

1. 前言
一般電源在 DC-DC 降壓控制分成電壓環與電流環,電流環的速度一定會比電壓環快,對於輸出的濾波電容,電壓是電流的積分,所以電流環的結果要經過好幾個週期後才會在電壓訊號有反應。
電壓模式控制是將實際的輸出電壓值當作反饋信號,與命令電壓相比計算出誤差值,將誤差值輸入 PI 控制器,然後由 PI控制器輸出相對應的 PWM duty 來穩住輸出電壓。
電壓模式控制有個缺點,因為只有單一電壓環路,當輸出電壓或負載有任何變化都必須經過回授再由電壓環路來校正,它的響應速度會比較慢。
所以對於負載變化較大的條件下,電流模式控制的響應速度會比電壓模式快速,讓輸出電壓穩定。
但是峰值電流模式控制當 PWM Duty設計大於 50% 時,當有一個擾動 ( 例如負載變化 ) 會發生次諧波震盪,導致不穩定,以下會用電感電流與PWM 的關係圖來說明 PWM Duty 大於 50% 時為何會發生次諧波震盪以及解決辦法。
2. 峰值電流控制 : 次諧波震盪 ( Sub-harmonic Oscillation )
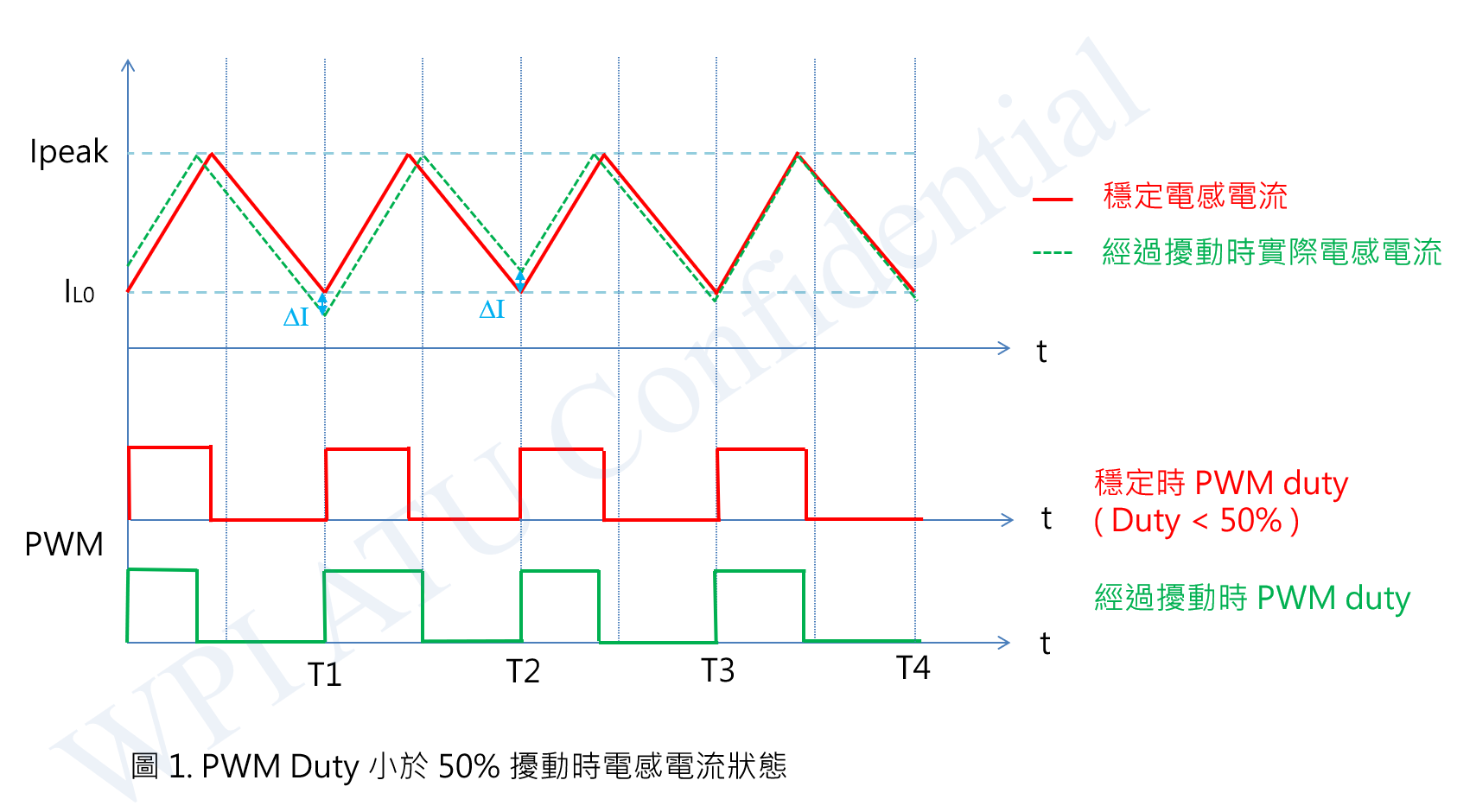
峰值電流模式控制當操作在PWM duty cycle 小於 50% 的條件下 ( 如下圖 1 ),原本在一個穩定的電感電流波形 ( 紅色實線為電感電流 )。負載如果有變化,電感電流受到一個擾動 ( 綠色虛線 ),經過幾個 PWM 週期後,擾動就會自動收斂趨近為零,讓系統維持在穩定的狀態。
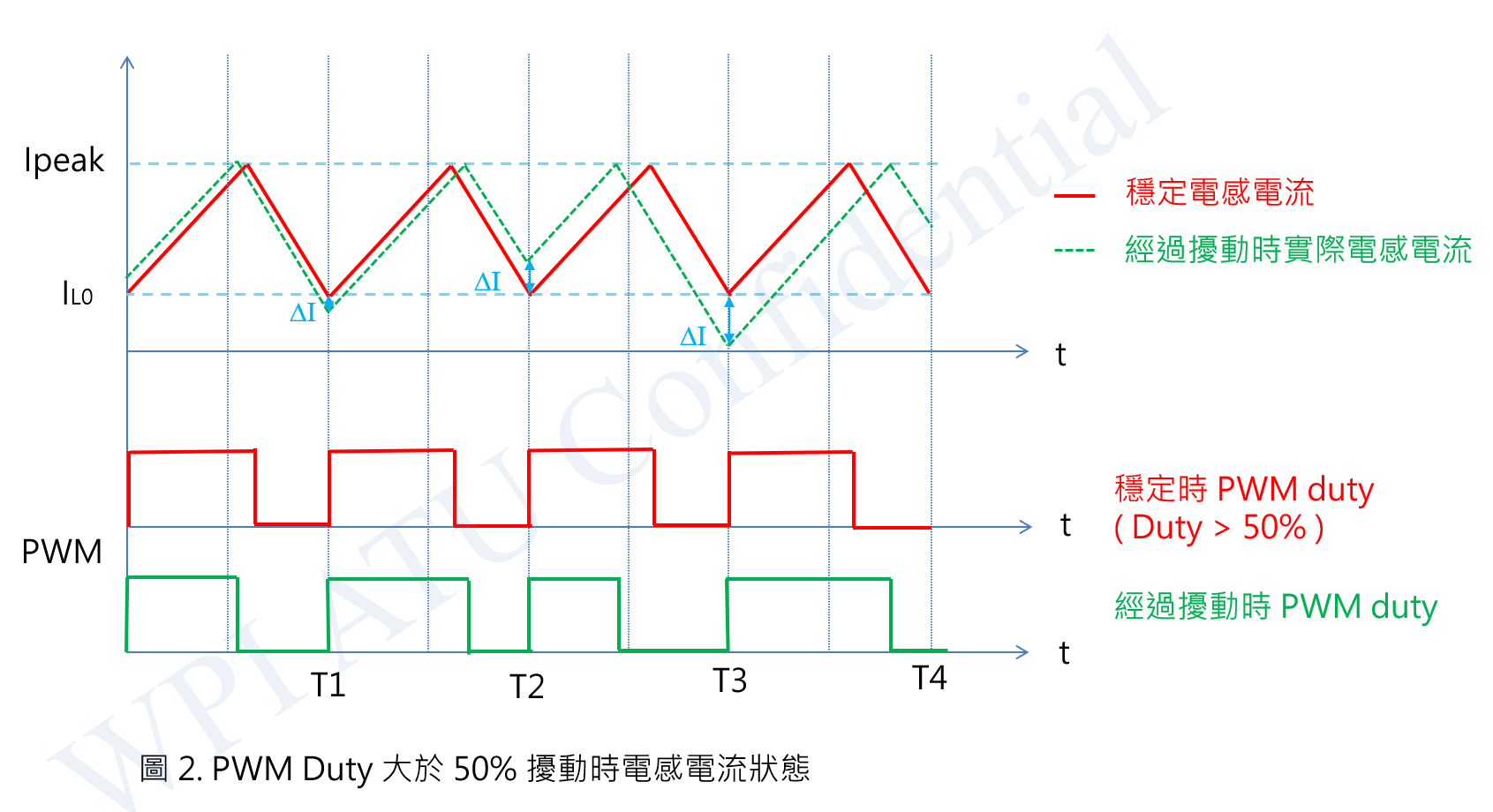
