感測器中的機器學習核心可編程性是通過專用工具實現的,該工具可作為Unico GUI的擴展。
Unico GUI
Unico還可以離線運行,而無需將主板連接到PC。Unico GUI提供了用於所支持的三個操作系統的三個軟體。
大大购相关商品 STEVAL-MKI197V1 >> 查询存货及售价
• Windows
– STSW-MKI109W • Linux
– STSW-MKI109L • Mac OS X
– STSW-MKI109M
Unico GUI允許以圖形和數字格式可視化傳感器輸出,並允許用戶保存或管理來自感測器的數據。
Unico允許訪問MEMS傳感器寄存器,從而實現寄存器設置的快速原型製作以及直接在設備上輕鬆測試配置。可以將當前寄存器配置保存於文件中(擴展名為.ucf)並從現有文件加載配置。這樣傳感器可以在幾秒鐘內重新編程。
Unico GUI中提供的機器學習核心工具通過自動生成設備的配置文件來抽象寄存器配置的過程。用戶只需要在GUI中設置一些參數,然後單擊幾個按鈕,配置文件就已經可用。用戶可以從這些配置文件創建自己的設備配置庫。
由於機器學習方法需要收集數據日誌,因此可以通過Unico的load / save來獲取數據。對於加速度計,選框“加速度”允許將數據保存為[mg]。對於陀螺儀,選框“ Angular rate”允許將數據保存在[dps]中。
注意:記錄數據時,必須正確使用“開始”和“停止”按鈕(在Unico的“加載/保存”選項中),以避免在採集開始或結束時記錄錯誤的數據。
例如,當記錄“行走”類的數據模式時,用戶應在按下按鈕“開始”之前開始行走,並在按下按鈕“停止”之後停止行走。
如果離線使用Unico GUI(無需將主板連接到PC),並可獲取數據日誌可以直接上傳它們並生成Machine Learning Core配置。