

随着生活水平的提高,我们也越来越注重家居的生活品质,此时智能产品也不断出现在我们的生活当中,大到选购家具橱柜小到家用电器,都会格外用心,以达到提升家居质感。而智能家居领域中的扫地机器人,无疑具备了这种时尚又实用的特质,受到越来越多的消费者的喜爱和认同。
扫地机器人的基本功能是清扫、吸尘、拖地,通过对于清扫毛刷的材料、结构形式、旋转方式,以及拖布材料、供水量、拖布布置方式等功能实现了更好的清洁效果,除此基本功能外,较新的产品向“智能家居”转型发展。其智能化发展分为两个阶段。第一阶段实现扫地机器人与智能设备的互联互通。第二阶段是扫地机器人通过传感器观测环境中的信息,实现机器人自主导航定位,完成一站式的智能清扫方案。导航系统在机器人产品中的大幅应用提升了扫地机器人的智能化程度。
尽管扫地机器人具备种各种优势,但在中国的使用率仍然不高。有数据调查显示美国家庭扫地机器人的使用率在16%,中国沿海地区扫地机器人的使用率只有不到5%,内陆地区则仅为0.5%。而与扫地机器人形成互补和替代作用的则是洗衣机和吸尘器,在中国家庭里洗衣机的使用率将近90%,家用吸尘器也达到了30%—40%。所以扫地机器人市场在中国乃至世界还是有很大的发展空间。
►场景应用图
►产品实体图