峰值電流模式控制當操作在PWM duty cycle 大於 50% 的條件下 ( 如下圖 2 ),當有負載變化造成 PWM 控制的擾動,經過幾個 PWM 週期後,實際電感電流與穩定電感電流誤差會越來越大 ( ∆I 會越來越大 ),造成 PWM duty 有大小波的現象,造成系統不穩定,這個現象我們稱為次諧波震盪 ( Sub-harmonic Oscillation )。
3. 峰值電流控制 : 斜率補償 ( Slope Compensation )
電流控制模式雖然優於電壓模式控制,但是在 PWM Duty 大於 50% 時會產生次諧波震盪( Sub-harmonic Oscillation ) 導致系統不穩定。要解決次諧波帳盪造成的系統不穩定況狀,我們可以加上斜率補償 ( Slope Compensation ) 技巧來解決次諧波震盪問題。
斜率補償的作法是在控制電路中加入斜率補償電路,或是透過 MCU 內部產生負斜率訊號,在PWM 週期開始時加入一個負斜率訊號,再與實際的電感峰值電流訊號做比較,使電流控制模式的 PWM Duty 大於 50% 時一樣可以穩定動作,不會造成PWM Duty 變化過大導致無法收斂。
如下圖 3,當PWM Duty大於50% 時加上斜率補償功能,如果有一個擾動 ( 例如負載變化 ),電感電流經過幾個週期之後會自動收斂回復穩定。
4.總結
在電源應用裡面,很多時候都會使用到峰值電流模式來做控制,補償速度會比較快。
但是使用峰值電流模式控制當 PWM 週期大於 50% 時,系統就會開始震盪不穩定,發生次諧波震盪 ( Sub-harmonic Oscillation ),而解決的辦法就是加入斜率補償 ( Slope Compensation ) 功能來解決次諧波震盪。
此篇文章就用 PWM 與電流圖示讓讀者理解次諧波震盪 ( Sub-harmonic Oscillation ) 與斜率補償 ( Slope Compensation ) 基本觀念。
評論