

1. 方案特色
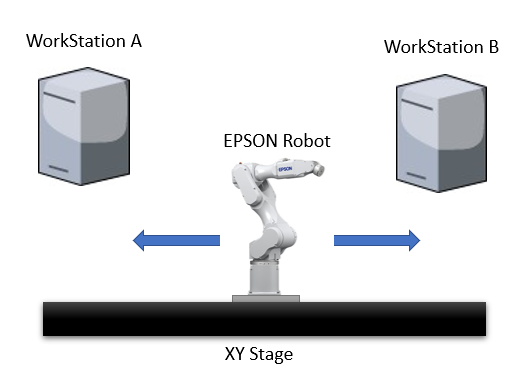
一般常見的機械手臂自動化機台,都是一組手臂對應一個工作站,但有些應用場合下,機械手臂在等待工作站的作業完成之前,都是停止狀態,例如產品電氣測試站,測試過程會有30秒至2分鐘不等的等待時間,此時如果將機械手臂架設於線性馬達之上,則可以兩個電氣測試站之間往返移動並進行產品上下料的動作,有效提升產能與機械手臂的稼動率。
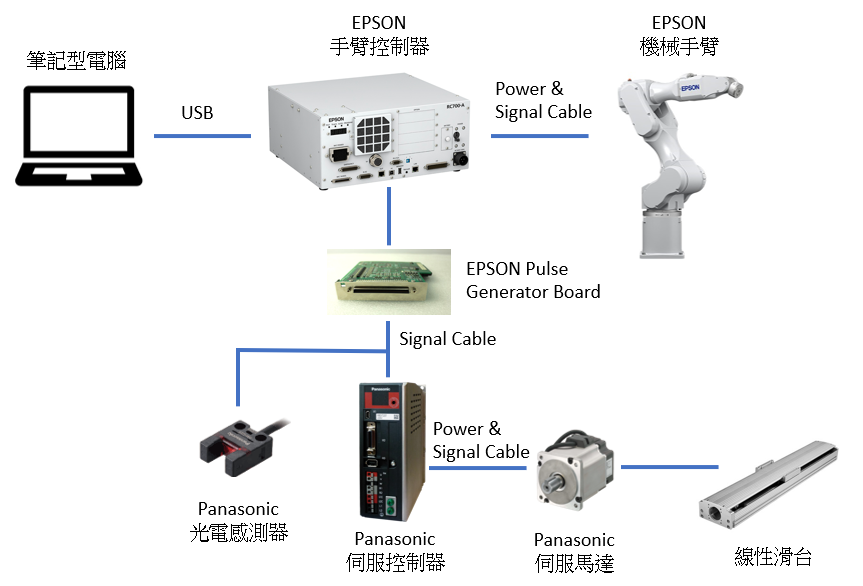
a. 系統整合架構圖:
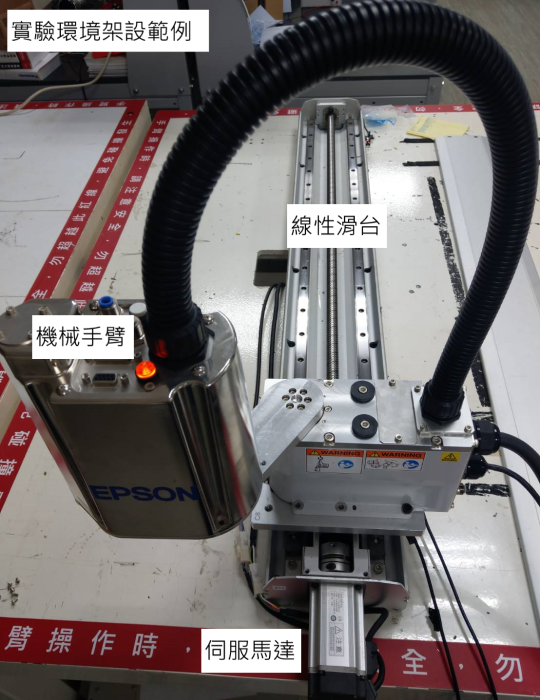
b. 硬體架設環境介紹
下圖為以四軸機械手臂做外部軸控制的測試機台,由下圖可看出,機械手臂選用為短臂型的規格,但透過整合外部軸控制,可以延長工作範圍,進而完成一隻手臂於多個工作站進行作業的方案。
3. 外部軸控制動作範例
一般常見的機械手臂自動化機台,都是一組手臂對應一個工作站,但有些應用場合下,機械手臂在等待工作站的作業完成之前,都是停止狀態,例如產品電氣測試站,測試過程會有30秒至2分鐘不等的等待時間,此時如果將機械手臂架設於線性馬達之上,則可以兩個電氣測試站之間往返移動並進行產品上下料的動作,有效提升產能與機械手臂的稼動率。
