

可參考前2篇博文 Qualcomm FastCV 系列(一) 介紹 和 Qualcomm FastCV 系列(二) 開發環境架設 後,本篇接續說明如何在Ubuntu 16.04安裝使用FastCV SDK,並搭配使用Thundercomm的TurboX S626(APQ8053)開發板,展示角點偵測功能。

首先到網址 https://developer.qualcomm.com/software/fast-cv-sdk/tools 下載安裝檔 fastcv-installer-android-1-7-1.bin。
如下圖紅框,點擊FastCV SDK v1.7.1 for Android - Linux Installer進行下載。
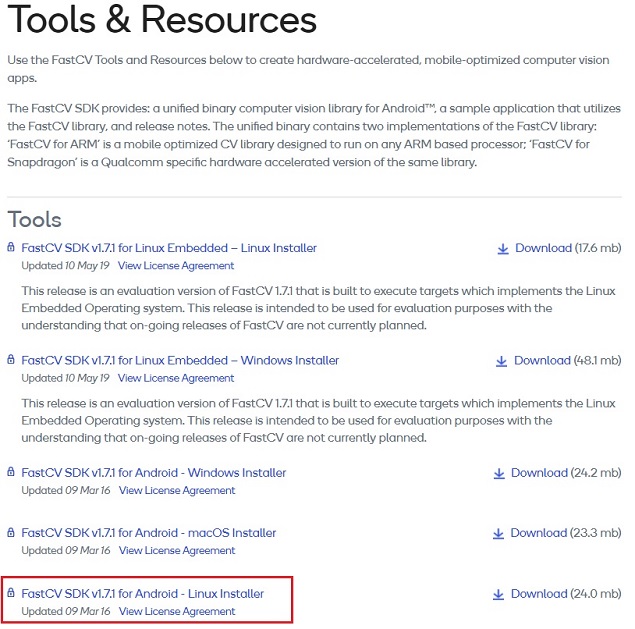
如果頁面出現如下圖,表示已經在下載fastcv-installer-android-1-7-1.bin。

注意安裝後,權限會變成鎖頭,可參考修改權限指令如下述:
sudo chown -R $USER:$USER /home/kyle/WorkSpace/eclipse_Prj/fastcv-android-1-7-1
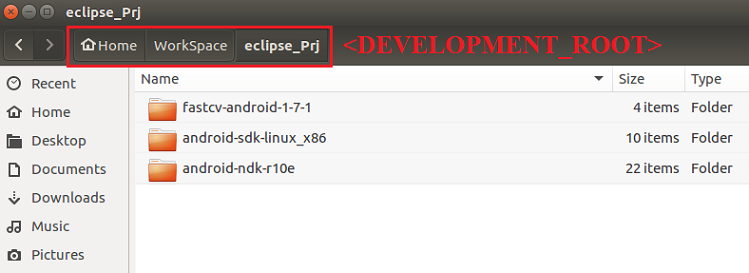
根據上篇博文 Qualcomm FastCV 系列(二) 開發環境架設 的環境變數,架構可參考如下圖建置。
Eclipse將FastCV的samples匯入時,注意事項整理如下:
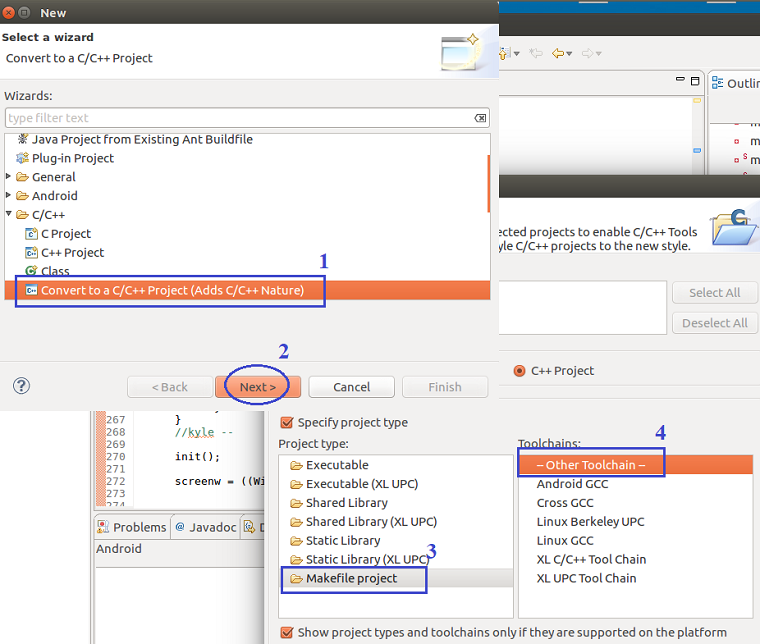
a)設定Convert to a C/C++ project