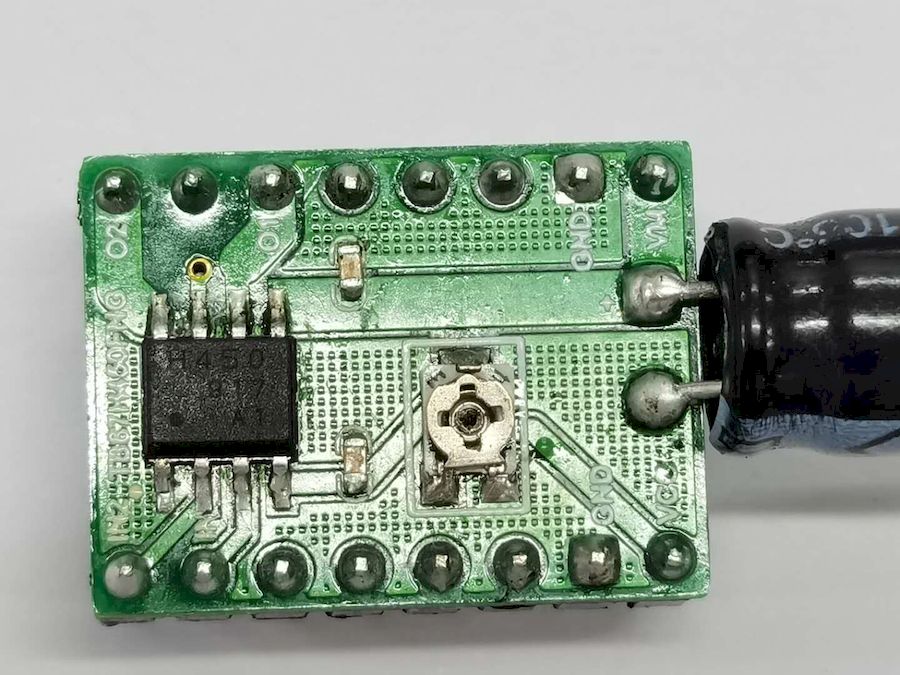
►展示板照片

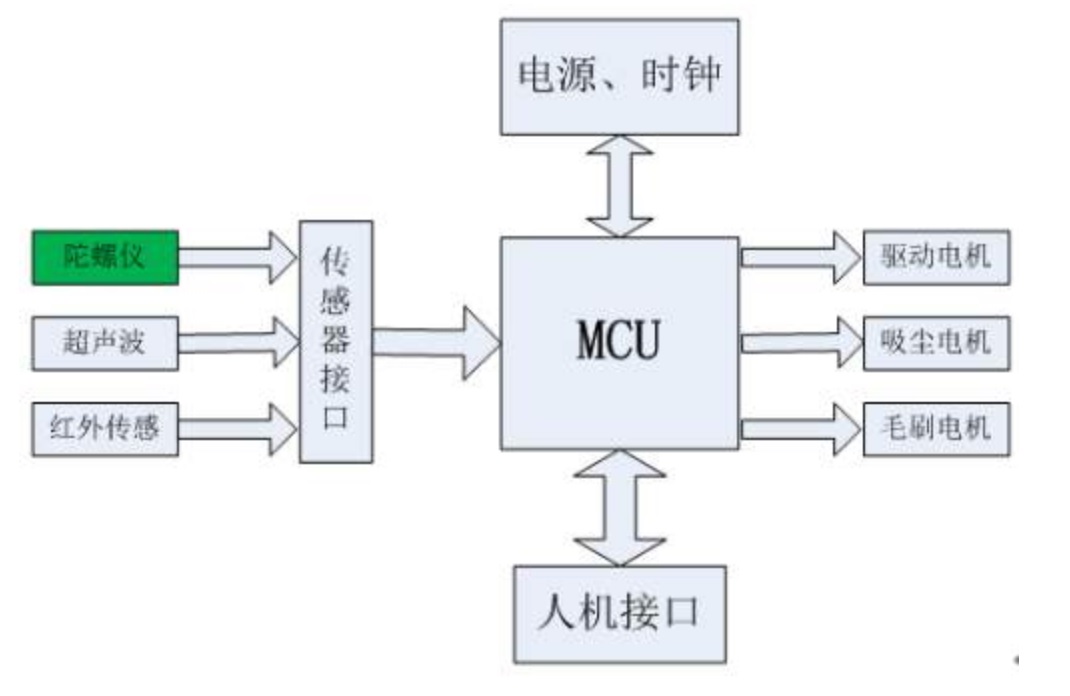
►方案方块图
►核心技术优势
1、 采用东芝度独有的BiCD工艺制造。 2、 支持正向/反向/制动/停止四种工作模式。 3、 内置多种错误检测功能(热关断TSD、过流检测ISD和欠压锁定UVLO)。 4、 内置VCC稳压器,用于内部电路工作等等。
►方案规格
1、 工作电压范围更广4.5V-44V(同行业里TI的DRV8870在4.5V-44V,而Allegro的A4950只有8V-40V)。 2、 额定输出电压最大50V,最大电流3.5A(与行业TI的DRV8870一样,而高于Allegro的A4950的40V/3.5A)。 3、 待机电流低至1uA(同等型号行业里TI的DRV8870和Allegro的A4950都在10uA)。 4、 内置带低导通电阻输出MOSFET(高压侧+低压侧)RDS(H+L)低至0.6Ω—0.8Ω。 5、 内置多种错误检测功能,如热关断(TSD)*自动恢复:当IC的结温达到TSD的阈值150℃-175℃时,触发TSD电路,当结温降低到要返回的温度时,IC自动返回。此功能电路用于检测热误差的后背功能,因此不建议经常使用。 6、 过流检测(ISD): 当输出电流达到阈值4.1A-5.7A时,就会触发ISD电路,然后内部复位电路关闭输出晶体管,将集成电路设置为待机模式,需重新建立VM电源或设置待机模式后才能恢复操作。此功能Toshiba有两种模式的型号供客户选择。一颗是和Allegro的A4950一样待机后需手动恢复才能工作的TB67H450FNG,而另一颗是和TI的DRV8870一样待机后可以自动恢复工作的TB67H451FNG。 7、 欠压锁定(UVLO):当VM脚的供电电压为3.8V或更低时,触发内部电路,内部复位电路关闭输出晶体管,触发UVLO后,将VM电源电压重新设置为4V或更高即可清楚UVLO,使产品正常工作。 8、 TB67H450FNG/451FNG的封装采用是HSOP8(4.9*6mm)封装,为了方便散热,芯片底部设有PAD点,所以Layout请注意其它脚位焊盘的摆放,应注意输出、VM、GND的layout布局,谨防与芯片底部PAD出现短路现象,在元件摆放和布局中也应注意,因电源引脚(VM、RS、OUT1、OUT2、GND)脚会通过极大电流,Layout时要注意连接正确且布线需加粗,防止工作过程中出现运行错误导致元件毁坏。