

近年來,無刷直流電動機在現代社會的眾多領域中得到廣泛應用,包括電動汽車、家用電器、辦公自動化、工業控制、醫療器械等領域都有它的身影。它除了保持有刷直流電動機優越的啟動性能和調速性能外,其最大的特點就是沒有換向器和電刷組成的機械接觸結構,因而具有低損耗、高效率、壽命長、噪聲低、運行可靠、維護簡便等一系列優點。
雖然無刷直流電機有諸多優點,但是在控制上卻有一定難度。無刷直流電機的機械結構簡單,這就要求驅動電路要有一定的複雜度,並且需要由 MCU 產生電機所需要的波形來控制電機的轉動。
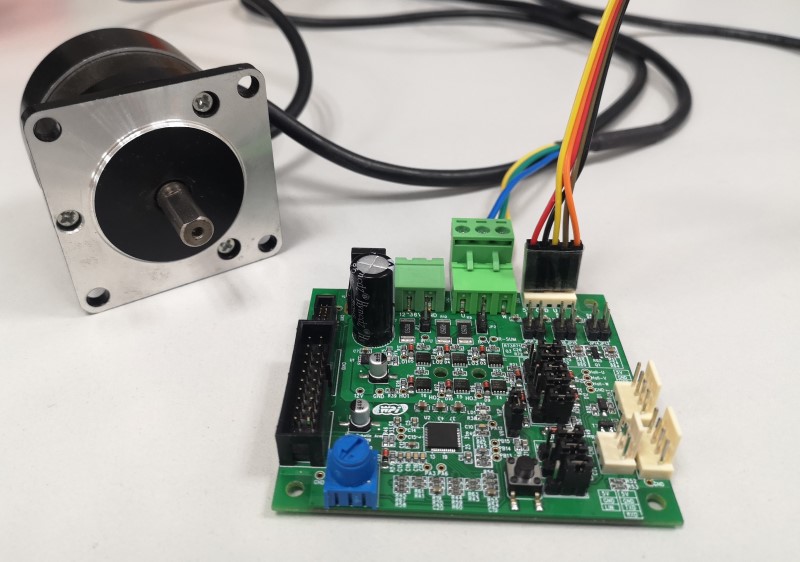
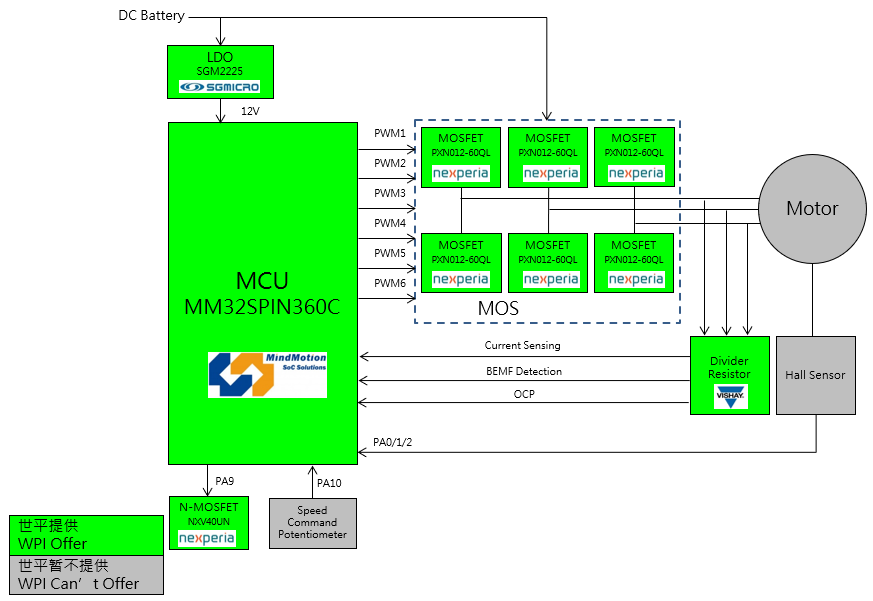
大聯大世平集團針對低壓無刷電機,推出基於靈動微 MM32SPIN360C 的無刷電機驅動方案。此方案採用的 MM32SPIN360C 內部集成了一部分驅動電路,所以方案的外圍電路比較簡單。適用於多種應用場合,比如空氣淨化器、服務器風機、吊扇、落地扇、電動手工具、吸塵器、無人機電調、小型水泵等。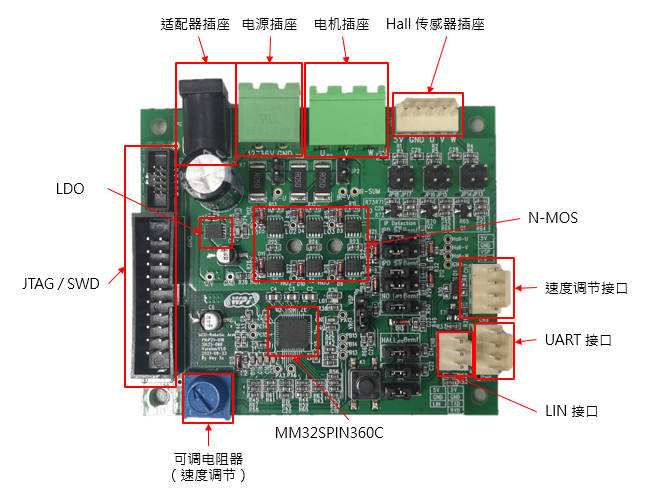
圖 1 . 世平 MM32SPIN360C 無刷電機開發板
關鍵元器件介紹:
- 主控