File > New > Other 開啟視窗後,操作設定依序如下圖:
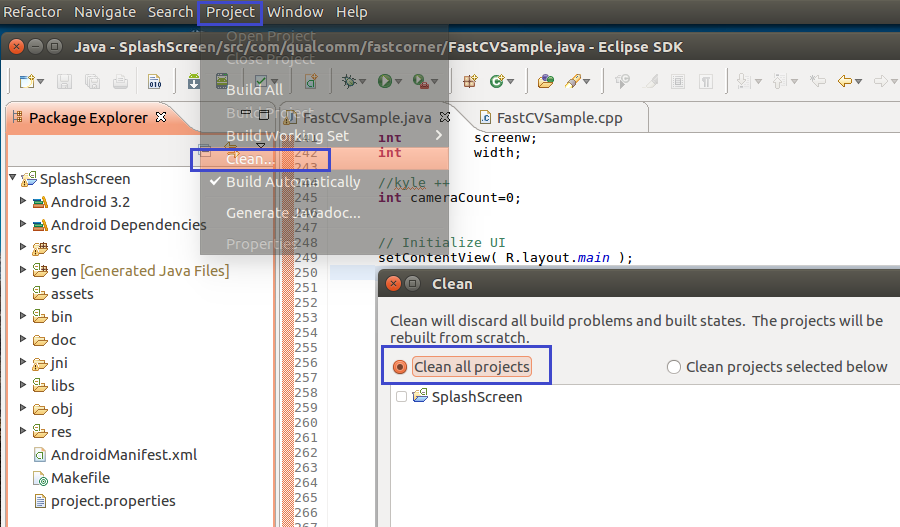
b)如果Eclipse在左方專案欄出現錯誤提示,執行下列操作清除
Project > Clean開啟視窗後,再選擇Clean all projects。
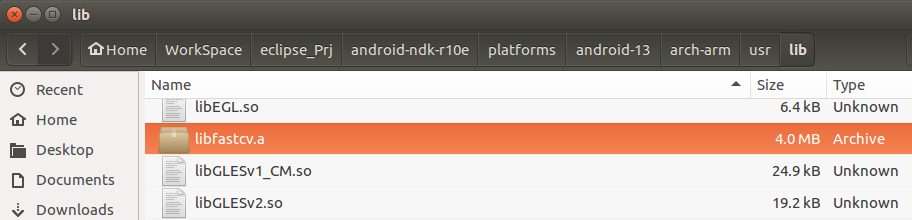
c)拷貝libfastcv.a檔案
把如下路徑的libfastcv.a檔案
/fastcv-android-1-7-1/lib/Android/lib32/libfastcv.a
複製到
/android-ndk-r10e/platforms//arch-arm/usr/lib目錄下。
本文完成後的圖例如下:
d)拷貝fastcv.h檔
手動在如下路徑的include目錄中,建立fastcv資料夾
首先到網址 https://developer.qualcomm.com/software/fast-cv-sdk/tools 下載安裝檔 fastcv-installer-android-1-7-1.bin。
如下圖紅框,點擊FastCV SDK v1.7.1 for Android - Linux Installer進行下載。
如果頁面出現如下圖,表示已經在下載fastcv-installer-android-1-7-1.bin。
注意安裝後,權限會變成鎖頭,可參考修改權限指令如下述:
sudo chown -R $USER:$USER /home/kyle/WorkSpace/eclipse_Prj/fastcv-android-1-7-1
