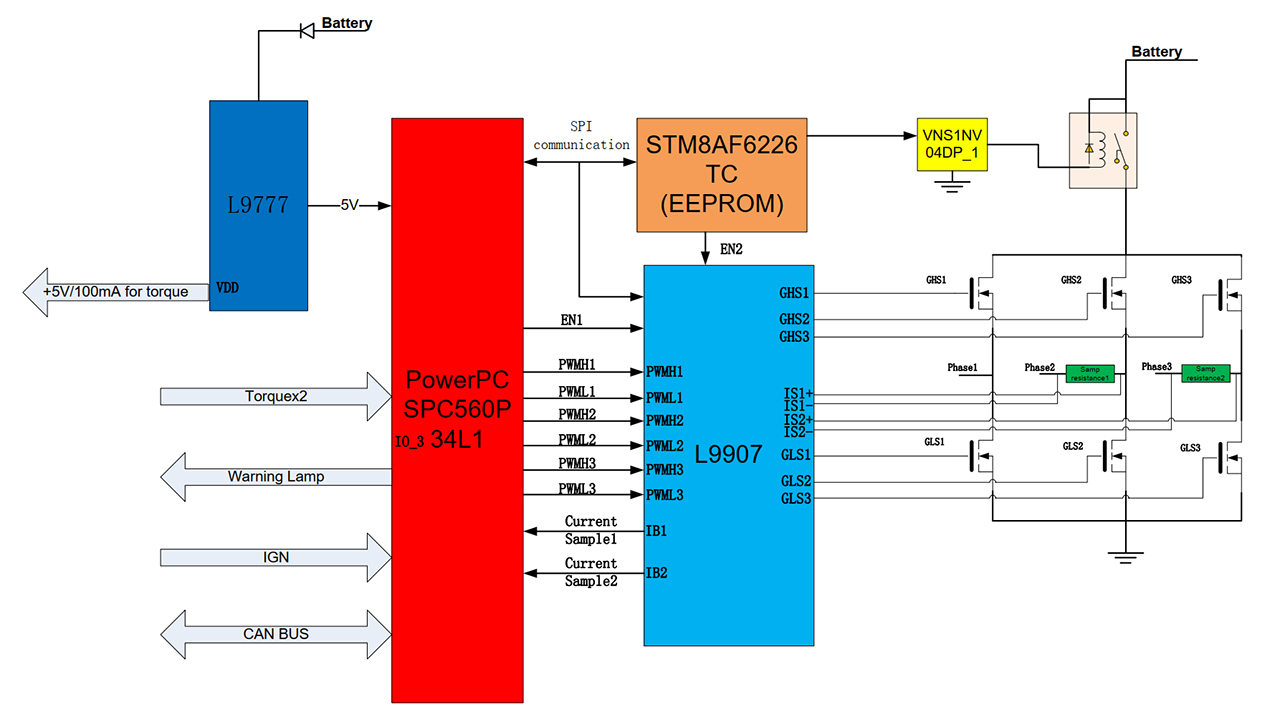
① 主控MCU:本方案採用ST PowerPC SPC560P34L1,是核心算力器件。負責對外部扭力傳感器信號、車速、發動機轉速信號採集,同時計算驅動策略和PID控制算法。
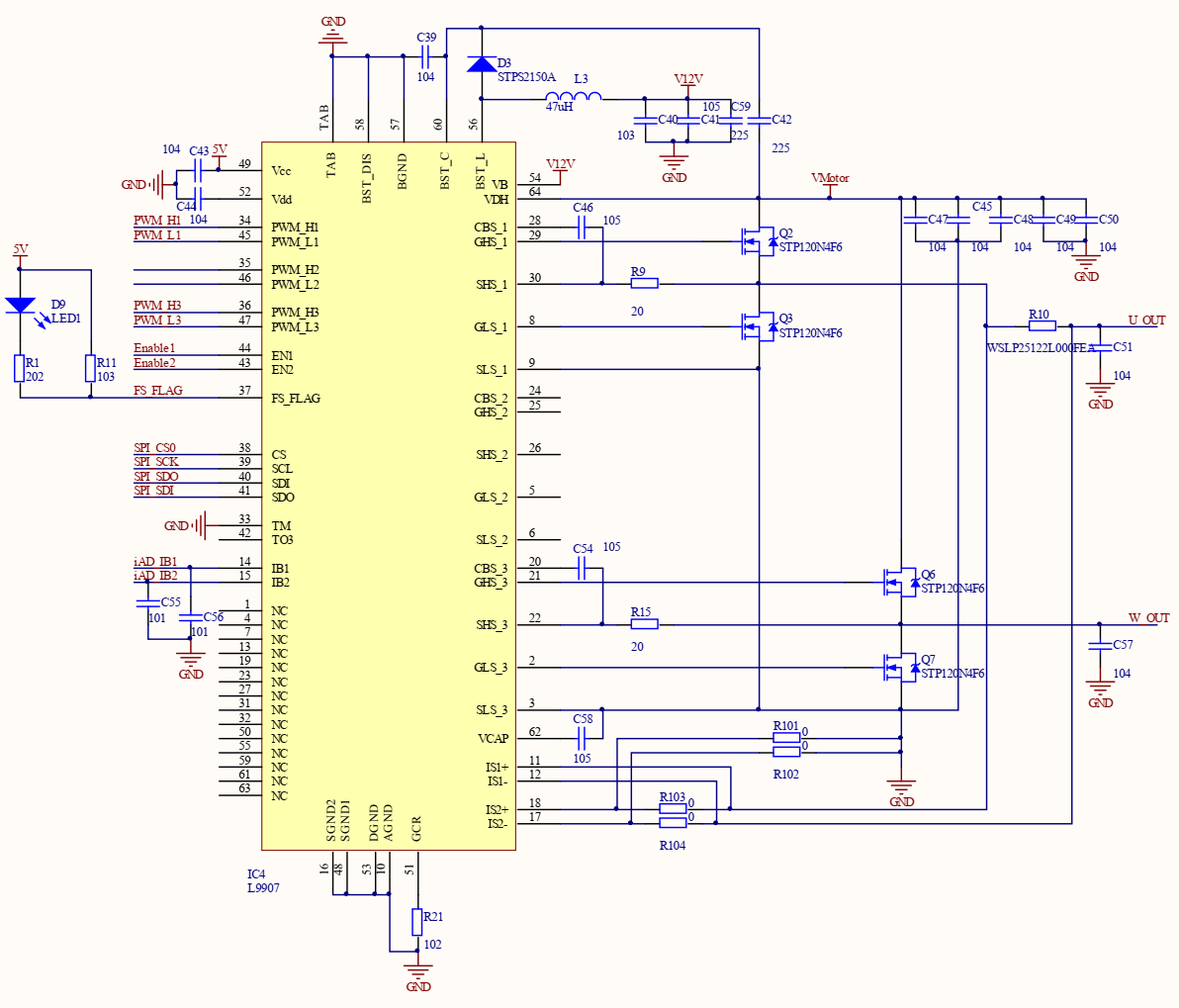
②驅動部分:ST L9907具備三相predriver,H橋(DC電機驅動)或3H橋(BLDC或PMSM電機驅動)構架,同時具備SPI配置、校準和信息反饋,內置運放,可直接抓取來自電機的電流。配合低壓MOSFET STP120N4F6,組成一套完整的電機驅動/反饋電路
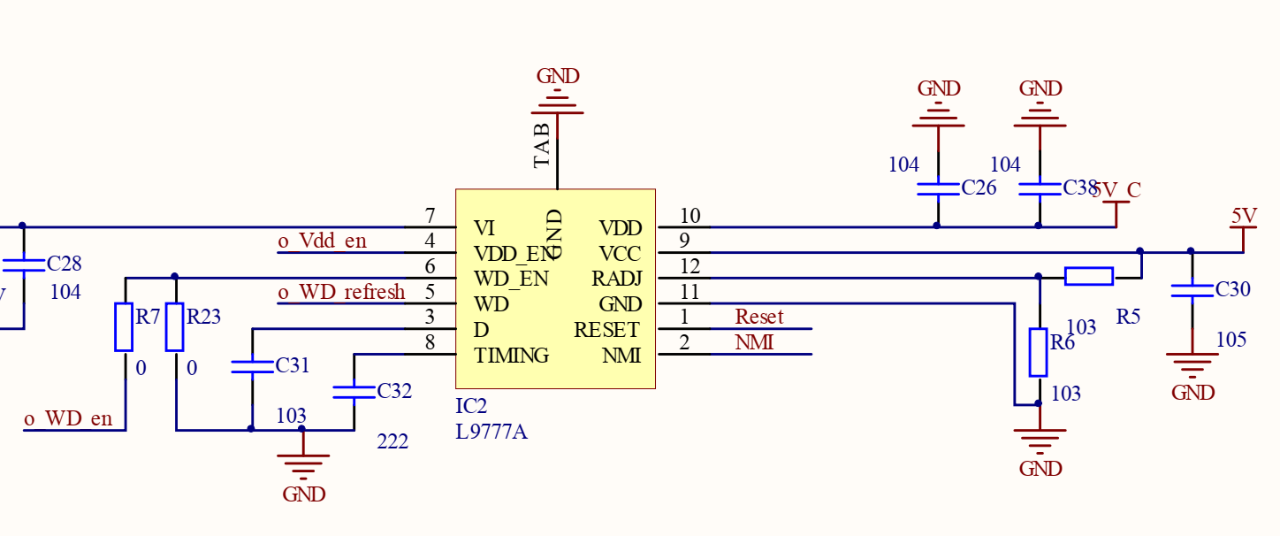
