

一、简介
在 PMSM 的 FOC 控制中,通常输入是直流电,经过一系列的变换后,产生三相正弦电压去驱动电机。
其中的关键是 SVPWM(Space Vector Pulse Width Modulation,空间矢量脉宽调制),直流电通过 SVPWM 控制产生三相正弦波产生旋转磁场带动转子转动。驱动三相 PMSM 的驱动和电机简略模型如图 1 所示。
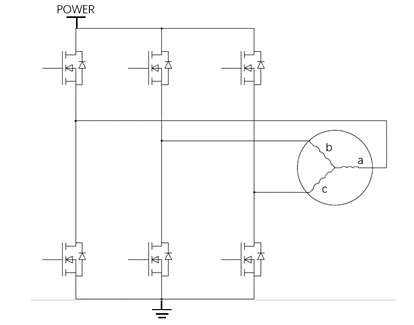 图 1
图 1
使用 1 代表半桥的上桥打开,下桥关闭。
使用 0 表示半桥的下桥打开,上桥关闭。
二、空间矢量
MOS 打开关闭即 a,b,c 相中有电压的状态组合就有八种,分别是
(000),(001),(010),(011),(100),(101),(110),(111)
其中(000),(111)合成的矢量为零矢量。
如果在某一时刻,为 100,即图 2 中状态,a 相上桥打开,b,c 两相下桥打开, Ua,Ub,Uc 三个矢量合成得到 Uref,并且可以计算得到 Uref 的模值为输入电压 Udc。
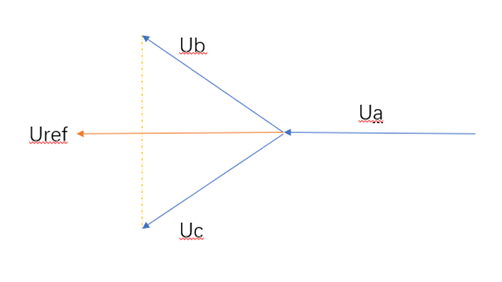
图 2
同样可以得到其他六种状态,除了零矢量外,其他的矢量模值都是 Udc
把八种开关状态产生的三相电压都做矢量合成,则有八个空间矢量如图 3 所示。
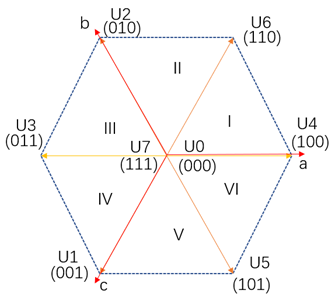
图 3
就目前这八种开关状态,可以产生八种不同的电压矢量带动转子转到 0degree,60degrees,120 degrees,180 degrees,240 degrees,360 degrees。分成六个扇区。
如果要生成落在各角度区间内的电压矢量,就要使用 SVPWM 技术。
SVPWM 就是利用这六个空间矢量加上两个零矢量合成任意角度的空间矢量。
原则就是落在哪个区域,就利用相邻的两个矢量和零矢量合成。
三、SVPWM
如图 4 所示,假设要合成落在扇区 1 的 Uref 矢量。
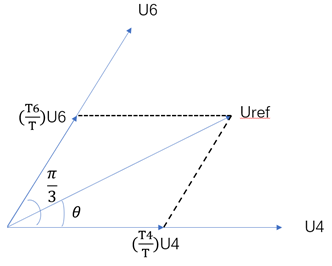
图 4
将 Uref 分解至 U6 方向和 U4 方向。
得到 Uref 在 U6 和 U4 两个方向的分量,其中 T 是控制周期,T6 和 T4 分别表示 U6、U4 在一个控制周期内保持的时长。由正弦定理可以得出以下式子:
在前面提到,U4,U6 的模值为 Udc,所以可以计算得到 T4 和 T6。
令
则

m 即为 SVPWM 的调制比。
在得出了 U6 和 U4 的保持时间之后,可以得出两个零矢量的时间。

通过以上方式就可以合成任意空间矢量。
在实际的应用中,为了减少 MOS 的开关次数,对一个周期内各个矢量保持的先后顺序做了一种巧妙安排。如上述的 Uref,在得出 T4、T6、T0、T7 后,对 a,b,c 三相半桥控制的开关控制顺序进行如图 5 中的安排。
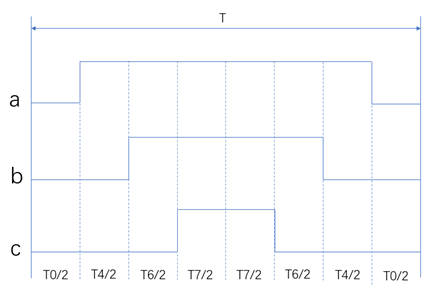
图 5
根据图 5,就可以知道这个控制周期内 a,b,c 三相的开关顺序依次是:
000、100、110、111、110、100、000
这里巧妙地做到了每次只有一相发生变化。
同理可得在其他扇区的开关顺序。
在 NXP 的无感 FOC 算法中,使用如图 6 的函数实现 SVPWM,每次计算得出三相半桥MOS 开关的占空比。

图 6
函数的输入是 Alpha,Beta 轴的电压,输出为 a,b,c 三相 PWM 的占空比。
四、小结
SVPWM 是 FOC 算法中的最后一个环节,前面的变换,如 Clarke、Park 也同等重要,更多细节可在 NXP 官网 FOC 的电机算法库文件中找到。
评论