

无刷直流电动机具有体积小、控制简单、效率高、稳态转速误差小以及维修保养简单等优点,在运动控制领域有着广泛的应用。无刷直流电动机的转子由永磁材料制成,定子由电枢绕组组成,绕组的相数最常用的有单相、三相和四相,每相绕组分别与电子开关电路相连接,电子开关电路中的功率开关管由位置传感器的信号控制。
单相无刷直流电机的基本结构下图所示: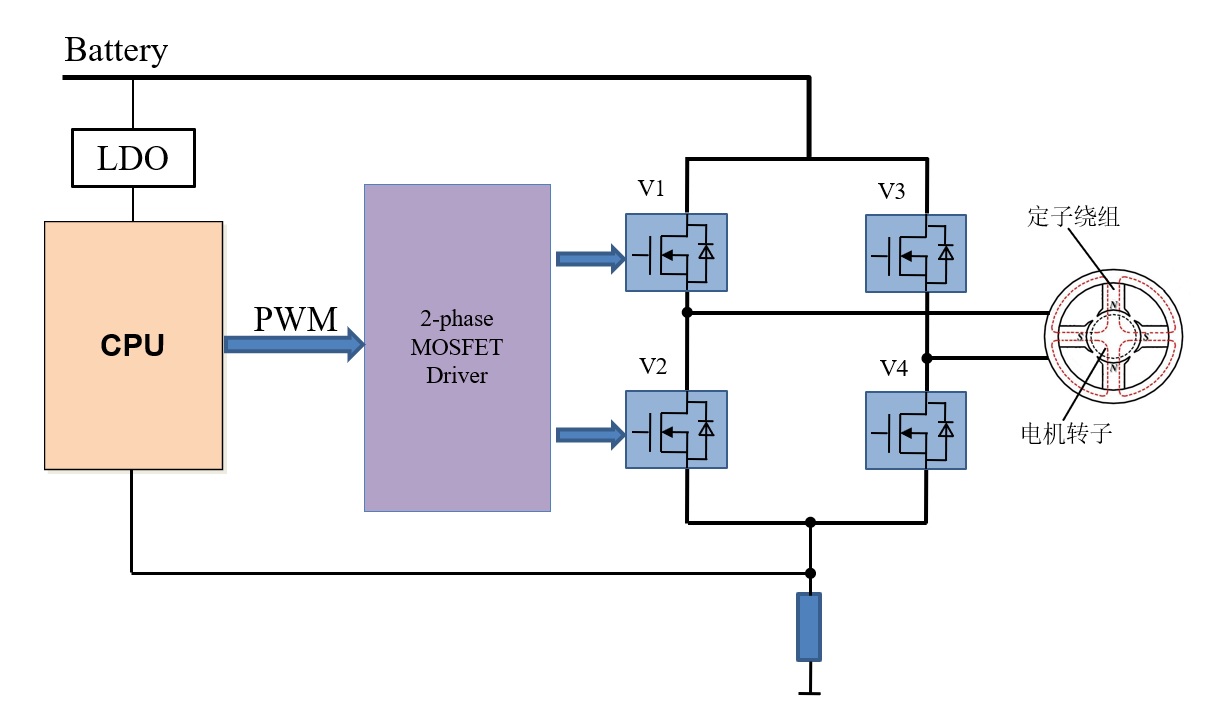
定子铁心由硅钢片叠装组成,铁心上设置了齿和槽,围绕每个齿分别用漆包线绕制成绕组;电机转子由磁钢组成,磁钢的磁极与定子的齿和槽相对应,霍尔器件用来检测磁钢的磁极信号。当电机转子位置变化时,霍尔器件的输出逻辑信号也相应变化,并由CPU采集霍尔传感器的输出信号,一般可以设定当磁极N转到靠近霍尔传感器时,霍尔传感器输出高电平信号,当磁极S转到靠近霍尔传感器时,霍尔传感器输出低电平信号。
通常情况下,单相无刷直流电机的PWM控制采用H-Bridge控制方式,驱动电路由4个功率器件V1、V2、V3、V4构成,功率器件的输出端连接到电机绕组两端,电机的位置信号由霍尔传感器检测,CPU检测到霍尔信号变化时来控制H-Bridge输出逻辑。正转时逻辑驱动电路给出开通信号控制功率器件V1和V4开通,V2和V3关闭;反转时控制功率器件V2、V3开通,V1、V4关闭,电流反向流通,换相点是通过检测霍尔传感器的状态实现,在霍尔传感器输出信号发生变化时改变开关逻辑来实现换相。电机转速控制是通过PWM输出信号来控制H-Bridge的4个功率器件实现的,改变PWM信号占空比可以实现电机调速,给定不同占空比可以得到不同的速度,利用定时器的捕获功能来记录电机每一圈的计数脉冲,这样可以得到电机实际转速。电流控制方面,CPU通过ADC采集Rsense电阻两端电压来实现。
在软件实现方面,通常采用速度PID和电流PID控制策略,速度环是电机控制系统的外环,其作用是控制电机的转速,使其达到既能调速又能稳速的目的,在负载变化时起抗扰作用;电流环是电机控制系统的内环,其作用是控制电机的电流,使其达到启动最快且保证不超出最大限制电流。
评论