③ 電源系統:ST PM晶片L9777A可提供2路5V DC隔離輸出,一路供給內部邏輯電源,另一路供給外部sensor,這樣外部尖峰浪涌不易影響到板內元器件,以應對車載複雜的電源條件。
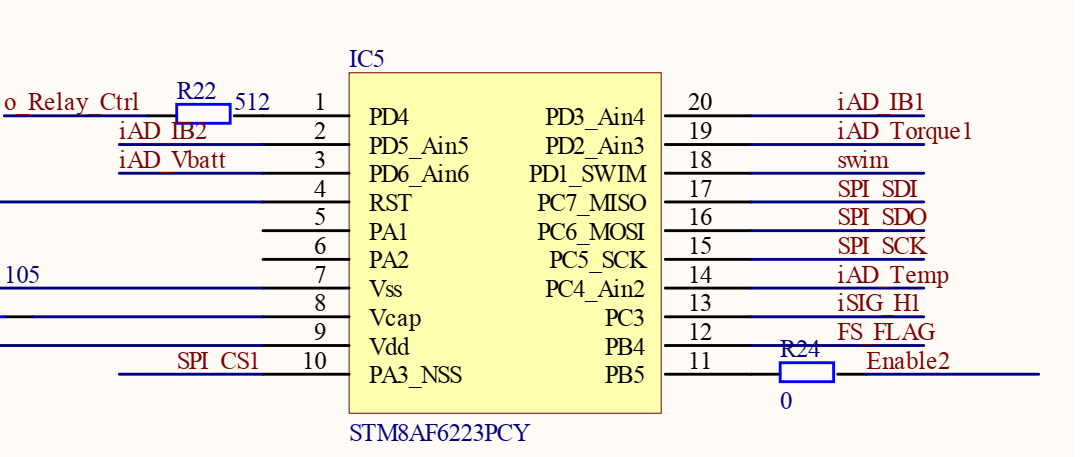
④輔助MCU:增加一顆汽車級8bit MCU STM8AF6223,做整機電源管理和策略監控,一旦遇到故障,可以採取必要的應對措施,以保護車輛和駕乘人員安全。
①電機需要跟隨駕駛員轉向意圖和轉向速度,提供相同方向矢量的助力。這需要實時分析扭矩傳感器信號並快速計算出PID控制策略
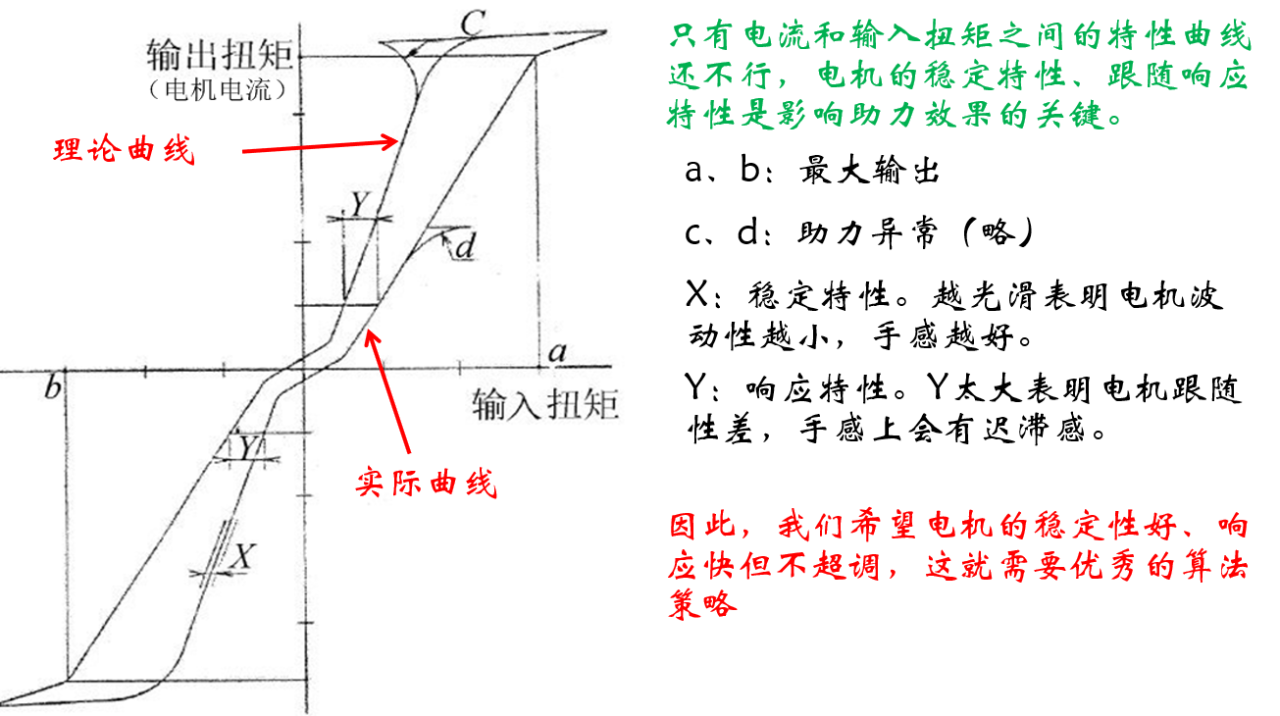
