

一部份信息表示,sensor的RGB数据排列如下图所示,部分行、列数据是一个无效的,只取中间有效像素( active pixel)部分,实际上 sensor 获取的数据也是如此存储的。 以 OV2740 为例,sensor 有 1936*1112 个感光点,中间可输出的有效像素点有 1936*1096 个。 而最终输出的像素点为 1920*1080 个,其余边缘的像素点可用来做其他处理后续。 每个像素点上实现到RGB颜色中的一种,部分感光点数据被视为无效。 通过 AMP 放大、 ADC 转换,输出 RAW 数据到 DSP 。
两种缩放模式
我们都知道,一般图像传感器的不同分辨率都匹配着不同的'多'多'多'的多'多'。 如果想要提高'多亿率',就要考虑是否需要两人。 若不希望视野被减,就需要减小分辨率(resolution)。 常用的减少分辨率的两种采样方式是: Skipping 和 Binning。
1、Skipping。
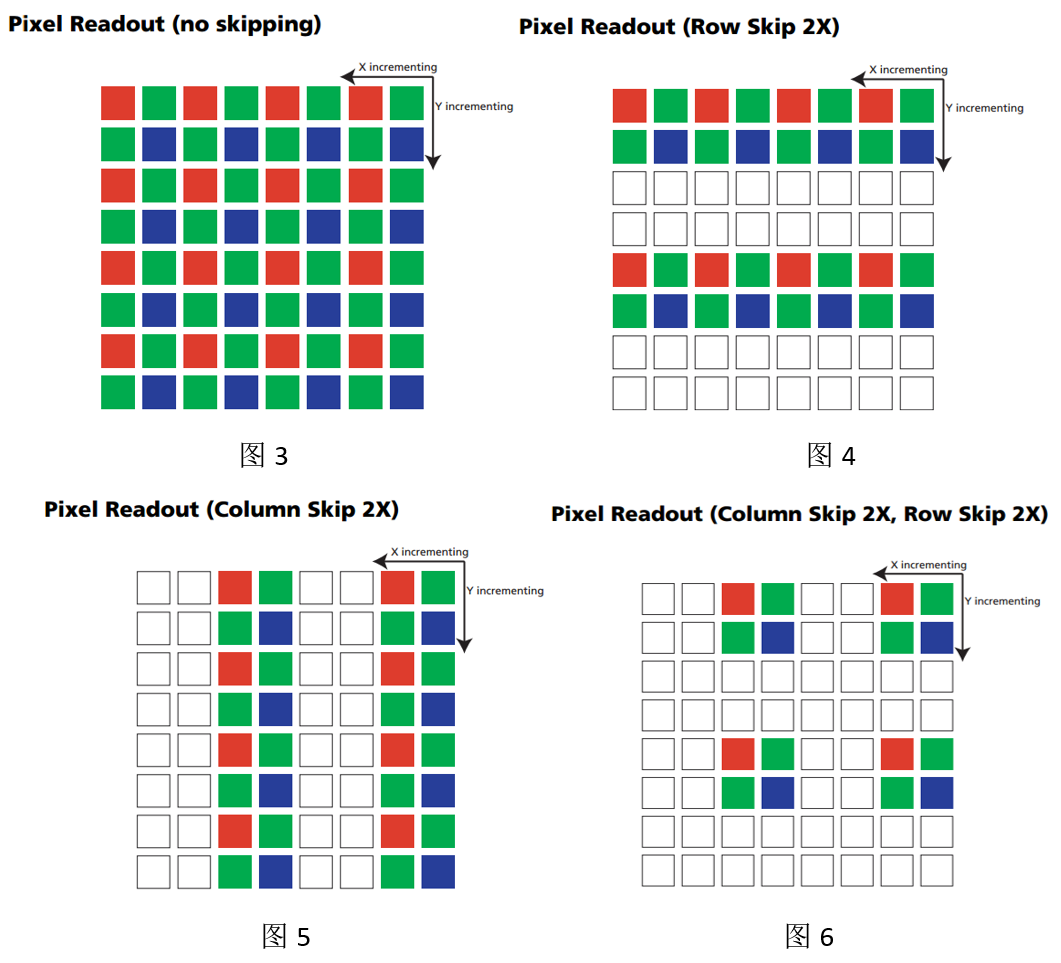
在 Skipping 模式中,通过选取视野中的像素点,抽取指定像素点来降低分辨率。 它不会对所有行列的像素点进行采样,这样才能降低图像的分辨率,行列数据是成对读取的。 下图公式是用于计算 Skipping 的大小、原始图像的大小和输出图像大小间关系。

可参考下图理解 Skipping 的不同设置:图 3 为未 Skipping 采样的原始像素阵列,图 4 为仅行取样的像素阵列,图 5 为仅列取样的像素阵列,图 6 同时行、列取样的像素阵列。
