

在無感測器方波驅動的情況下,需要用於驅動微控制器和電動機的逆變電路、驅動逆變電路的預驅電路和比較輸出電壓的比較器。
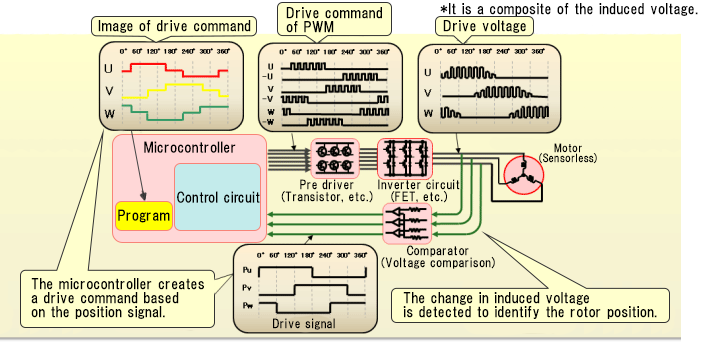
圖1 作者:東芝半導體 / 出處https://toshiba-semicon-storage.com/cn/semiconductor/knowledge/e-learning/brushless-motor/chapter4/turn-square-wave-drive.html
在無感測器方波驅動的情況下,啟動時不會產生感應電動勢,無法識別轉子位置。
因此,需要執行以下操作。
- (1)首先,強行使電流流向指定線圈,使轉子移動到指定位置。
- (2)使電流在低電壓和恒定週期的線圈中流動。
- (3)在逐漸增加電壓的同時旋轉轉子。
- (4)增加轉數,轉子位置可以通過感應電壓檢測。
- (5)使電流流向檢測到的轉子位置所對應的線圈。
- (6)如果能檢測到穩定的位置,則開始穩定運行以達到目標速度。
在穩定運行狀態,通過回饋目標速度偏差,可以保持速度不受負載波動的影響。
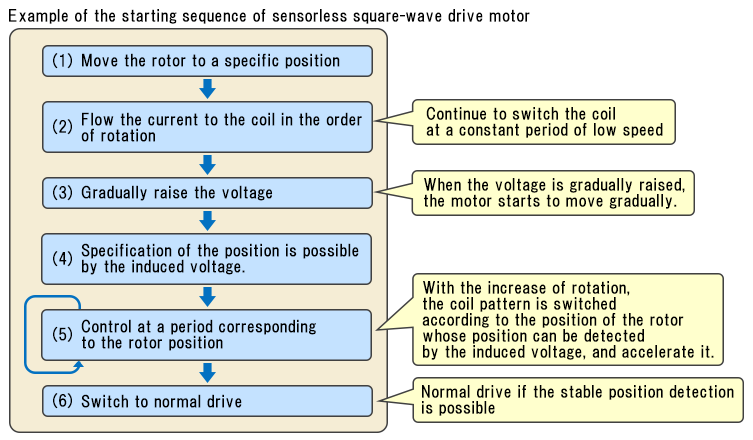
圖2 作者:東芝半導體 / 出處https://toshiba-semicon-storage.com/cn/semiconductor/knowledge/e-learning/brushless-motor/chapter4/turn-square-wave-drive.html
(* 當強行移動到指定位置時,可能會因停止位置而瞬間反轉)
通過與旋轉同步地改變流過線圈的電流方向,可以使轉子連續旋轉。
電流流動有6種模式:U相->V相,U相->W相,V相->W相,V相->U相,W相->U相,W相->V相。
(每60度切換一次電流方向)
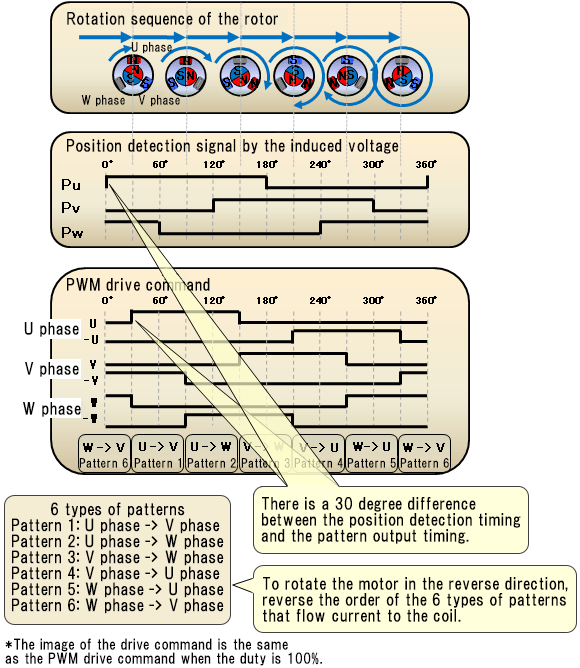
圖3 作者:東芝半導體 / 出處https://toshiba-semicon-storage.com/cn/semiconductor/knowledge/e-learning/brushless-motor/chapter4/turn-square-wave-drive.html
以上為簡述直流無刷馬達的方波驅動,下篇介紹正弦波驅動。
參考來源