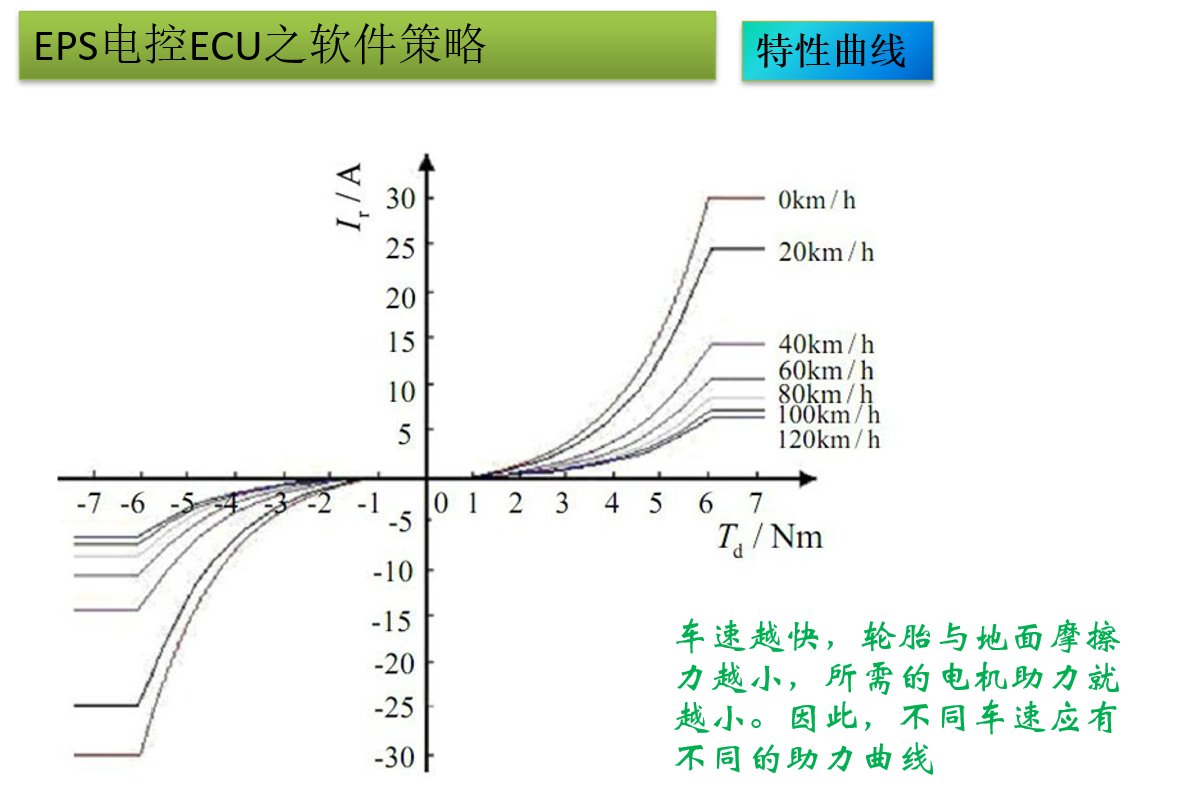
②在不同車速下,電機提供助力的扭矩是不一樣的,理論上車速越快,所提供的助力越小。車速超過60~80Km/h,電機甚至需要提供阻尼以應對方向盤過輕、跑偏的狀況。這使得整個助力是一個變化的曲線,需要優秀的控制算法
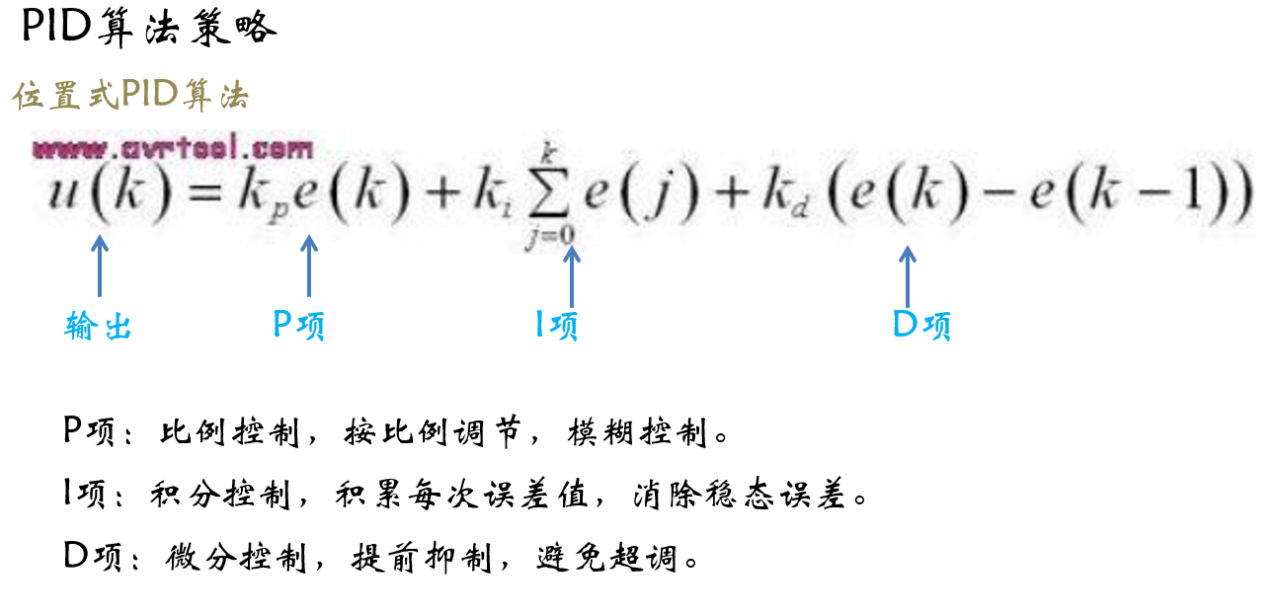
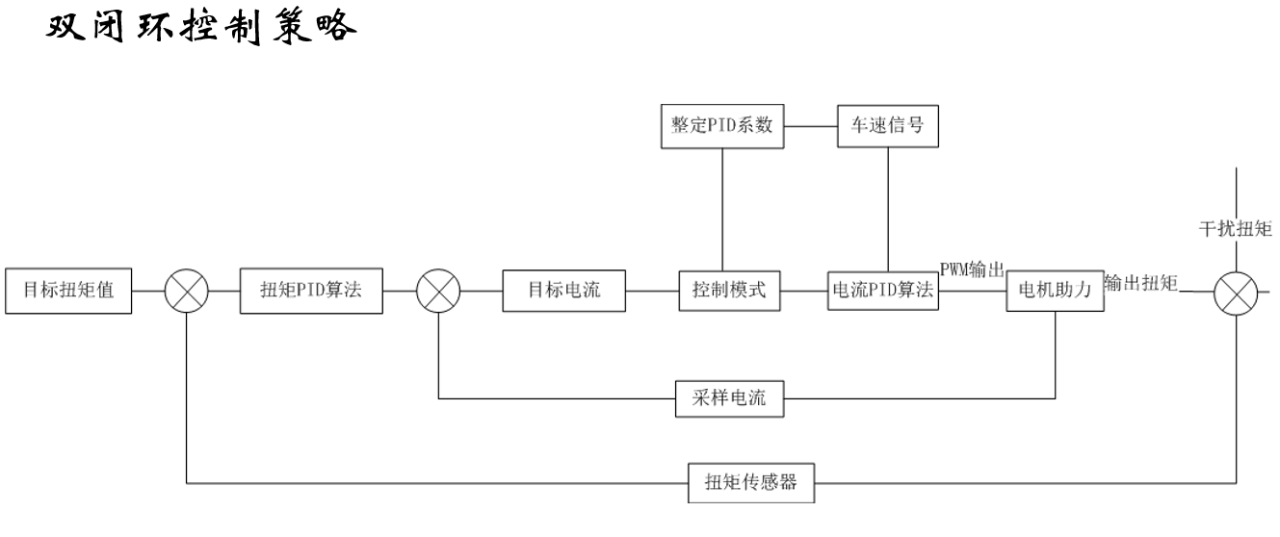
③ 核心PID以及閉環控制算法:通過數學工程PID算法、以及做電流閉環、扭力閉環控制,是電機控制策略的核心關鍵。優秀的算法,往往可以使電機驅動更平滑、助力迅速跟上但不超調,駕駛體驗非常好