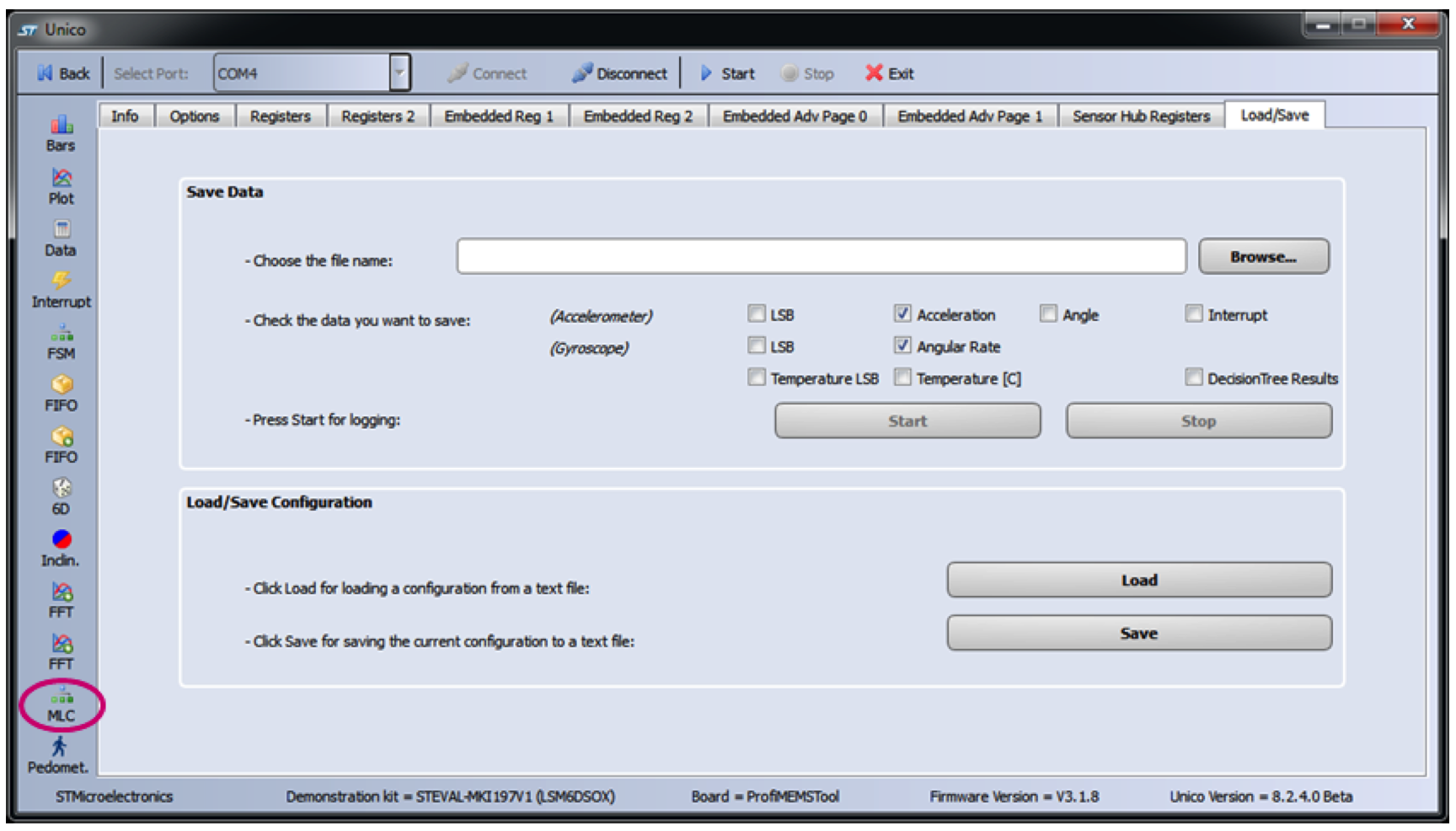
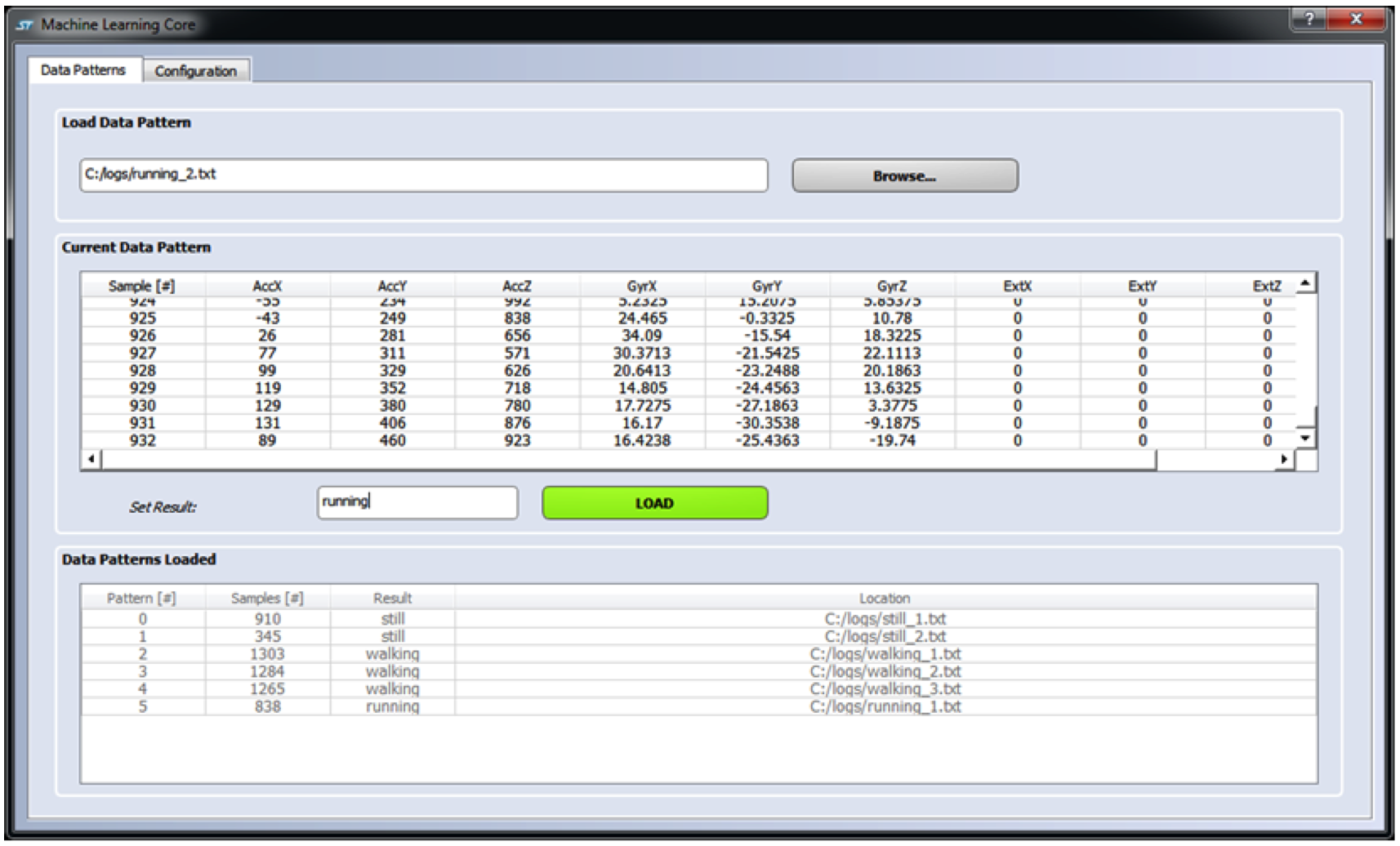
機器學習核心工具的數據模式選項中預期數據的度量單位為:
•[mg]用於加速度計
•[dps]用於陀螺儀
機器學習核心工具會在內部自動管理加速度計從[mg]到[g]的轉換,以及陀螺儀從[dps]到[rad / s]的轉換,以使Machine Learning Core邏輯可與正確的數據([g]和[rad / s])。