主控 MCU 採用的是 靈動微 MM32SPIN360C,使用高性能的 ARM Cortex-M0 為內核的 32 位微控制器,最高工作頻率可達 96 MHz,內置高速存儲器,豐富的 I/O 埠和多種外設,包括:
- 128KB Flash,12KB SRAMB
- 包含 12 位的 ADC,採樣速度高達 1Msps
- 5 個通用定時器、2 個針對電機控制的 PWM 高級定時器
- 1 個 I2C 接口、2 個 SPI 接口和 2 個 UART 接口
- 針對電機應用內置 3 個運放,3 個比較器
- 內嵌經出廠調校的 48MHz 高速振盪器
- 內置預驅工作電壓 7V ∼ 48V
- 5V LDO 穩壓器,輸入電壓最高 13.5V
- 提供 QFN48 封裝
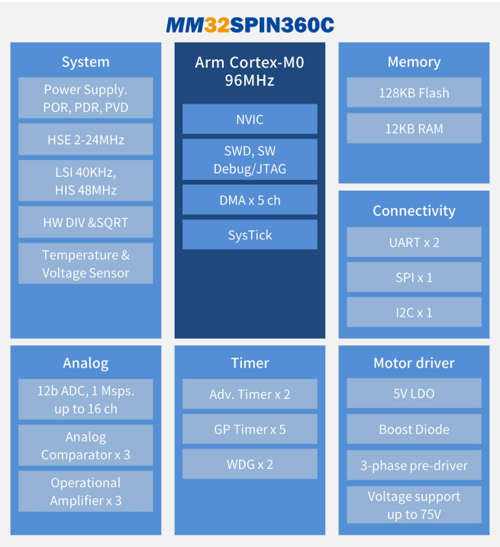
圖 2 . 靈動微 MM32SPIN360C 框圖
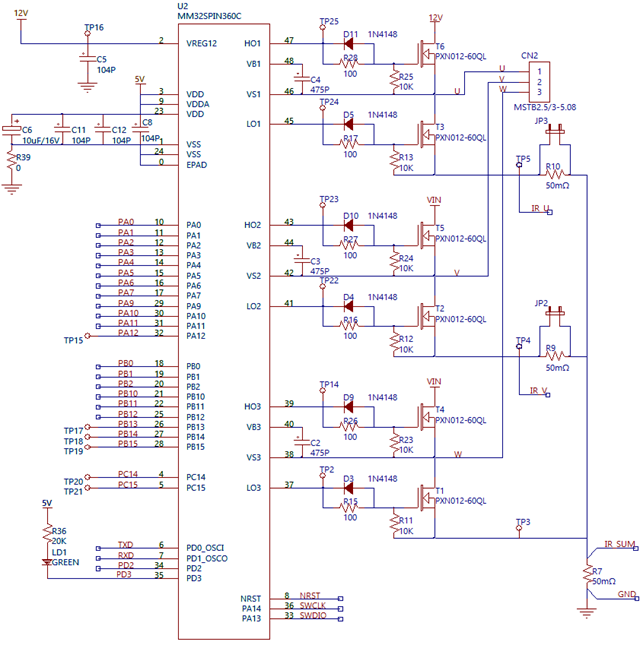
- N-MOSFET
電機驅動部分,方案採用 6 顆 N-MOS 管來做電機的電子換相控制。晶片採用的是 Nexperia 的 PXN012-60QL。PXN012-60QL 體積小、功耗低、漏源電壓(VDSS)可以達到 60V,連續漏電流(Id)可以達到 42A,開關頻率可以達到 30KHz 以上。
