

介紹安森美Inductive Sensing NCS32100 and NCV77320 之前,先說明什麼是編碼器以及為何要用編碼器。
何謂編碼器 (encoder)?
編碼器主要是測量旋轉速度、位置、角度等機械變化量,再把此變化量轉換成特定電信號給處理系統的轉換器功能元件或模組,是對旋轉角度或位移量進行編碼,之後再以類比、脈衝、數位代碼信號等型式輸出的裝置。
為何要用編碼器?
編碼器所檢測的機械變化量,主要是針對旋轉轉軸的變化量,這轉軸經由馬達、齒輪、叉速器等裝置之後會對應到旋轉速度(或車速)、長度(滾輪產出的距離)、位置(機械手臂的絕對位置)的特定數據,意即經由旋轉軸心所產出的速度、長度、位置若有精密調控的需求,就有必要使用編碼器。
常見的編碼器型式:
常見的旋轉編碼器有光學式和磁性式(包含電生磁)。
光學式編碼器是業界最常採用的高精度編碼器,單價最高精度也是最高的,但不是此次介紹的重點。
磁性(含電生磁感應)式編碼器大致分為三種:
其一是磁性編碼器-主要是透過檢測旋轉軸心尾端永久磁鐵交替的磁化N極和S極的磁極變化,將其轉換為對應的電信號,並以特定形式輸出,單價最低精度也是最低的,也不是此次介紹的重點。
其二是解角器Resolver(電生磁感應式編碼器)-以施加弦波電壓至旋轉的主線圈,經由電生磁場感應到兩個90度相位差的次級線圈以提供正弦和餘弦的輸出信號,此方案特色是堅固耐用不怕油污及高溫,常見於車載轉速相關的檢知。
其三是Industrial Rotary Position Sensor(安森美電生磁感應式編碼器)-NCS32100 電氣規格如下:
- 提供帶有可編程索引的絕對位置輸出
- 提供速度、溫度和備用電池測量
- 支持 RS-485 介面通訊 (2.5 Mbps)
- 全精度下的最大可檢測轉速:6000 rpm(最高可達24位元解析度)
- 精度降低時的最大可檢測轉速:60,000 rpm
- 工作電源電壓範圍:75 V - 5.5 V
- 通訊介面信號準位: 7 V - 5.5 V
- 低功耗電池模式消耗:2 mA(典型值)
- 全工作電流消耗 80 mA(典型值)
- 內部可編程 M0−ARM MCU 提供數據介面, 配置、和校準功能