最早是純機械轉向,駕駛員打轉車輪需要克服前輪帶來的強大摩擦力力,使得駕駛機動車十分吃力。上世紀50年代,液壓助力(HPS)轉向系統應用在汽車上,標誌著轉向助力的開始。在HPS助力下,駕乘體驗有了質的飛越,但是HPS弱點在於成本高、維修難且增加油耗。後來又經幾代人的努力,轉向系統從液壓助力(HPS)到電子液壓助力(EHPS),再到如今的純電動轉向助力(electrical power steering,簡稱EPS),80年代,日本鈴木首先在其車型上使用EPS轉向助力,標誌著電動時代的來臨。如今,幾乎所有乘用車都採用EPS轉向助力。它有以下幾個優點:
- 動力來源於電機,轉換效率高
- 隨車速調節助力大小、操控舒適、穩定
- 實現方向盤主動回正,且可通過CAN總線與車身其它部件組成車聯繫統,是智能駕駛、泊車的先驅
- 節約油耗3%~5%
- 正常情況下無需更換零部件,終生不維修
- 硬體原理
① 主控MCU:本方案採用ST PowerPC SPC560P34L1,是核心算力器件。負責對外部扭力傳感器信號、車速、發動機轉速信號採集,同時計算驅動策略和PID控制算法。
②驅動部分:ST L9907具備三相predriver,H橋(DC電機驅動)或3H橋(BLDC或PMSM電機驅動)構架,同時具備SPI配置、校準和信息反饋,內置運放,可直接抓取來自電機的電流。配合低壓MOSFET STP120N4F6,組成一套完整的電機驅動/反饋電路