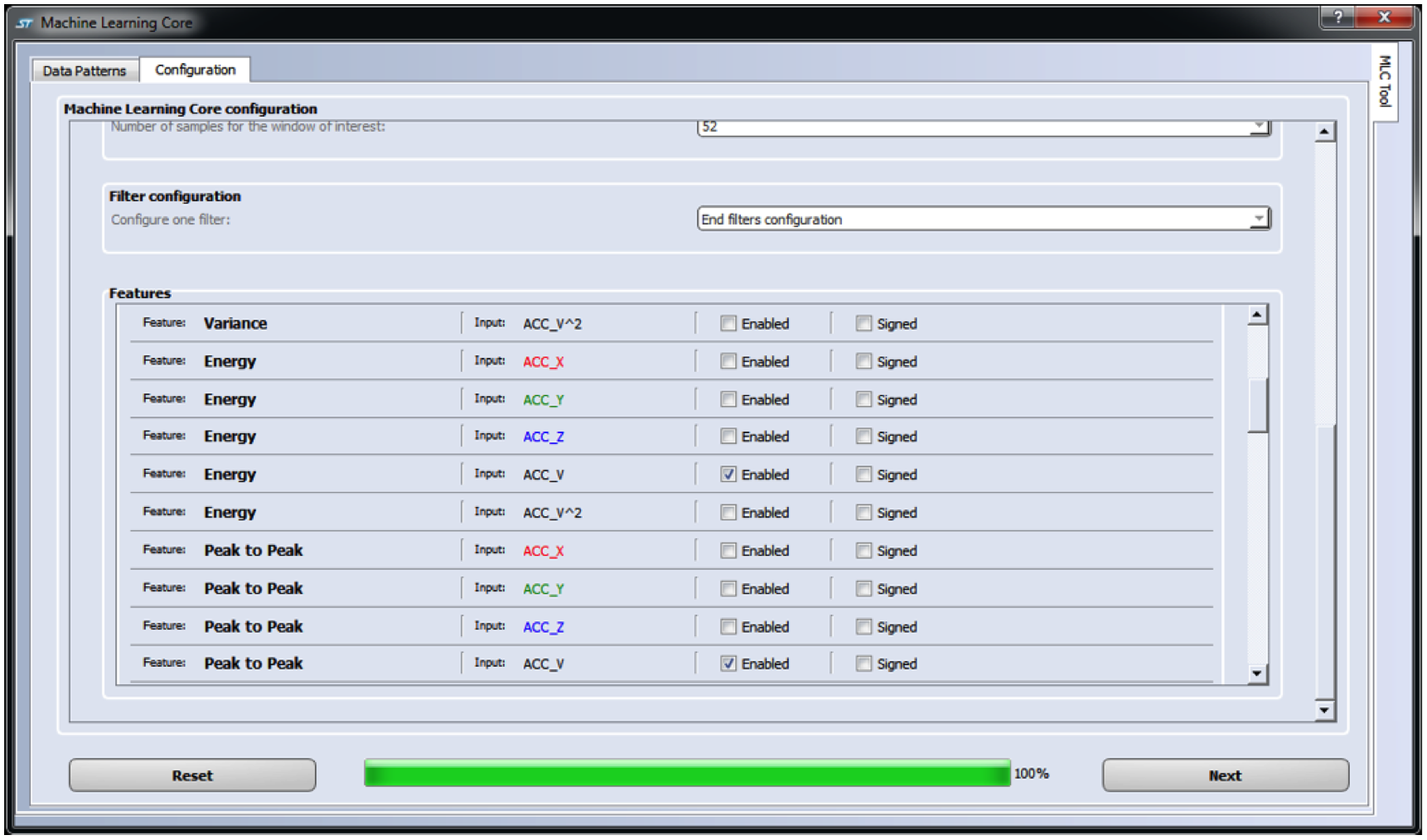
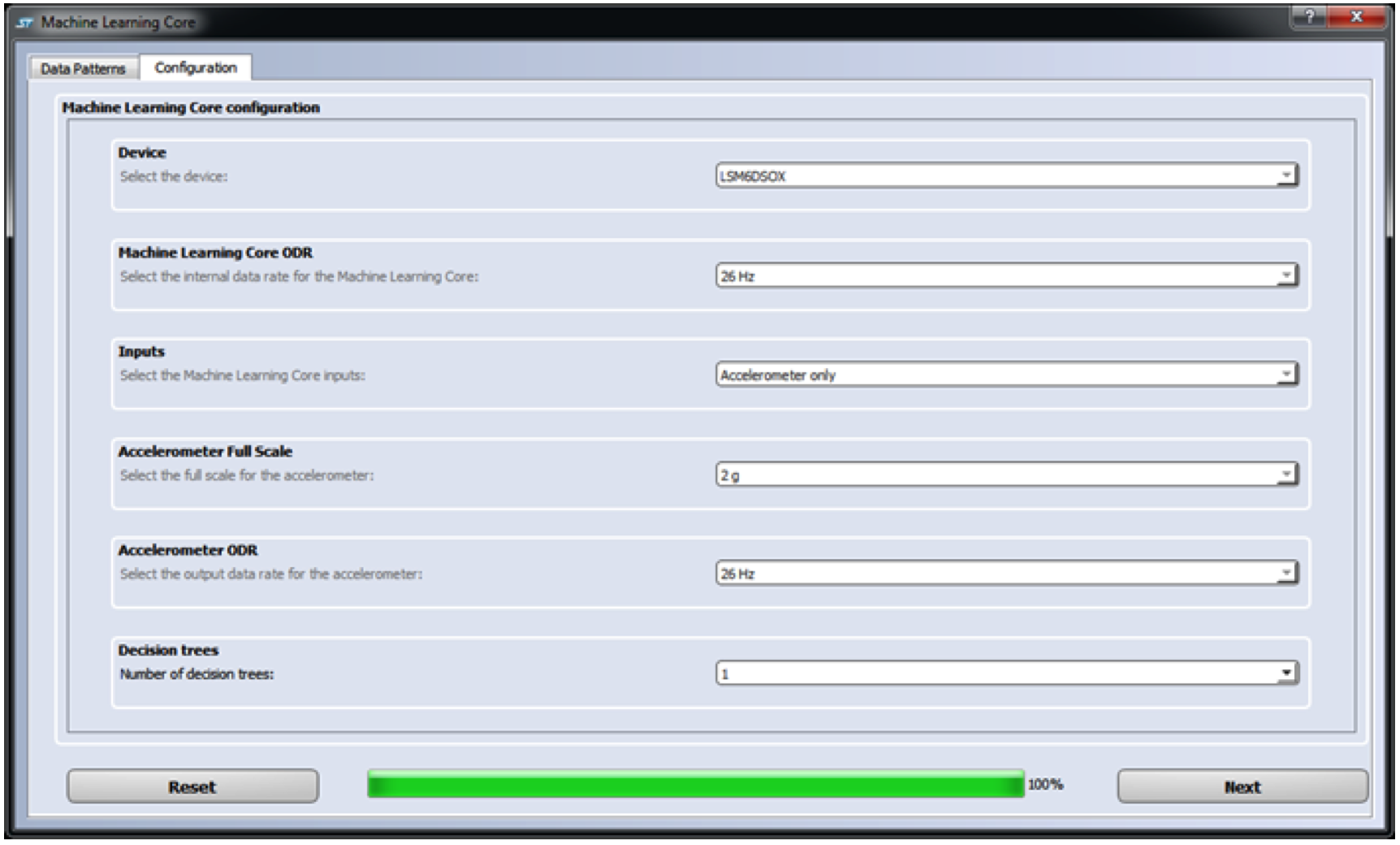
在Machine Learning Core工具的“ Configuration”選項中,可以配置Machine Learning Core的所有參數(例如ODR, full scales, window length, filters, features, meta-classifier)。