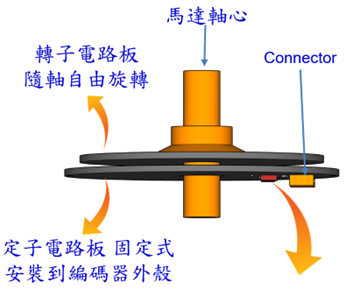
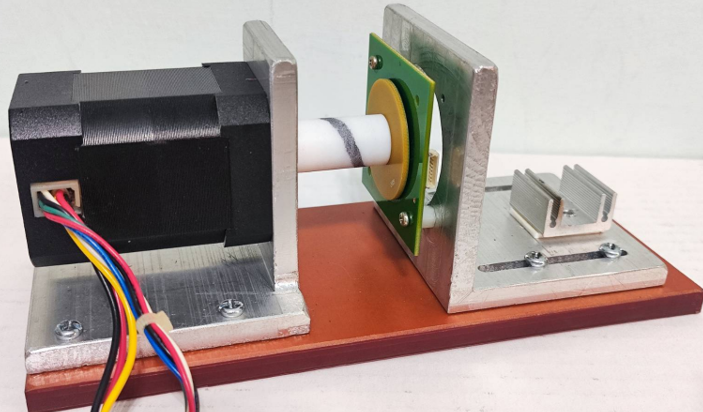
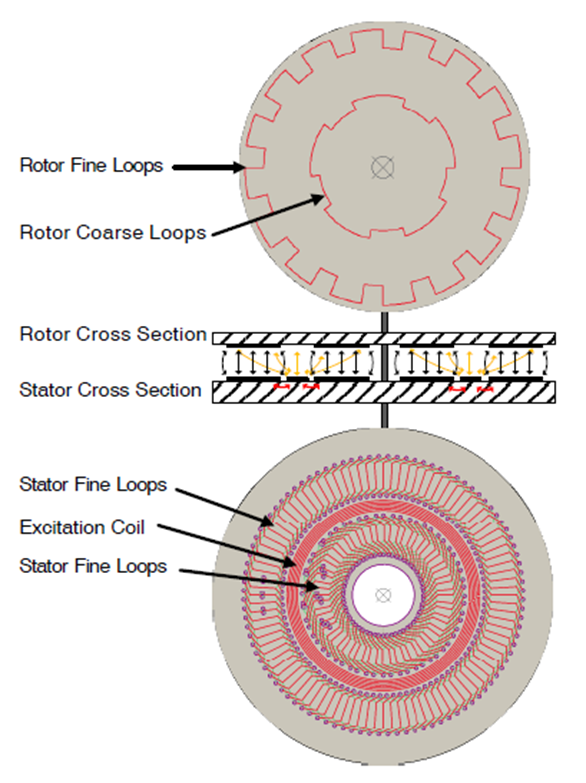
NCS32100 位置檢知傳感器配置結構示意圖及展示板照片:
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100 線路架構示意圖及說明: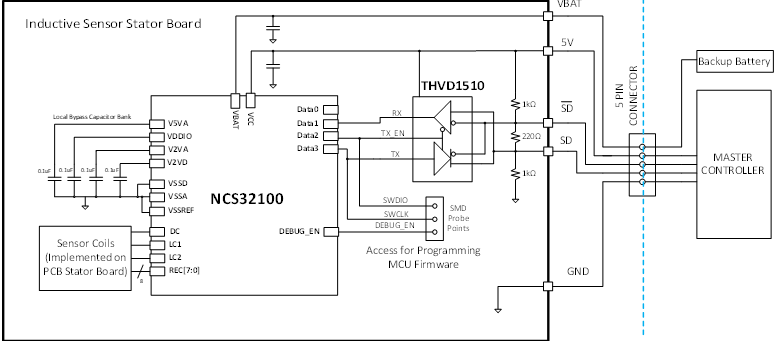
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
- 轉子板上沒有焊接元件,零件都在定子板上。
- 編碼器 (NCS32100) 負責驅動、讀取和編碼來自 PCB 傳感器的信號 。
- 傳感器可以配置為不同的尺寸和精度。
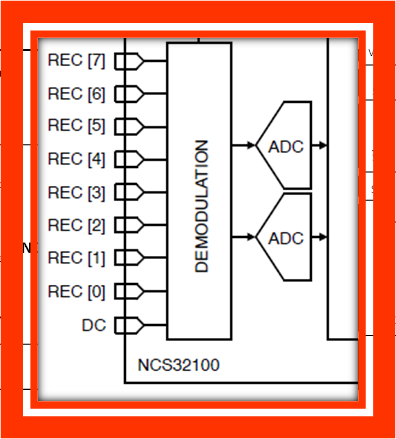
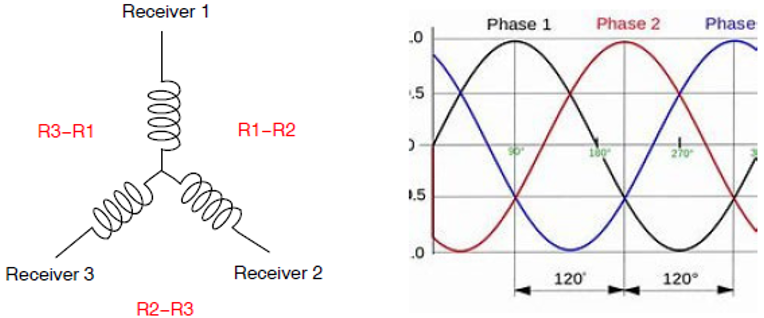
- 由8路ADC中的6路負責兩組三路各相位差120度迴授信號(REC 7:0 示意如下圖)。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100 轉子與定子的組成 :
- 上方為轉子PCB,裡面只有Layout形成的齒輪狀環形走線,主要功能是接收定子環型LC振盪源發射出來的感應磁場進而在閉迴路裡產生感應電流。
- 下方為定子PCB,是4層板,上兩層為環型LC振盪源(中間圓型)及內外各三組相差120度的穿層齒輪狀走線做為感應定子磁場用途,下兩層是NCS32100 及週遭零件或對外通訊的走線。
- 兩PCB中間要求在5mm。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
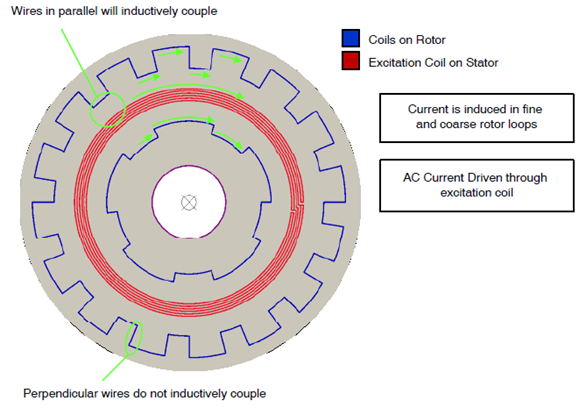
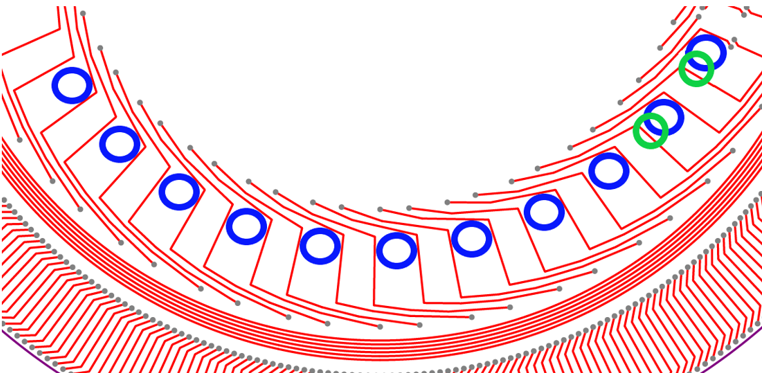
NCS32100 定子LC振盪源感應到轉子說明:
- 紅色代表定子上的LC振盪源線圈且作動時持續產出交流磁場。
- 藍色代表轉子上的感應環路,平行的走線才能感應/接收磁場信號進而產生環形電流。
- 內圈跟外圈有不同的解析度會讓感應信號產生具時間差的準位以利計算絕對座標。
- 綠色代表感應電流方向。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
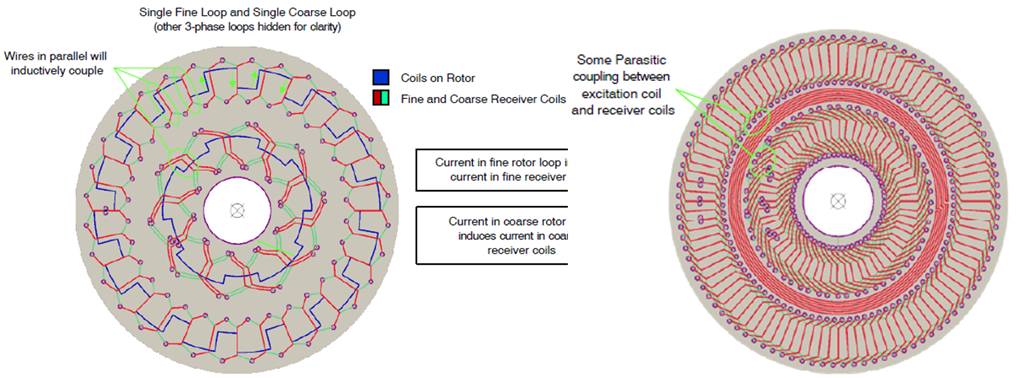
NCS32100 轉子感應磁場再感應到定子線圈說明:
- LC感應源將信號感應到轉子的平行走線,之後轉子的垂直走線再將信號感應回定子的垂直走線接著回到NCS32100 ADC 腳位。
- 定子的感應線圈需配合轉子垂直走線的電流方向,但又必需考慮到三組線圈的走線,所以在轉折時方向改走PCB的第二層,這是搭配間距計算出來的。
- 整體來說就是平行感應出去,垂直感應回來定子PCB上的ADC走線。
- 把6組定子感應線圈同時呈現,就會清楚看到全都符合與轉子回傳走線平行的垂直走線。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
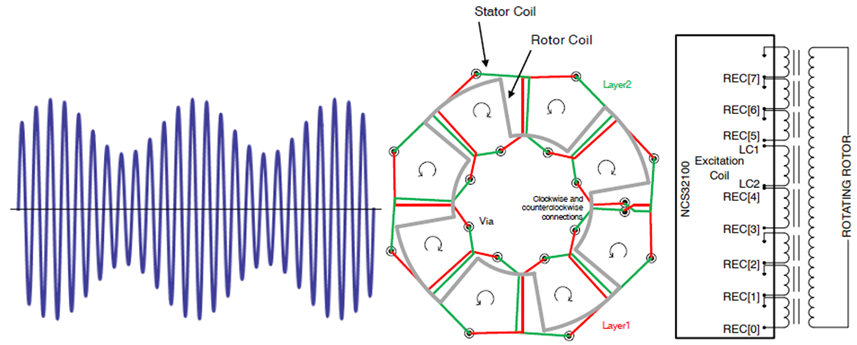
- 轉子所呈現的齒輪狀在不同的缺口位置會有不同方向的電流渦流,但依封閉線圈來說電流方向是一致的。
- 配合齒輪狀線圈的電流方向,定子走線必需有對應近似重疊的形狀以利接收/感應磁場。
- 右圖是單一組感應線圈示意圖,但為了滿足有相位差的信號以利計算絕對座標,所以必需有三組形狀相同的走線,而反方向走另一層則是有效的解決方法。
- 每組定子感應線圈大致會得的像左圖的電壓信號。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100 ADC接收到的信號說明:
- 在8路ADC中,前3路負責高密度的齒輪狀感應電壓信號解碼,後3路負責低密度的電壓信號解碼。
- 高低密度的3路信號採電子週期各120度的相位差方式設計Layout。
- 會在每個不同的馬達位置得到不同的3相高頻信號及3相低頻信號。
- 再將這6個不同時間/準位的信號混合解析後就計算出當下的絕對座標值。