③ 電源系統:ST PM晶片L9777A可提供2路5V DC隔離輸出,一路供給內部邏輯電源,另一路供給外部sensor,這樣外部尖峰浪涌不易影響到板內元器件,以應對車載複雜的電源條件。
④輔助MCU:增加一顆汽車級8bit MCU STM8AF6223,做整機電源管理和策略監控,一旦遇到故障,可以採取必要的應對措施,以保護車輛和駕乘人員安全。
- 軟體策略
①電機需要跟隨駕駛員轉向意圖和轉向速度,提供相同方向矢量的助力。這需要實時分析扭矩傳感器信號並快速計算出PID控制策略
②在不同車速下,電機提供助力的扭矩是不一樣的,理論上車速越快,所提供的助力越小。車速超過60~80Km/h,電機甚至需要提供阻尼以應對方向盤過輕、跑偏的狀況。這使得整個助力是一個變化的曲線,需要優秀的控制算法
③ 核心PID以及閉環控制算法:通過數學工程PID算法、以及做電流閉環、扭力閉環控制,是電機控制策略的核心關鍵。優秀的算法,往往可以使電機驅動更平滑、助力迅速跟上但不超調,駕駛體驗非常好
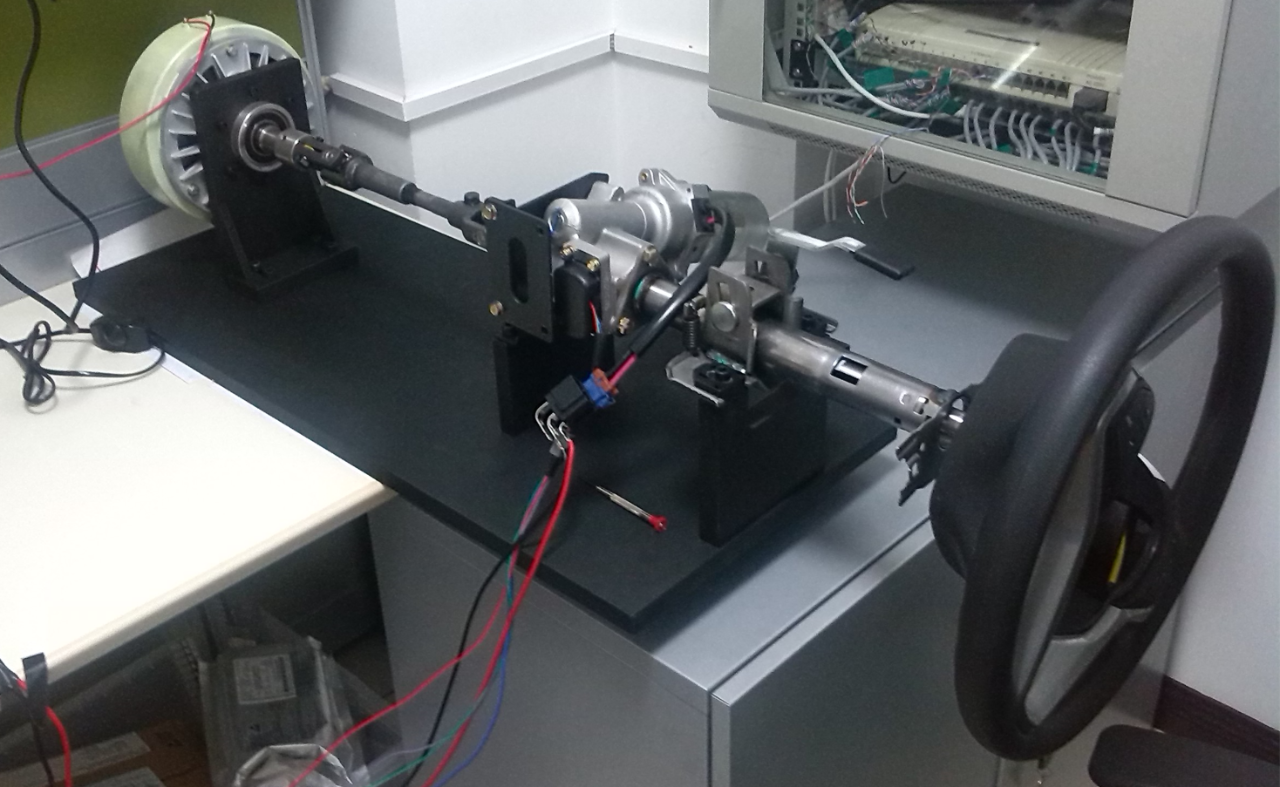
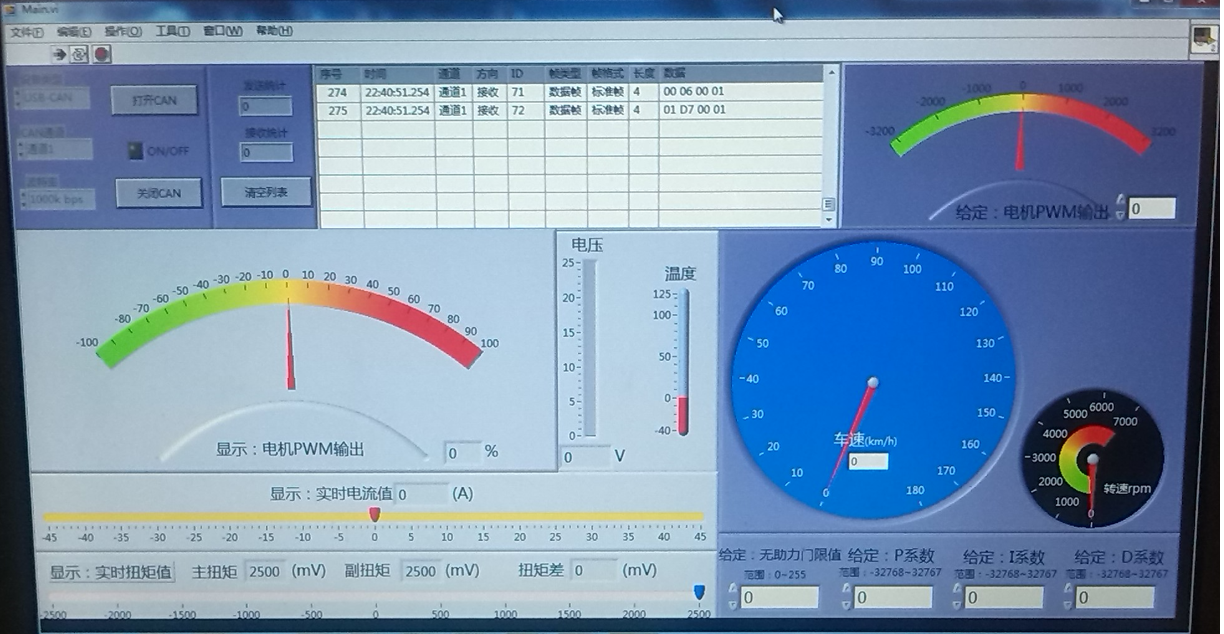
- 試驗台架與人機界面
►場景應用圖
►產品實體圖
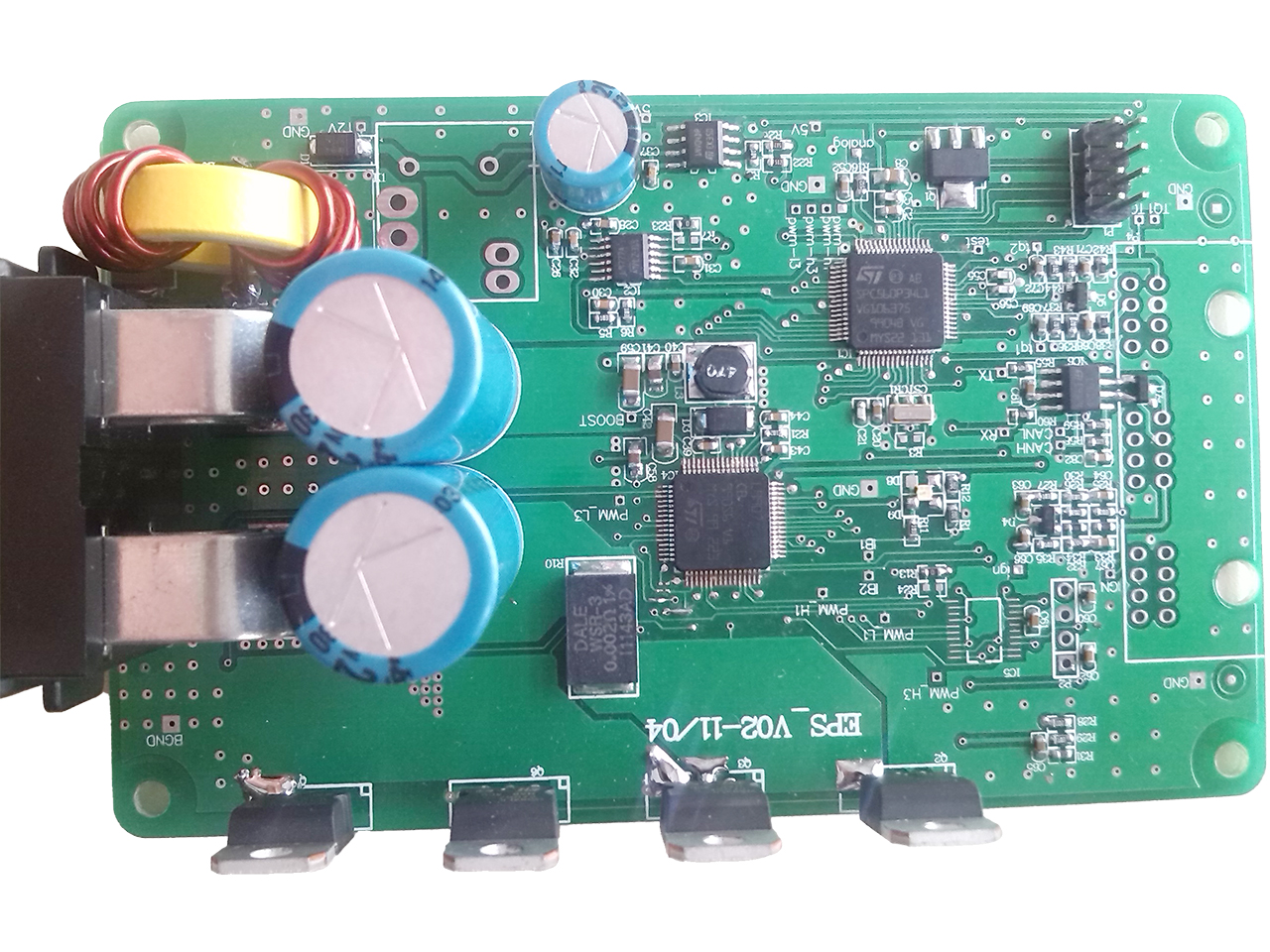
►展示板照片
►方案方塊圖
►核心技術優勢
擁有比其它32bit MCU更多的對Timer控制策略,實現DC/BLDC/PMSM精確控制 獨立控制(助力、主動續流、阻尼、鎖定) 雙向放大4MHz帶寬增益可調 可實現BLDC雙橋臂採樣 ,速度快,可檢測正負電流,倍數可調 運放帶offset算法補償,使採樣精度更高 獨立5V供外部扭矩傳感器。內外電源獨立,不受影響
►方案規格
SPC560P34L1: 汽車級PowerPC e200z0h內核,64MHz主頻 AEC-Q100 8ch獨立/互補通道PWM,16bit精度 擁有比其它32bit MCU更多的對Timer控制策略 L9907: 6~54V適壓,可靠性高 6ch PWM Prediver能力:600mA 2ch內置運放:雙向放大4MHz帶寬增益可調 SPI可配置offset補償 L9777A: 輸入範圍5.6~31V / 150mA/100mA雙路驅動能力 獨立5V跟隨