- 電源
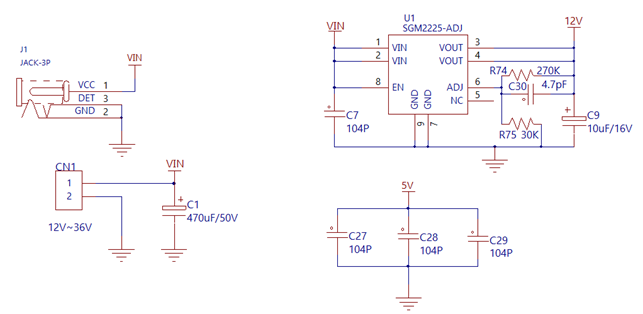
方案採用的電源晶片是聖邦微的 LDO: SGM2225-ADJ,其特點如下:
- 寬電壓輸入 Vin:3.6~36V
- 輸出電壓可調 Vout:1.8V~15V
- 最大輸出電流 Iout:800mA
- 低噪音、低損耗電壓
- 封裝小,最小封裝大小為 3*3mm
- 過流/短路保護
- 過熱保護
- 工作溫度範圍:-40~+125℃
驅動軟體說明:
方案的軟體部分採用靈動微的 FOC 軟體庫架構,整個軟體結構清晰易懂。軟體採用雙環控制(電流環+速度環),矢量控制的框圖如下圖所示:
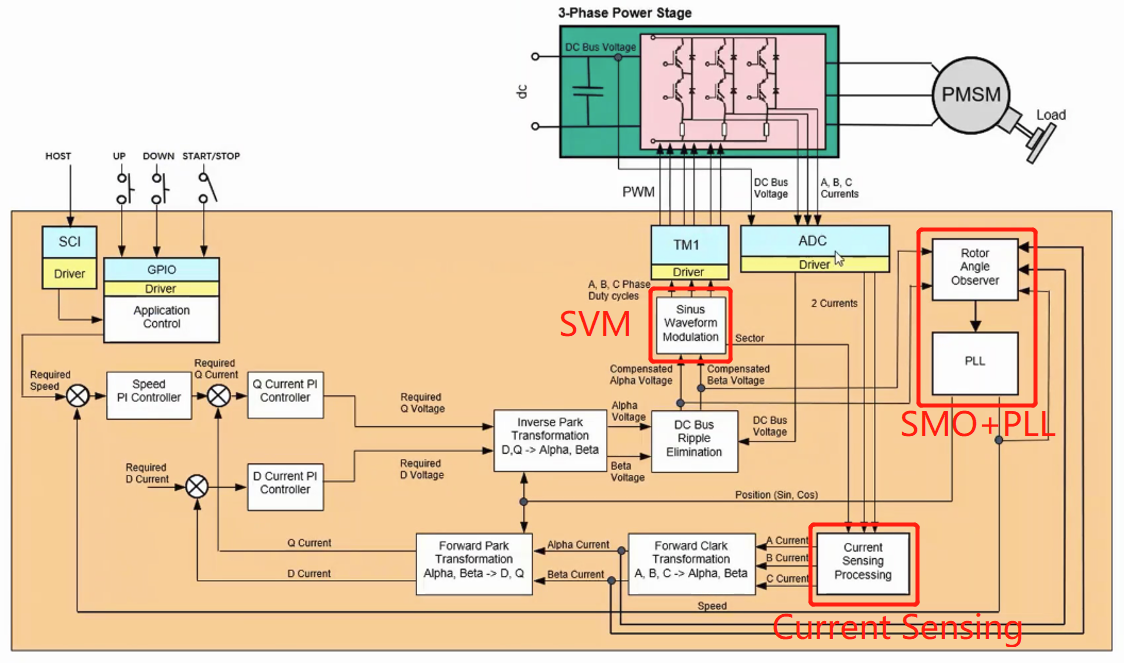
圖 3 . 電機矢量控制框圖
- SVM
空間矢量脈寬調製(SVM)是 FOC 的基礎,是根據其所在扇區選擇非零矢量與零矢量合成而成,有五段式、七段式、混合式。七段式開關次數較多,但諧波較小;五段式開關次數是七段式的一半,但諧波較大。
代碼採用的是七段式。其實現流程大致如下:
① 判斷合成矢量所在扇區
② 計算相鄰矢量作用時間
③ 計算各橋臂導通時間
④ 得到各相PWM占空比