- 另外,IC本身帶信號增益補償及數位濾波功能。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
NCS32100在電子週期裡找到機械週期的絕對位置說明:
- 馬達轉一圈等於一個機械週期,但一個機械週期可能是數個或數十個電子週期所組合而成。
- 電子週期會是在機械週期的那個位置可能得在走線粗環感應線圈上做微小的差異化來辯識。
- 如下圖,以固定的圓形來比對就會發現感應線圈在不同位置有不同的間距,他可能出現在轉子的低密度齒輪狀也可能出現在定子的低密度線圈。
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
車規版 Rotary Position Sensor NCV77320(安森美電生磁感應式編碼器)電氣規格:
- 整合 DSP 位置運算,最高支持16位元轉速解析度
- 可設定類比輸出或 SENT 輸出
- 內建溫度感測器
- SPI 看門狗功能
- 電源電壓 5 V;耐受 −15 V 至 30 V 電壓
- 透過3 V 或 5 V 微控制器實現靈活的 SPI 操作
- 最大檢知轉速為 10800 rpm
- 工作環境溫度 −40 至 150°C 並符合汽車安全標準 ISO26262
NCV77320 線路架構示意圖及說明:
NCV77320 僅配置三組旋轉位置檢知ADC介面,故轉速度解析度相對較低,相較於同為絕對座標編碼器的NCS32100而言,規格上多了具備符合車規要求,更少的ADC介面成就了更小的解決方案材積,便能提供給使用者更多元的方案選擇。
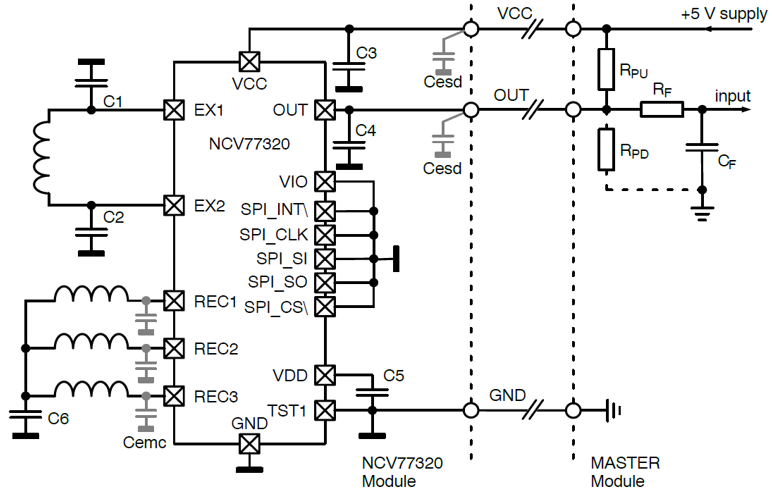
圖片出處:https://salesconnect.onsemi.com/dashboard/?t=Modules
結論:
基於安森美推出的電生磁感應式編碼器NCS32100與NCV77320,同屬於絕對型編碼器,若有低轉速且需絕對座標的條件要求,具備符合車規標準、非接觸方式檢知可不受油污影響、同時允許相較於解角器更小的材體設計在方案成本及材積都有一定優勢的NCV77320必定是最佳的選擇。
評論