2、Binning。
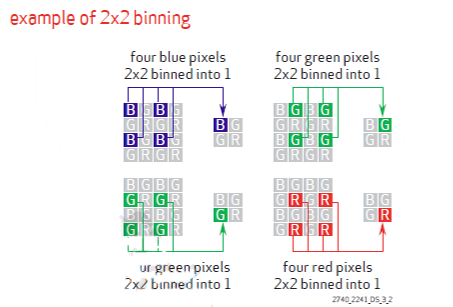
Binning 是一种图像读出模式,将相邻的像元中感应的电荷被加在一起,以一个像素的模式读出。Binning 分为水平方向 Binning 和垂直方向 Binning ,水平方向 Binning 是将相邻的行的电荷加在一起读出,而垂直方向 Binning 是将相邻的列的电荷加在一起读出。
Binning 这一技术的优点是能将几个像素联合起来作为一个像素使用,在维持视场角( FOV )不变的同时,降低输出分辨率,增加感光面积,提高暗处对光感应的灵敏度。而当行和列同时采用 Binning 时,图像的纵横比并不改变。
可参考 OV2740 的 Binning 模式即下图,理解 Binning 的原理:
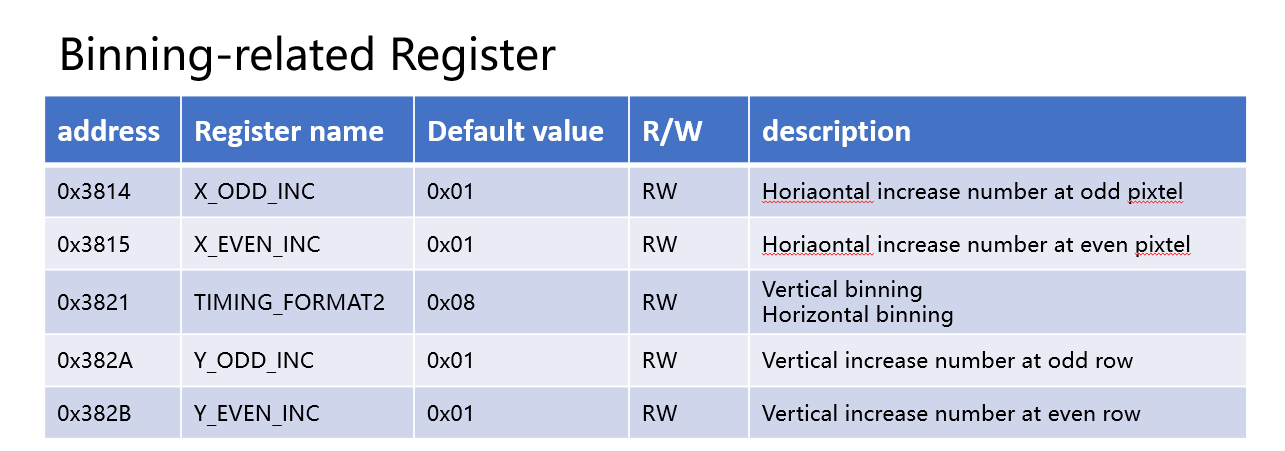
一般来说,OV 的 sensor 均支持 binning 模式。想要使用 binning 模式,需要设置相关寄存器(以 OV2740 为例),如图所示。
本篇文章只是简单介绍了图像传感器的两种缩放模式,
后续我们会继续推出更多关于 Sensor 和 ADAS 相关的技术开发博文,如需更深的技术交流,欢迎关注我给我留言或者在博文下方评论。
【参考文献】:
OV2740-OV2241-Product-Specification-CSP_Version-2-1_WPI-Inernational-Ltd
评论