⑤ 更新相應寄存器值
- Current Sensing
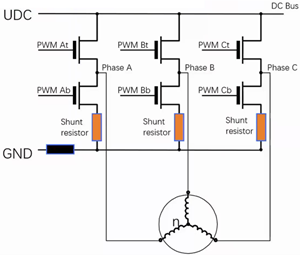
圖 4 . 電流採樣原理
- SMO+PLL
在速度環,軟體採用基於滑膜觀測器(SMO)和鎖相環(PLL)方法對電機轉子的速度估計與控制。
- 軟體架構介紹
靈動微的 FOC 軟體結構如下圖所示,這套軟體具有如下特點:
① 時序清晰 —— 僅使用一個常用中斷,減少可能的時序衝突和 BUG。
② 便於移植 —— 算法層、驅動層、數學庫完全獨立,軟硬體配置完全剝離,互不干擾。
③ 定標統一 —— 統一 Q15 小數定標。
④ 函數模塊化 —— 邏輯清晰的狀態機,簡潔明了的狀態切換。
⑤ 配置方便 —— 主要參數配置意義明確,可視化
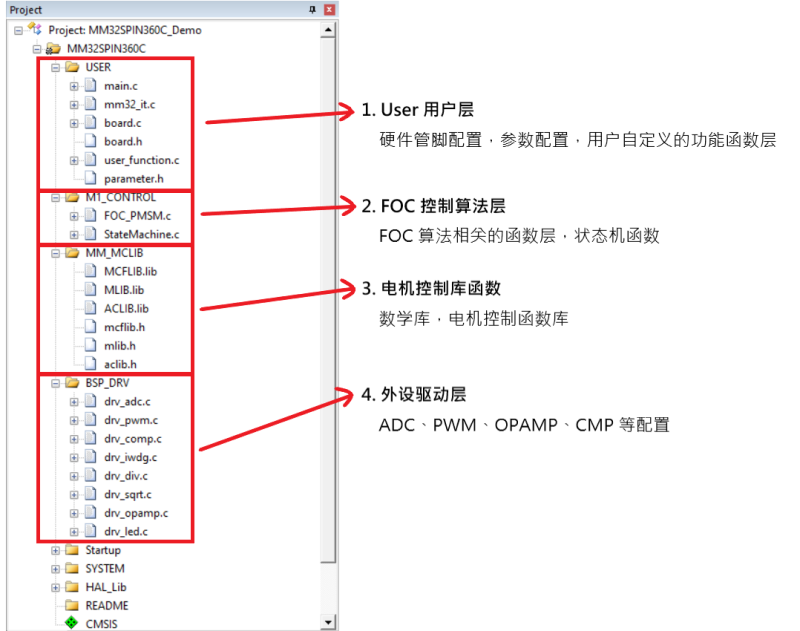
圖 5 . FOC 軟體結構
►場景應用圖

►產品實體圖
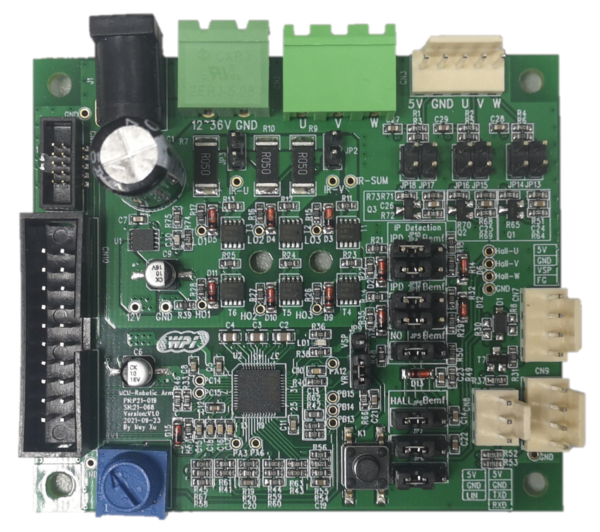
►展示板照片
►方案方塊圖
►方案原理圖 —— 電源部分
►方案原理圖 —— MCU 部分
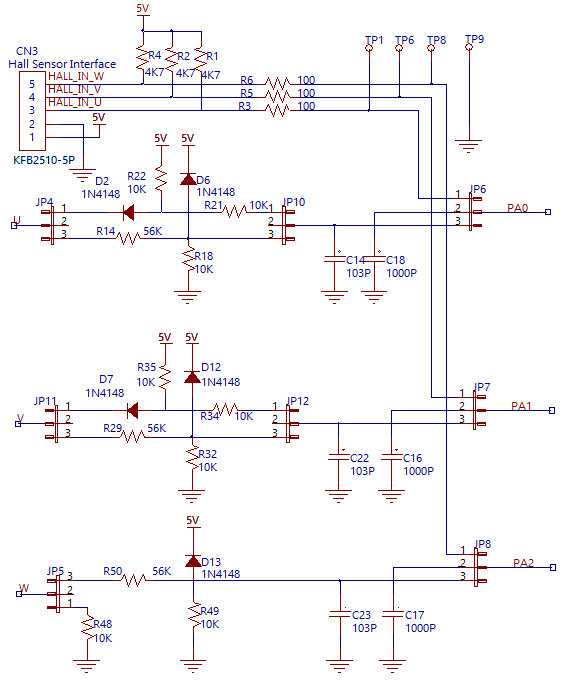
►方案原理圖 —— 傳感器部分