2. 外部軸控制自動化介紹
a. 系統整合架構圖:
b. 硬體架設環境介紹
下圖為以四軸機械手臂做外部軸控制的測試機台,由下圖可看出,機械手臂選用為短臂型的規格,但透過整合外部軸控制,可以延長工作範圍,進而完成一隻手臂於多個工作站進行作業的方案。
3. 外部軸控制動作範例
| 動作步驟 | 動作說明 | 實際照片 |
| 1 | 手臂會先在預備點就位。 | 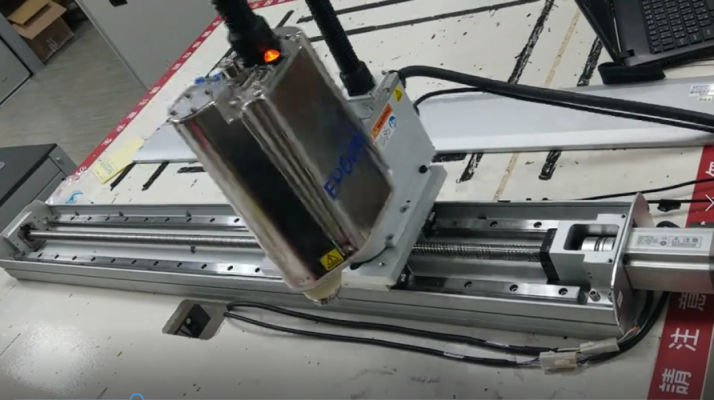 |
| 2 | 移動滑台到工作站A後,手臂進行動作。 | 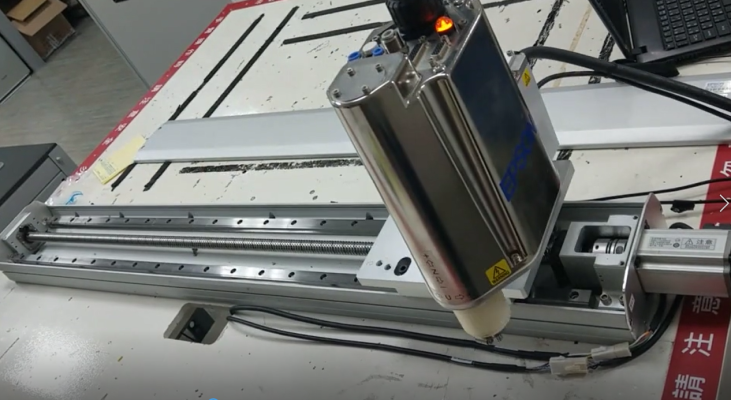 |
| 3 | 移動滑台到工作站B後,手臂進行動作。 |  |
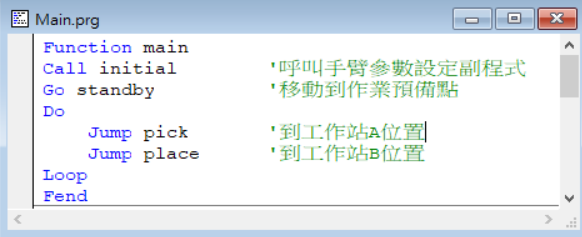
4. 外部軸控制程式範例
透過EPSON的外部軸整合方案,工程師不需再自己額外撰寫馬達軸控程式,只需要操作EPSON的軟體將機械手臂的位置做示教並撰寫運動指令即可做兩點或是多點的往返作業。

參考來源:
國際牌產品照片: https://industry.panasonic.eu/
★博文內容均由個人提供,與平台無關,如有違法或侵權,請與網站管理員聯繫。
評論