根據上篇博文 Qualcomm FastCV 系列(二) 開發環境架設 的環境變數,架構可參考如下圖建置。
Eclipse將FastCV的samples匯入時,注意事項整理如下:
a)設定Convert to a C/C++ project
File > New > Other 開啟視窗後,操作設定依序如下圖:
b)如果Eclipse在左方專案欄出現錯誤提示,執行下列操作清除
Project > Clean開啟視窗後,再選擇Clean all projects。
c)拷貝libfastcv.a檔案
把如下路徑的libfastcv.a檔案
/fastcv-android-1-7-1/lib/Android/lib32/libfastcv.a
複製到
/android-ndk-r10e/platforms//arch-arm/usr/lib目錄下。
本文完成後的圖例如下:
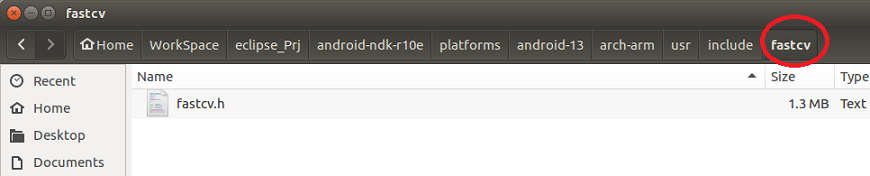
d)拷貝fastcv.h檔
手動在如下路徑的include目錄中,建立fastcv資料夾
/android-ndk-r10e/platforms//arch-arm/usr/include
接著把
/fastcv-android-1-7-1/inc/fastcv.h檔案,複製到剛建立的fastcv資料夾裡。
本文完成後的圖例如下:
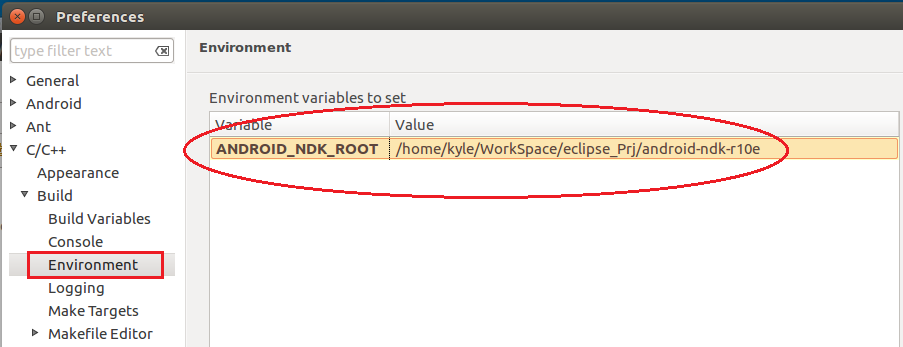
e)修正ndk build錯誤
如果出現ndk-build: Command not found錯誤訊息,設定環境變數如下:
Windows > Preferences 開啟視窗後,本文環境設定如下圖。
接著確認ADB連線是正常後,點擊Run按鈕(如下圖示)。
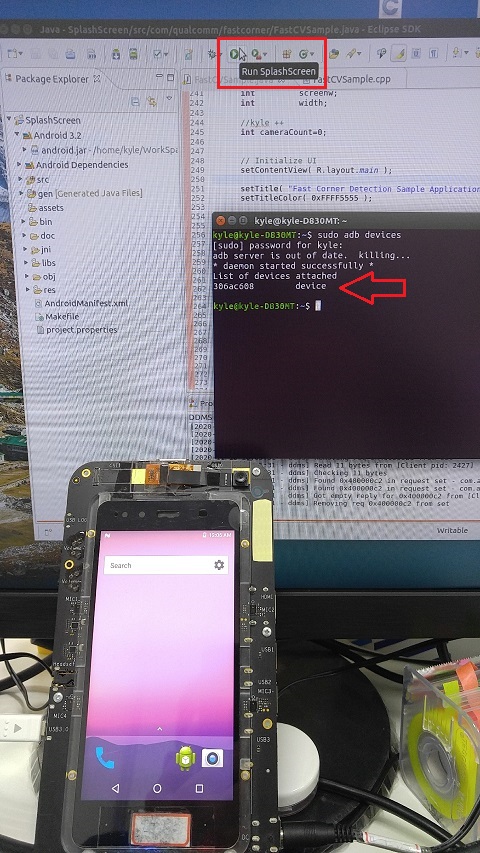
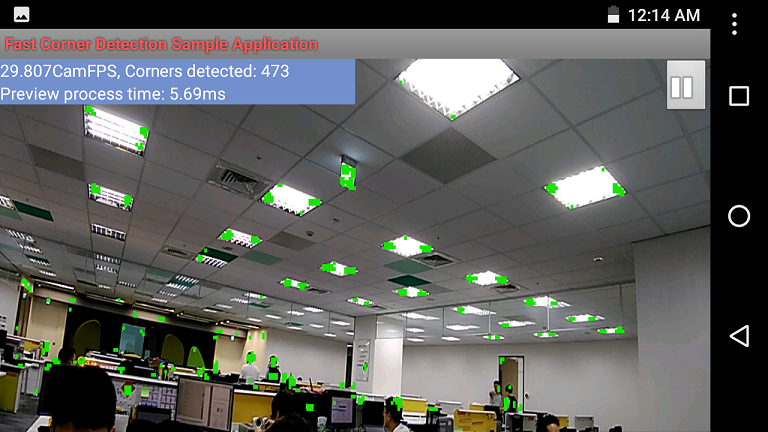
執行成功後,TurboX S626(APQ8053)開發板螢幕會顯示如下圖介面,再點擊Start按鈕。

角點偵測畫面成功如下圖。
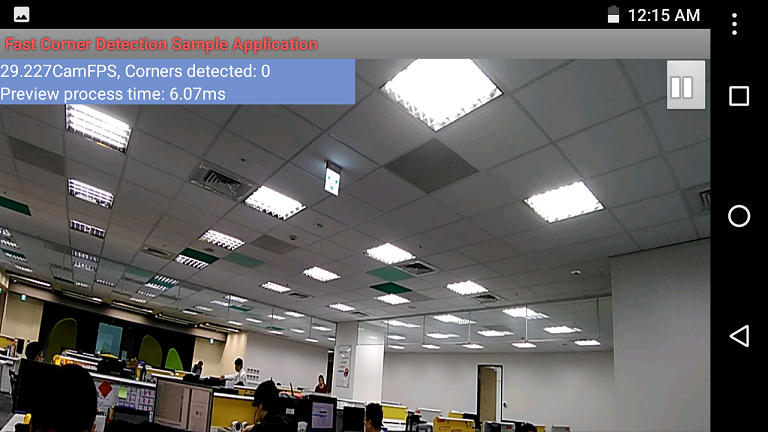
關閉角點偵測功能。
<<延伸閱讀>>
Qualcomm FastCV 系列(一) 介紹
Qualcomm FastCV 系列(二) 開發環境架設
基於 Qualcomm APQ8053 + GPS 之 ADAS 深度學習辨識方案
基於Qualcomm APQ8053實現邊緣運算(Edge Computing)
Thundercomm TurboX D845 Development Kit開箱文
基於Socionext Miranda之影像識別追蹤行人(Object Tracking) ADAS方案

聯絡 詮鼎集團 台灣 Thundercomm 產品線人員: thundercomm.tw@aitgroup.com.tw
聯絡 詮鼎集團 中國 Thundercomm 產品線人員: thundercomm.cn@aitgroup.com.tw

聯絡 詮鼎集團 台灣 Qualcomm 產品線人員: qualcomm.tw@aitgroup.com.tw
聯絡 詮鼎集團 中國 Qualcomm 產品線人員: qualcomm.cn@aitgroup.com.tw