

從餐飲配送到酒店引導,從建築清潔到園區巡檢,商用機器人正逐步融入我們的工作與生活。隨著應用場景日益複雜,傳統方案如LDS(雷射雷達)+避障模組的組合已難以滿足生產需求。
光鑒科技推出的Nebula 400深度相機搭載了英飛凌IRS2975C和IRS9102C,可廣泛應用於配送機器人、物流機器人、清潔機器人、戶外機器人、機器狗、人形機器人等多類智能終端。基於英飛凌先進的REAL3™ ToF以「一台設備解決SLAM建圖、避障、懸崖檢測」的方案,為商用機器人提供了更智能、更高效的感知能力。

英飛凌REAL3™ ToF感測器以毫秒級捕捉速度即時提供深度數據;該感測器為非接觸式,速度快,且不受任何環境光照條件影響。REAL3™ 受益於其背景光抑制 (SBI) 專利技術,支持在所有環境光條件下部署攝影機。REAL3™飛行時間影像感測器支援電子設備構建設備前方場景的三維地圖——無論是房間、移動或靜態物體還是人——並將該地圖即時轉換到數位世界中。

Nebula 400:從功能單一到全場景智慧化的技術躍遷
早期的商用機器人依賴機械式LDS和低精度紅外感測器,不僅體積龐大、噪音明顯,且在黑暗環境或複雜紋理場景中表現不佳。基於英飛凌先進的REAL3™ ToF技術Nebula 400實現了以下突破:
1 超廣視角與精準測距
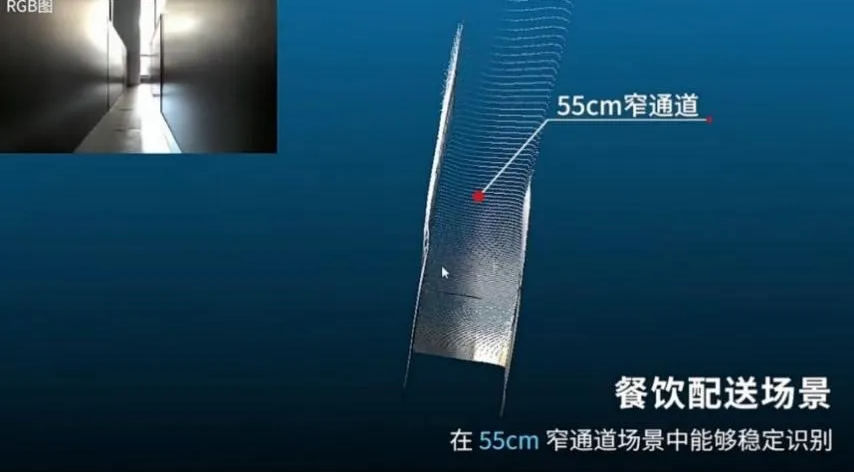
98°(H)×75°(V) 的超寬視場角(FOV),覆蓋 3cm-8m 的量程,輕鬆應對長走廊、窄通道(如 55cm 寬的超窄餐飲配送場景)及低矮空間(如沙發底清潔)等嚴苛場景。
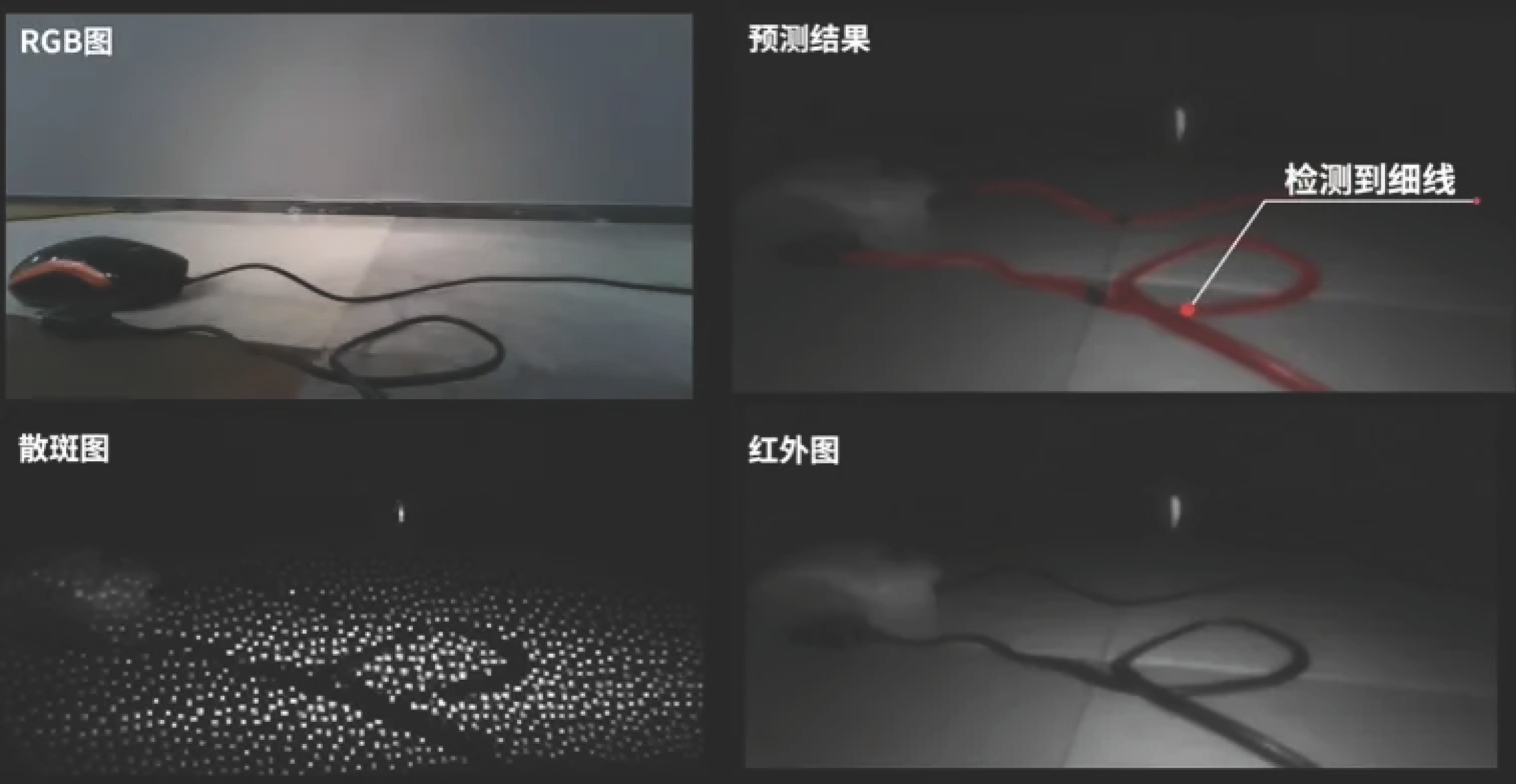
2 多光源融合識別
結合散斑紅外、LED紅外和深度影像技術,精準識別細線、透明物體(如玻璃門)、黑色高反射表面(如瓷磚地面),即使在10萬Lux強光下的戶外場景(如逆光白板識別),也能穩定識別目標。
3 高效計算
內建高效3D SLAM演算法,顯著降低CPU負載,適配嵌入式平台運行。結合AI演算法,進一步提升感知精度,實現液體污漬、短絨地毯等特殊目標的分類避障,清掃覆蓋率提升30%以上。