該工具允許選擇可應用於原始數據的多個過濾器,並根據輸入數據或過濾後的數據計算多個特徵。計算出的特徵將成為決策樹的屬性。
連接電路板並且已配置設備後,該工具會根據當前設備配置自動建議ODR和full scales(對於加速度計和陀螺儀)。
機器學習核心工具的“配置”選項生成屬性關係文件(ARFF),這是決策樹生成過程的起點。 決策樹可以由不同的機器學習工俱生成。
決策樹生成後,可以將其上傳到Unico中的機器學習核心工具,以完成LSM6DSOX寄存器配置的生成。
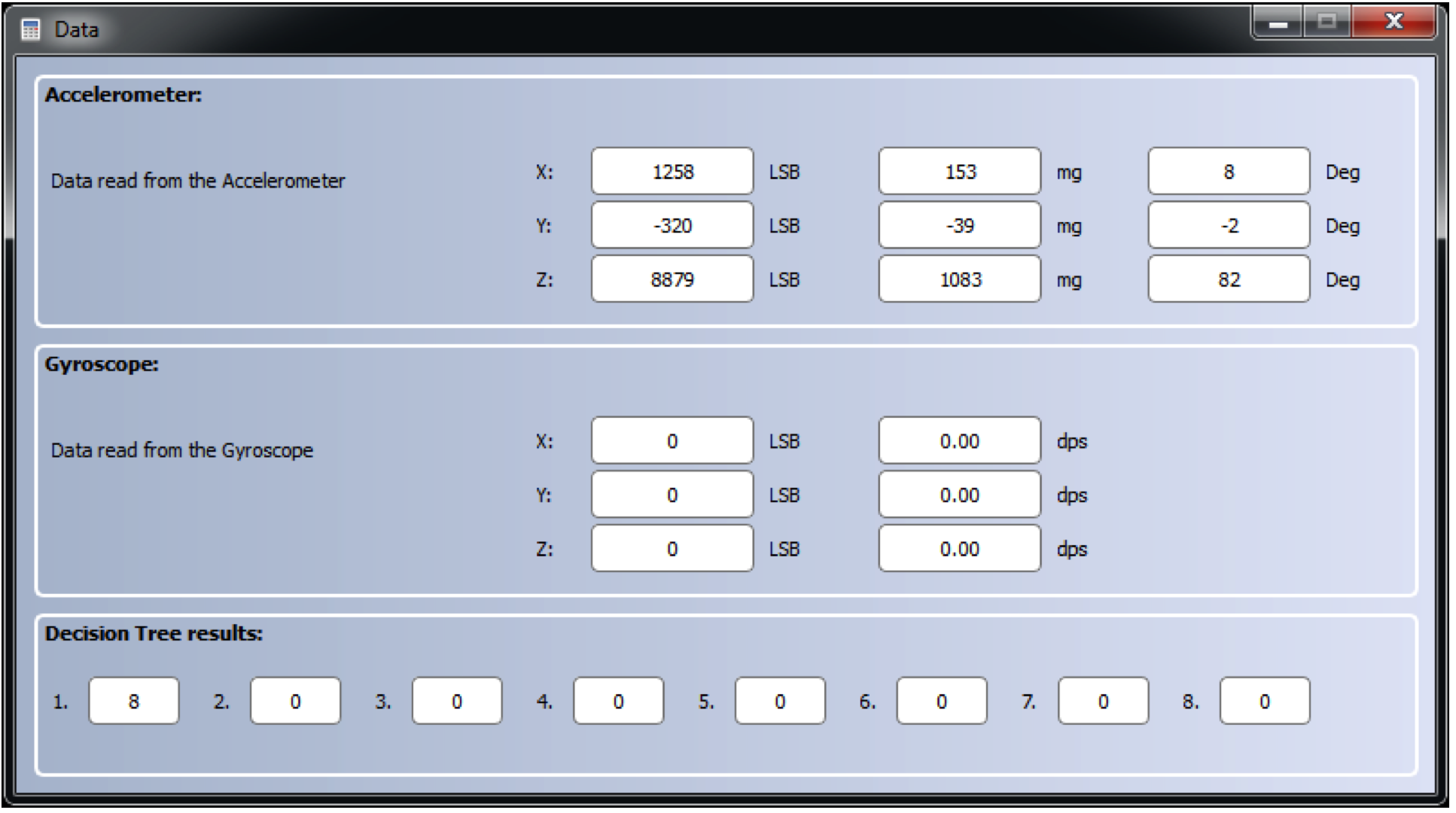
