

低導通電阻和快速開關特性的MOSFET廣泛應用於開關模式電源和電動自行車、電動汽車、電動工具及電動割草機的電動驅動器。在這些高功率應用中,通常需要多個並聯的MOSFET以增加電流能力並提高效率。
有多個因素影響將MOSFET並聯的效果。例如: 實際元件參數的變異、不對稱的閘驅動器以及不良的PCB佈局都可能導致一些問題。首先,並聯MOSFET中的不平衡電流流動可能引發過電流狀況,損壞一個或多個MOSFET。其次,施加在每個MOSFET上的漏極到源極電壓實際上可能不同,可能在某個元件的漏極上達到規格上限而損壞。最後,寄生振盪可能出現在每個MOSFET的閘極,導致超過額定Vgs電壓而損壞一個或多個MOSFET。本應用說明對這些問題進行了詳細研究並提供了建議的解決方案。
並聯 MOSFET應用 - 非平衡電流和電壓
許多設計師在並聯兩個MOSFET時,傾向於將兩個閘極和兩個漏極直接連接在一起。然而,這種做法很容易在閘極上引起振盪。 最糟的情況下,振盪幅度甚至可能超過最大額定閘極電壓,最終損壞MOSFET。
Examples of Oscillation
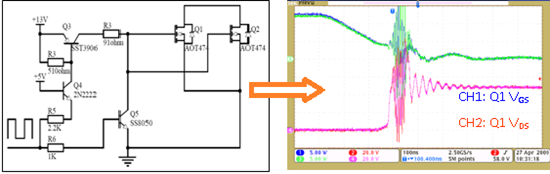
Figure 5. Turn-Off Waveforms of Two MOSFETs Directly Paralleled
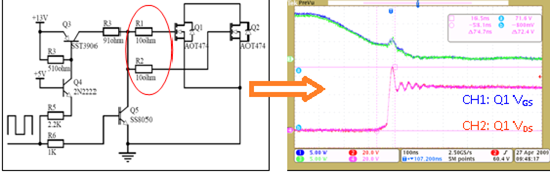
Figure 6. Turn-Off Waveforms of Two MOSFETs Paralleled with Separate Driving Resistors
圖 5 顯示了當兩個閘極直接連接在一起時可能發生的振盪的明確例子。在開啟和關閉過渡期間,約150MHz的高頻振盪會出現。這些振盪通常具有非常高的幅度,並且很容易超過Vgs電壓或Vds電壓的最大額定值,從而損壞器件。
通過使用單獨的閘驅動電阻,振盪可以輕易去除。圖6顯示了在每個MOSFET的閘極上添加一個電阻的結果。兩個MOSFET的閘電壓和漏電壓幾乎相同,這意味著在並聯時,可以假設每個器件的電流是相同的。這大大提高了電路的可靠性。
閘極振盪原因
要了解兩個直接連接在一起的MOSFET閘上高頻振盪的原因,分析等效電路是非常重要的。圖7顯示了兩個並聯的MOSFET,詳細列出了寄生漏電感、閘電容(Cgd)和閘電阻。這些元件形成了一個低阻抗迴路,可以視為一個串聯的RLC等效電路。
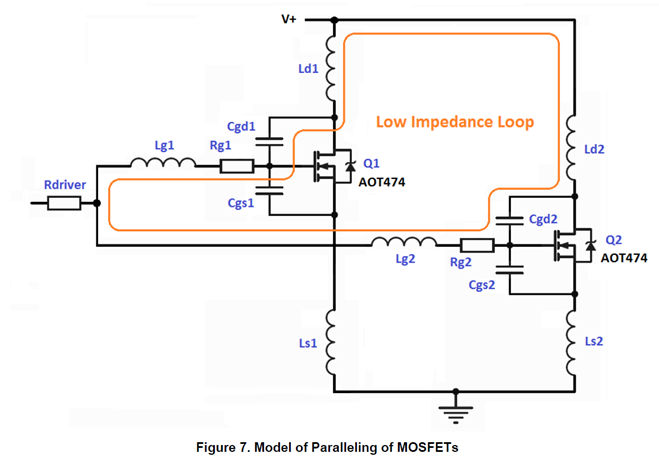
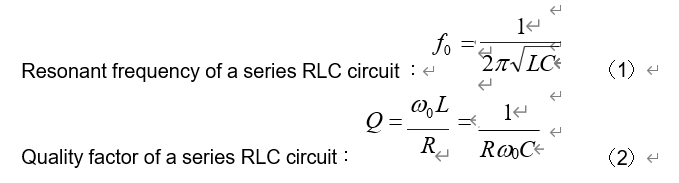
方程式1和2確定了串聯等效電路的共振頻率和在該共振頻率下的品質因數(Q)。電路的阻抗越低,所得到的Q因數就越高。電路對特定頻率信號的響應越具選擇性,所產生的振盪幅度就越高。為了避免這種振盪,建議在每個閘與其串聯相等的閘電阻,這將有助於在迴路阻抗非常低時抑制振盪。
結論
在開關應用中使用並聯MOSFET時,為了實現最佳的電流共享和電壓平衡,設計電路時必須謹慎。為每個MOSFET配置專用的閘電阻將有助於匹配開啟和關閉時間,同時消除高頻振盪的可能性。在PCB佈局中適當處理,以最小化電流迴路,同時保持走線短、寬且匹配,將有助於減少高電流路徑中的寄生電感,從而保持電壓相等並符合設計規範。
Q1: 為什麼需要將MOSFET並聯使用?
Ans: 主要有兩個目的
1. 提升電流處理能力:當單一顆MOSFET的額定電流不足以應付電路需求時,透過並聯可以將總電流分配到多顆MOSFET上,從而承載更大的負載電流。
2. 降低導通電阻:多顆MOSFET並聯時,總的導通電阻約為單顆MOSFET電阻值的。這可以顯著減少導通損耗,進而降低元件溫度並提高整體效率。
Q2: 並聯MOSFET時,為什麼電流無法完全均勻分配?
Ans:
1.Rds(on)的差異:即使是同型號的MOSFET,其導通電阻也存在個體差異。電流會傾向於流向電阻較低的路徑,導致該顆MOSFET承受較大電流。
2.Vgs(th)的差異:閾值電壓的不同會導致每顆MOSFET的開啟和關斷時間不一致,在開關切換的瞬間造成動態電流不均。
3.電路佈局不對稱:PCB走線的寄生電感和電阻不同,會導致每條支路的阻抗不同,進而影響電流的分配,尤其是在高頻開關應用中。
Q3: 如何解決因 差異造成的靜態電流不均問題?
Ans: 主要有兩種方法:
1.批次篩選:盡量選用同一批次,以縮小其Rds(on) 和 Vgs(th)的差異。
2.溫度正相關特性:選擇Rds(on)具有正溫度係數的MOSFET。當某顆MOSFET因電流較大而溫度升高時,其Rds(on)會隨之增大,從而抑制流經自身的電流,將電流轉移至其他較冷的MOSFET。
Q4: 閘極驅動電路在MOSFET並聯應用中需要注意什麼?
Ans: 閘極(Gate)驅動電路的設計至關重要。建議採用獨立閘極電阻Rg的設計,即為每一顆並聯的MOSFET配置一個獨立的閘極電阻,而不是共用一個。
Q5: 為什麼並聯MOSFET時,閘極佈線要盡量對稱?
Ans: 閘極驅動迴路的佈線對稱性直接影響開關同步性。如果從驅動IC到各個MOSFET閘極的走線長度、寬度和路徑不同,會導致驅動信號到達每個閘極的時間不一致。
參考來源