英飛凌REAL3™ToF技術賦能:從成本降低到體驗升級
Nebula 400的卓越性能背後,源於英飛凌 ToF 技術在硬體整合與演算法優化上的深度賦能。
這個模組將 SLAM 建圖與避障功能結合為一,使用一個小巧且高效的方案,取代了傳統的大型 LDS、紅外攝影機和低精度線性雷射,顯著減少了感測器種類與安裝的複雜度。不僅節省了系統成本與體積,還降低了組裝難度與能源消耗壓力。
在結構設計層面,單一模組實現導航與避障雙重功能,讓機器人的尺寸縮小,使其能進入更狹窄的空間。前置攝像頭的壓縮設計也為更大的馬達騰出了空間。此外,其出色的環境兼容性讓機器人在黑暗環境下依然穩定運行,搭配 3D AI 避障算法,更精準地感知周圍。
在實際體驗上,Nebula 400可實現高解析度避障與精細導航,大幅減少碰撞與維護成本。同時,它不依賴 RGB 圖像輸入,在保護使用者隱私的同時,突破傳統 2D 建圖的侷限,為機器人實現全屋 3D 建模和路徑優化提供了強而有力的支持。

在實際部署中,Nebula 400組合展現出卓越的環境適應性:
- 物流倉儲:在1.8公尺高度斜視向下拍攝時,能穩定識別小體積物體及邊緣輪廓,有效提升分揀效率。
- 醫療、餐飲、飯店配送:精準識別電梯金屬門、地面掉落物、瓷磚等障礙物,為路徑規劃提供穩定的數據來源;
- 戶外清潔:在高強度光照下,仍能穩定建圖,確保導航可靠性。
從模組性能到場景實效,英飛凌將持續與合作夥伴攜手,推動機器人從「功能堆疊」邁向「感知智能」,為新一代商用機器人帶來更強的技術動力。
點擊此處了解更多關於英飛凌REAL3™ ToF的資訊。
掃描 QR Code,關注英飛凌官微尋找更多應用或產品資訊

評論