

簡介
大聯大世平集團針對於車用 77Ghz 毫米波雷達,推出了基於加特蘭 CAL77S244-AB 的短距雷達方案。本方案應用在車身短距雷達系統,最大探測距離可達 80 米。開發板搭載的主要器件有 CALTERAH 的SOC CAL77S244-AB,傑華特的車規級 BUCK、LDO 電源晶片,NXP 的 CAN 晶片,華邦的車規級 NOR Flash 等。可以應用於前碰撞預警(FCW)、後向盲點監測(BSD)、開門預警(DOW)、艙內監測等功能,符合 ASIL B 功能安全等級。
本文主要對加特蘭 CAL77S244-AB 這顆 SOC 的 SDK 文件做一些簡單介紹。
1 世平 BSD 方案硬體平台
1.1 硬體框圖
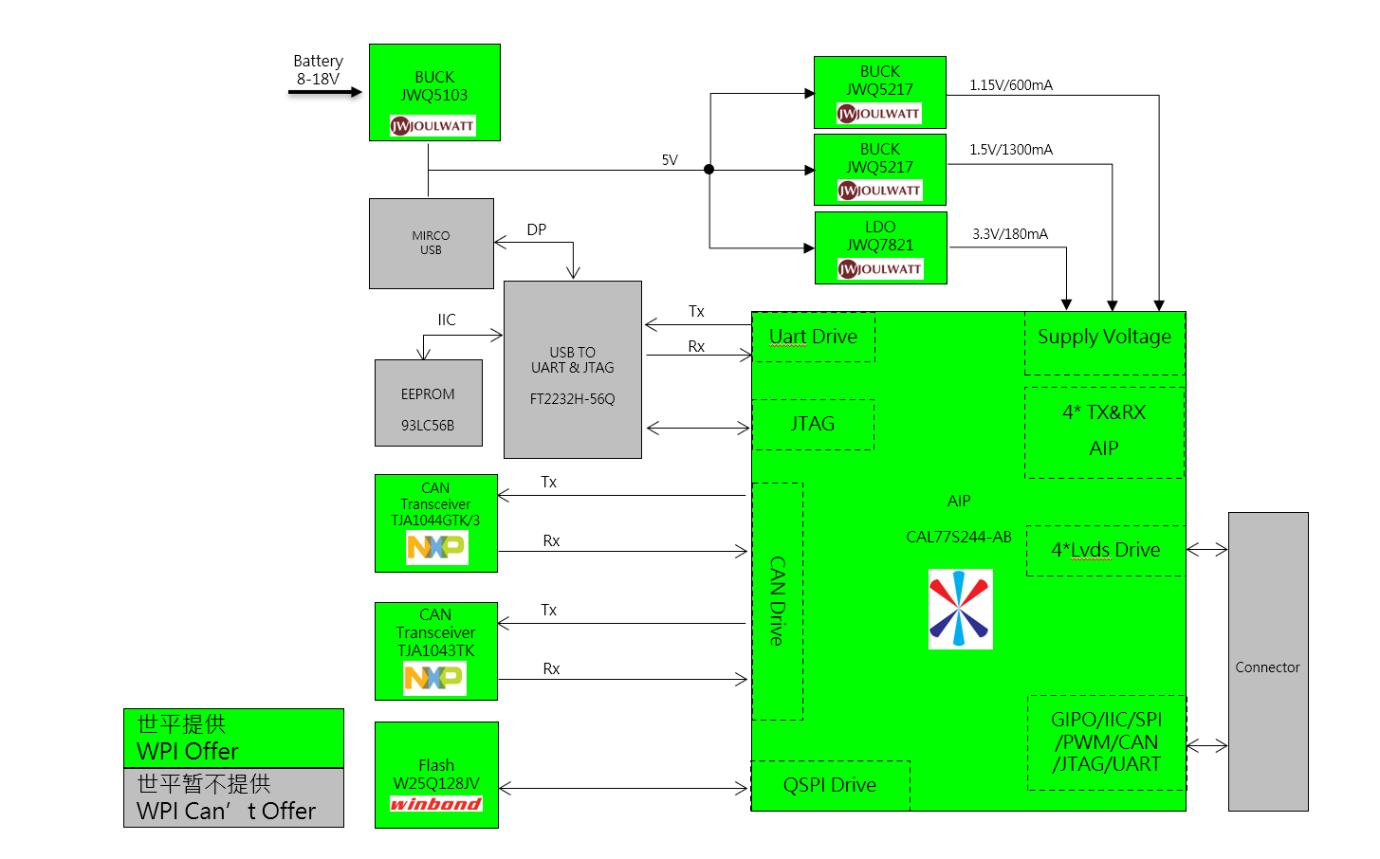
圖一 方案框圖
- 輸入電壓範圍: DC 8-18 V input or USB input
- SOC: ARC_EM6 32-bit 內核,主頻高達 300MHz ,ASIL-B 功能安全等級
- 輸出頻帶 76-77 & 77-81 Ghz
- 板載 JTAG ,接入 USB 即可仿真調試
- 可連接 CALTERAH 數據採集板採集原始數據
- 雙路 CAN 通訊,支持 Wake up
- 開發板尺寸 : 70 * 61.5 mm
開發板實物:

圖二 方案展示板
方案鏈接:https://www.wpgdadatong.com.cn/solution/detail/72684
2 CAL77S244-AB SOC SDK FILE NOTE
2.1下載的板級支持包包含以下文件
在加特蘭官網中選擇 Alps_Software_Release 下載後得到一下三個文件夾
- Firmware:示例代碼,包含 bootloader 、Alps_Firmwaer 2 個文件夾。
- FPGA: CALTERAH 數據採集板的燒錄 bin 文件。
- Tool:數據可視化的 GUI 上位機軟體(CalterahRadarAppMgmtToolSetup.exe)
如下圖所示:
圖三 加特蘭官網固件下載頁面

圖四 解壓縮後的文件目錄
2.2 SDK 軟體框架
CAL77S244-AB 這顆 SOC 採用 Freertos 操作系統,將 SDK 分為底層硬體(HAL)、系統服務層(SSL)、應用層(Application)。
- 底層:包括ARC、晶片、設備、電路板、外設、基帶和無線電部分。
- 系統服務層:包括操作系統內核、控制台、命令行接口(CLI)、CAN-CLI 和基帶任務。SSL 主要管理數據傳輸、通信協議和數據處理。SSL 中的 OS 內核模塊為其他系統服務、模塊和應用程序層提供了一些基本如組 M 件,UTEX、信號量和隊列。
- 應用層:用戶可以根據不同的場景選擇特定的雷達應用程序以及添加一些用戶自定的功能代碼,SDK 中提供了一個卡爾曼濾波演示源代碼,以輸出一些基本信息,包括範圍、速度、角度、功率等。
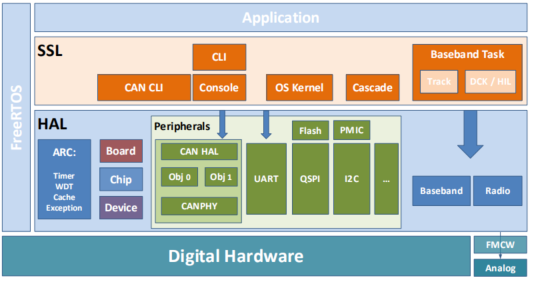
圖五 軟體框架
2.3 SDK 文件目錄
2.3.1 Alps_Firmware_Ver 文件夾說明:
- Calterah: 包含了引導程序和系統服務層的程序
- embarc_osc: 包含了 Freertos & Hal 庫。
- make_bin.py: python 編譯腳本

圖六 文件目錄
2.3.2 Calterah 文件夾
① bootloader : 引導裝載程序,引導加載程序是一個獨立的項目
② common :
- baseband: 基帶相關的框架函數
- can_cli: CAN 通信相關函數
- console: 基於 UART 的命令控制函數
- fmcw_radio: 無線底層的 API 函數
- sensor_config: 基帶配置文件 .hxx
- track:算法文件
③ freertos :
- common: 包含 UART 命令行和 Tick
- sensor: 雷達項目的主要功能,測試用例也在這個文件夾下
- validation: 驗證項目的主要功能,測試用例也在這個文件夾下
2.3.3 Embarc_osp 文件夾
① arc : Soc 核心硬體驅動:初始化組裝文件,緩存,定時器,看門狗,異常 api 等
② board: 包含 ref_design、ref_cascade和validation 文件夾。它們代表不同的項目,由編譯參數選擇
- ref_design: 單個雷達項目。包含編譯器腳本和 board.c。board.c 文件在開機後和 main.c 之前初始化
- ref_cascade: 多個雷達項目級聯
- validation: 驗證項目。包含 ref_design 類似相關的項目,用於測試 HAL 驅動程序是否能正常工作
③ chip :
- common: Soc 延遲函數的實現 ms-delay us-delay
- configs: Soc 底層寄存器定義
- drivers: Soc 底層寄存器驅動層與 IPC 驅動(核與核)
④ device :
- ip/ip_hal: HAL 層驅動程序,這是較高的層驅動程序
- ip/designware: PHY 層驅動程序,這是較低的層驅動程序
⑤ options: make 文件
⑥ os : FreeRTOS 源代碼
3、API 的使用
在《Alps_ED_SC_REVMP_FirmwareReferenceManual.PDF》詳細介紹了 Alps 系列 SDK 的外設應用說明。如:
- 在 Freertos 操作系統下外設初始化 & 調用的步驟。
- 相關 API 函數如何使用。
- 調用 API 函數時的注意事項。
- API 函數應用相關的邏輯功能框圖。
4、總結
本文介紹了基於加特蘭 CAL77S244-AB 的短距雷達方案 SDK 的簡要說明,主要介紹了關於 SDK 的軟體框圖,目錄文件結構,API 的使用等相關介紹。
5、參考文獻
(1) Calterah-Alps-CAL77S244-AB-Datasheet_v1.0.4
(2) Alps_ED_SC_REVMP_FirmwareReferenceManual
歡迎在博文下方留言評論,我們會及時回復您的問題。如有更多需求,歡迎聯繫大聯大世平集團 ATU 部門:atu.sh@wpi-group.com
作者:Better Yang / 楊琰傑
評論
dadatong_214789
11 天前
dadatong_214789
11 天前