通過訪問傳感器寄存器,Unico GUI可以讀取決策樹輸出的狀態,將其與傳感器數據一起可視化,並可以將所有數據(傳感器輸出和決策樹輸出)一起記錄在同一文本文件中 。
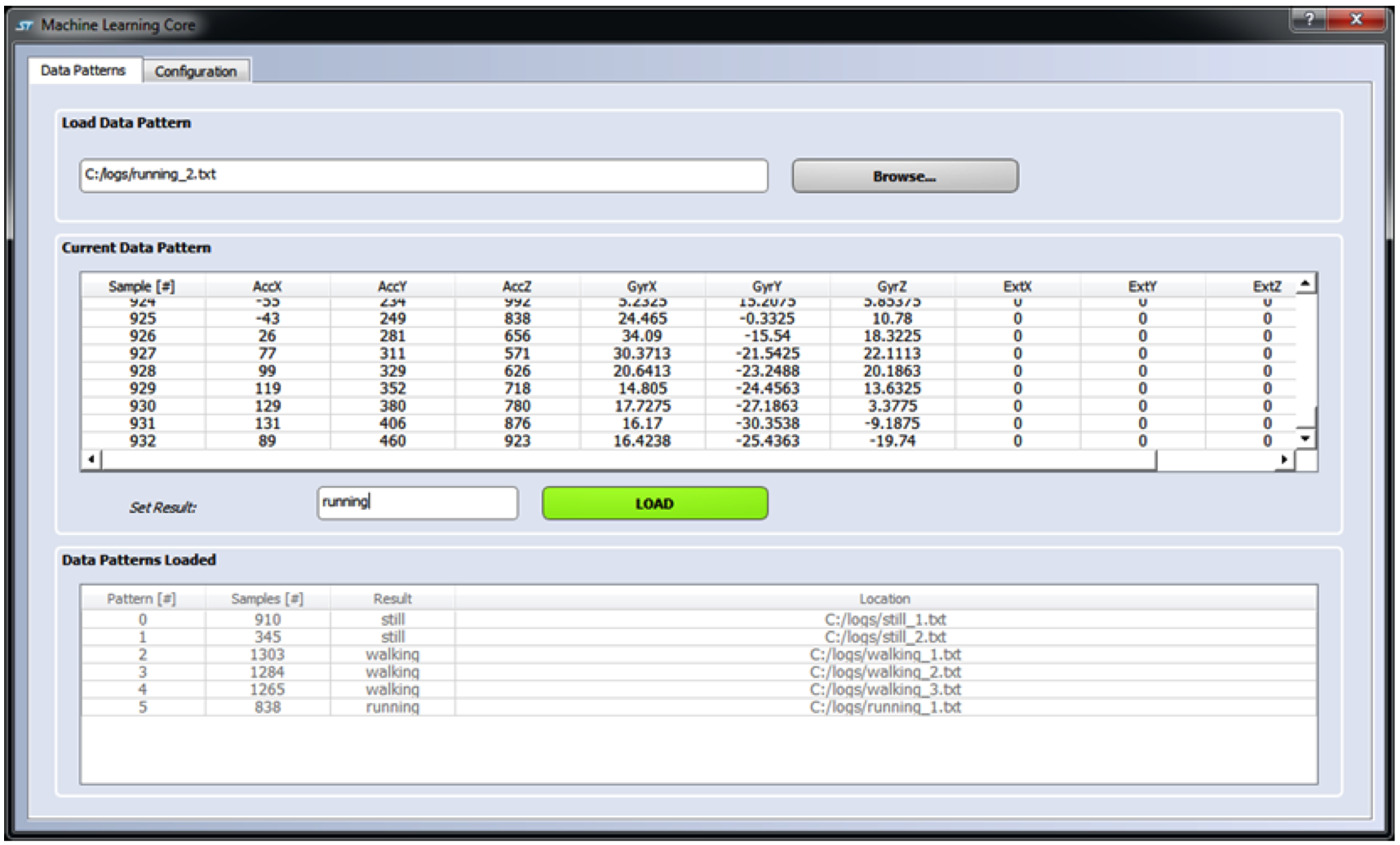
加載完所有數據模式後,可以通過配置選項卡配置機器學習核心參數。 這些參數是ODR, full scales, window length, filters, features, meta-classifier功能等...