►方案 PCB —— Top layer
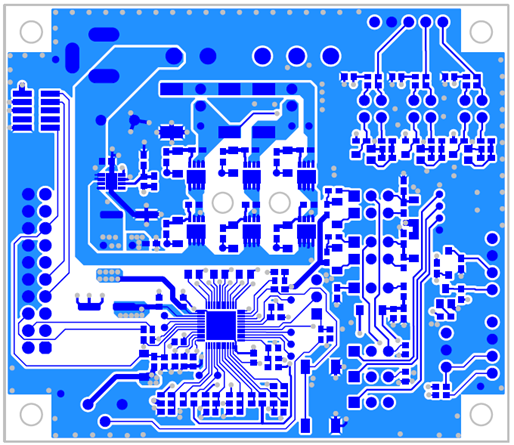
►方案 PCB —— Bottom layer
►核心技術優勢
1. ARM Cortex-M0 32 位 MCU,主頻高達 96 MHz,內置預驅、比較器和放大器,整個驅動電路簡單 2. MCU 電源使用 5V,可由 MCU 內部 LDO 轉換 3. 支持有傳感器/無傳感器的 BLDC/PMSM 電機 4. 支持 1/2 Shunt R 三相電流採樣 5. 可通過跳線選擇不同的電機回授方式,比如:HALL、BEMF、IPD 等 6. 支持 DC Bus 電壓, 總電流量測 7. 使用 MCU 內建比較器作為過電流保護
►方案規格
1. MCU: ARM Cortex-M0 32-bit 內核,主頻高達 96MHz 2. MCU 電源使用 5V,可由 MCU 內部 LDO 轉換 3. 支持 UART 通訊 & LIN 通訊 4. 支持 2 種電源輸入接口:DC-Jack 和接線端子 5. 使用 60V/40A N-MOS 管 * 6 6. 支持 2 種 SWD 調試接口 7. 支持 2 種調速接口:電位器和外接電壓 8. 具備 LED 指示燈 & 按鍵 9. 開發板尺寸 : 65 * 75 mm