

在上一篇的介紹中,我們跟大家一起分析了無刷馬達的四個功能單元,並詳細分析了PWM和逆變器單元的工作情況。那麼本篇(下篇)我們繼續來熟悉無刷馬達工作流程中另外兩個重要的部分:轉子位置檢測和波形驅動。
轉子位置檢測是馬達控制和驅動過程中不可或缺的一環,是實現馬達精確控制和穩定運轉的關鍵,特別是對於需要高精度控制的馬達系統,轉子位置檢測的精度和速度都至關重要。常用的無刷馬達轉子位置檢測有兩種方式,即霍爾感測器檢測和無感測器檢測。
感測器原理
霍爾感測器的原理是檢測磁場並輸出與其大小成比例的類比信號。霍爾感測器的輸出通過比較器轉換為開關數位信號,然後作為無刷馬達的轉子位置信號。採用高精度、昂貴的編碼器和解析器來檢測伺服馬達的位置,以實現精確的位置控制。對於2極馬達,通過在定子面對轉子磁極的位置上,以120度的間隔佈置三個霍爾感測器,從而達到每60度檢測一次轉子位置的目的。如圖1所示,霍爾感測器不需要接觸就能檢測位置,所以具有很高的耐用性,但它對高溫敏感,所以並不適用於所有環境。
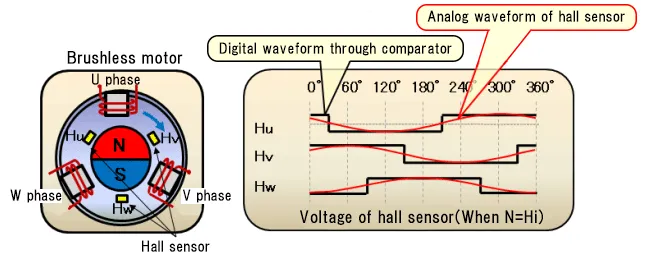
圖1 霍爾感測器轉子位置檢測示意 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/Kog5FGQiWpYGG7pd7wP79A
由於超小型馬達沒有空間用於安裝感測器,或者對於追求性價比的馬達來說,感測器價格過於昂貴,因此轉子位置可以通過感應電壓來檢測。此種情況採集通過轉子旋轉產生的電動勢(感應電壓)波形來確定位置。目前只有方波驅動可以通過感應電壓檢測轉子位置。U相、V相、W相中的一組線圈始終處於關閉狀態。通過檢測無激勵相線的馬達驅動波形的幅度在變為1/2的點,轉子位置可以每60度指定一次,具體參考圖2所示的流程。值得注意的是,在停止狀態下,這種方法存在弊端。由於沒有產生電動勢,所以無法檢測到位置。
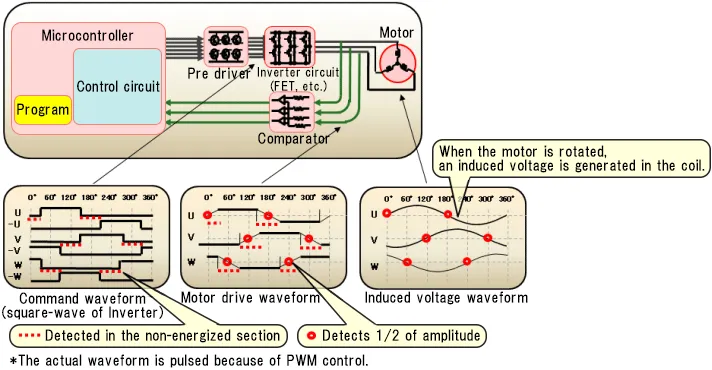
圖2 通過感應電壓進行轉子位置檢測的詳細示意 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/Kog5FGQiWpYGG7pd7wP79A
感應電壓只適合方波驅動情況,方波驅動作為最簡單的驅動方法,根據轉子的旋轉角度,切換功率元件的開關狀態,然後改變定子線圈的電流方向,使轉子旋轉。轉子轉動一次,電流方向就會切換6次。馬達驅動採用逆變電路,通過PWM控制電壓,如圖3所示。該方法與直流有刷馬達的驅動原理相同,它是無感測器馬達使用最廣泛的驅動方法。
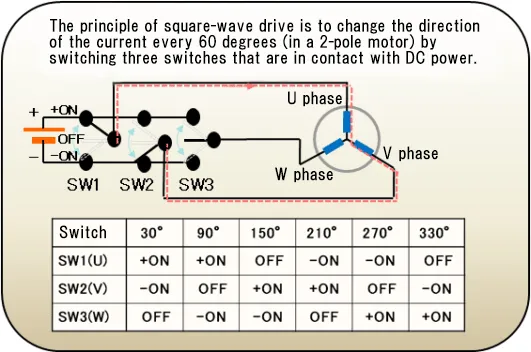
圖3 方波驅動的位置資訊與工作狀態示意 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/Kog5FGQiWpYGG7pd7wP79A
與之對應的就是正弦波驅動,根據轉子的旋轉角度,以正弦的形式連續改變定子線圈的電壓,從而使轉子旋轉。根據頻率的不同,馬達的3相會有一定的“延遲”。控制時,需要檢測轉子位置。通常,使用三個位置感測器每隔60度檢測一次位置,即時估算轉子位置,並輸出與轉子位置相符的正弦波電壓。採用逆變電路驅動馬達,通過PWM控制實現電壓的連續變化。與方波驅動相比,它的效率更高,產生的振動和噪音更小。
我們通過圖4來舉例展示方波驅動的過程,如果正弦波為1 Hz,那麼“播放”這個正弦波需要一秒鐘。如果第二波偏移120度,那麼該第二波將在第一波之後0.33秒正好開始,也就是完整時間的三分之一。第三波將再次開始偏移120度,即第一波開始後0.66秒。這是為了適時控制直流無刷馬達的U、V、W相。根據3相的時間順序,馬達將順時針或逆時針旋轉。
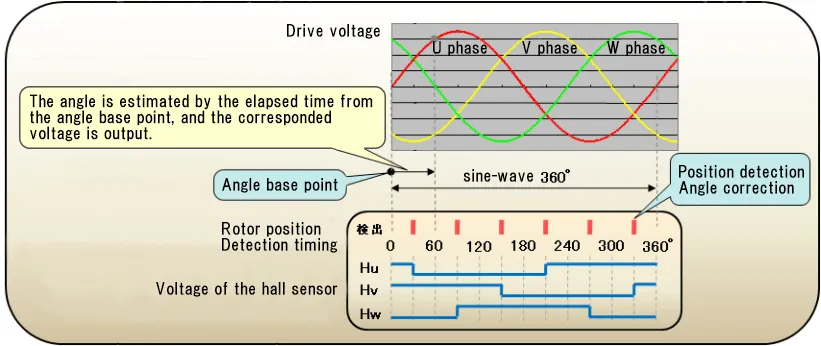
圖4 正弦波驅動狀態示意 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/Kog5FGQiWpYGG7pd7wP79A
經過這三篇的直流無刷馬達的介紹,我們一起熟悉了整個無刷馬達系統的工作狀況和驅動細節,操控馬達系統的知識已準備就緒,讀萬卷書不如行萬里路,大家可以實際動動手嘗試讓馬達真正的轉起來囉~
感謝您的觀看,還請不望多多支持東芝半導體 – 馬達驅動方案;有任何需要的部分還請不用客氣的連結東芝正式代理商 – 世平興業股份有限公司。甘蝦~
參考來源