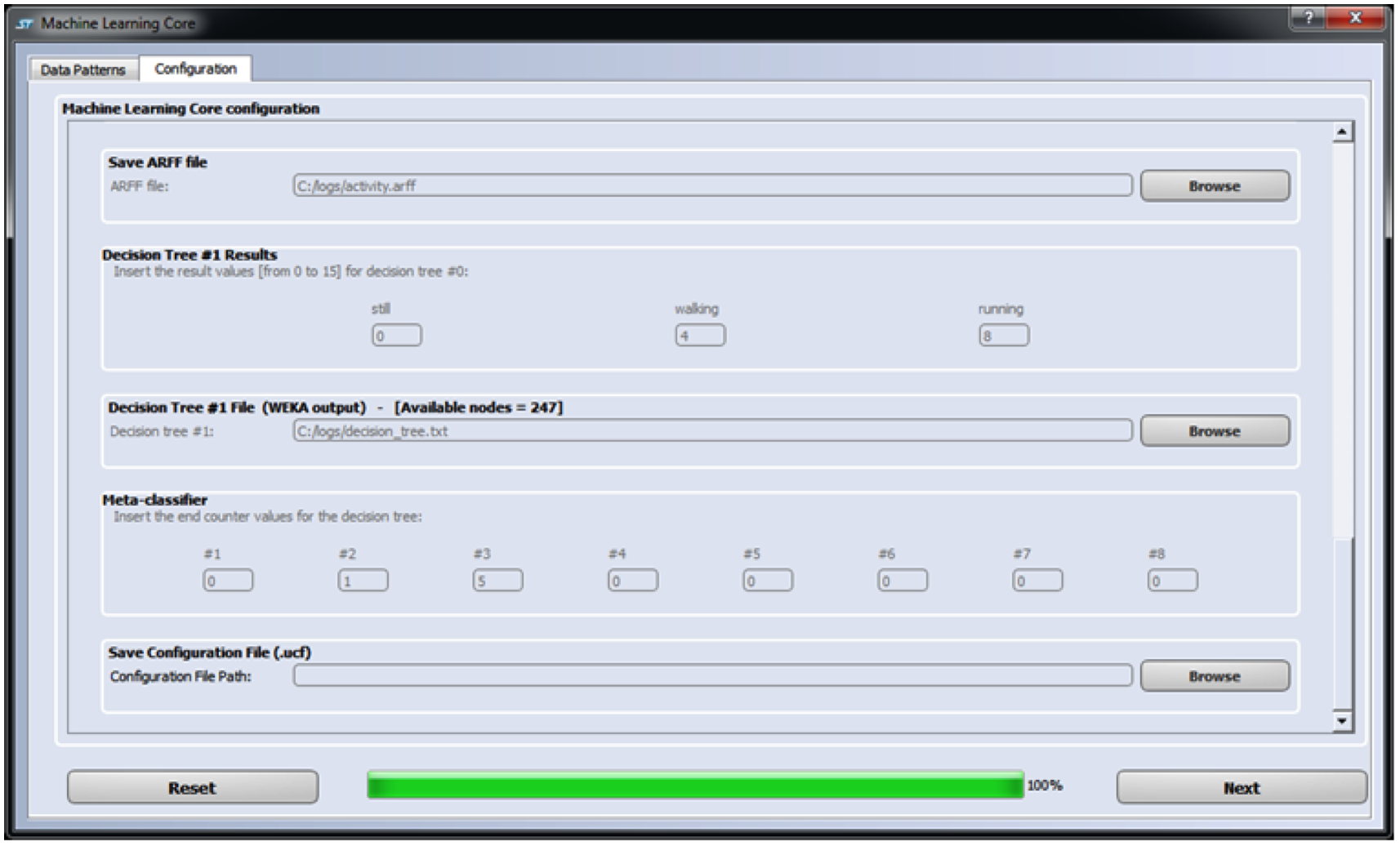
在決策樹配置結果值之後,可以將決策樹(採用Weka J48格式)加載到Unico GUI的機器學習核心工具中,以完成配置並獲取設備的寄存器設置(LSM6DSOX) 。
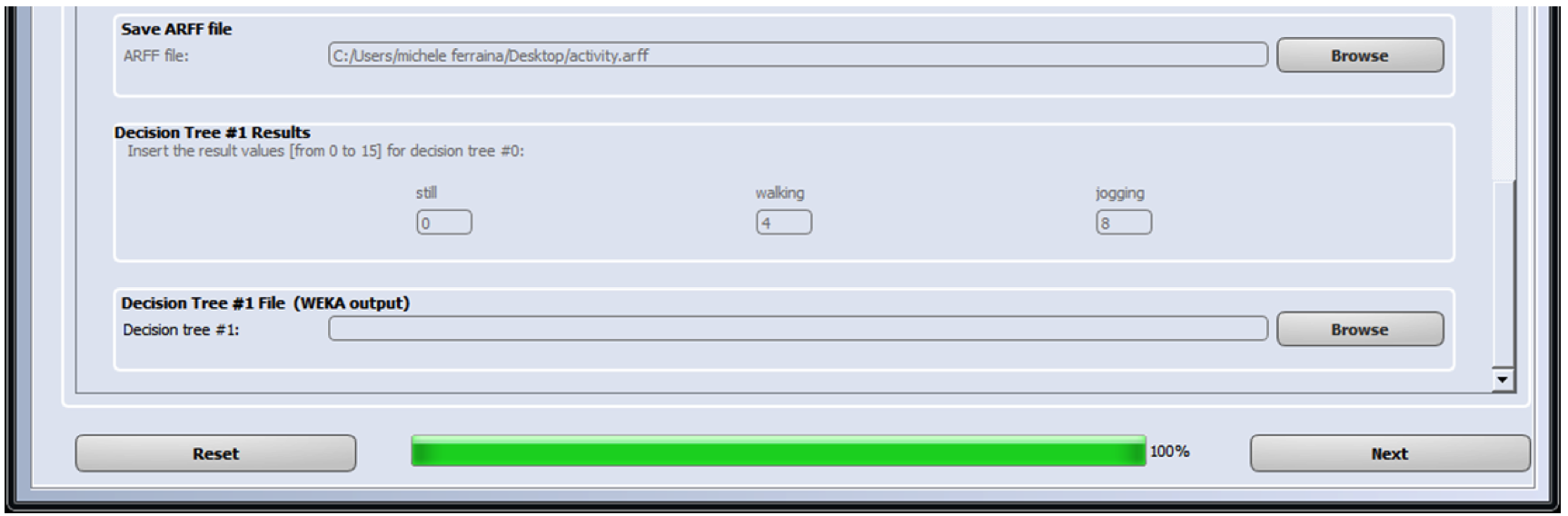
配置過程的最後一步是配置meta classifier,它是用於生成決策樹結果的可選過濾器。 之後,該工具已準備就緒,可以為設備生成配置。
對設備進行編程後,可以在Unico的“數據”窗口或中監視機器學習核心結果。