

作者:英飛凌工業半導體 王建淵 顏肅
隨著現代工具機向高速、高精度方向發展,對工具機主軸的技術要求越來越高。電主軸作為高速工具機的重要組成部件之一,因其轉速高、體積小和優異的動態性能等特性,可有效提高工具機的動態平衡,避免了振動和噪聲。主軸電機放置在工具機的主軸單元內,直接驅動負載。因此,簡化了傳統的機械驅動結構,實現了“零驅動”。由於電主軸的廣泛應用,推動著電機主軸系統向高精度、高速、低能耗、高效率、高可靠性的方向不斷發展,成為目前世界各國研究的熱點。
在現代電主軸、機軸一體化的趨勢下,要達到高速度和小型化的要求,會增大感應電機的銅耗,出現過熱、磨損嚴重的現象,導致電機性能不足。隨著永磁同步電機的發展,高速永磁同步電主軸應用愈加廣泛。高速永磁同步電主軸與傳統異步感應電機相比,由永磁體提供氣隙磁場,具有功率因數高、體積小、效率高等優點,在高速磨削系統、高速離心空壓機等領域有著廣泛的應用和發展前景。
高速永磁同步電機(High-Speed Permanent Magnet Synchronous Motor , HSPMSM),通常指額定轉速超過10000r/min以上或者指困難係數(轉速與功率平方根的乘積)處於(1~10)×105r/min√kw範圍內的電機,其控制性能決定著系統工作效率、運行穩定性、壽命以及可靠性等方面,而控制特性也依賴於電路設計和驅動器中的功率半導體性能,尤其SiC逆變技術的引入使得HSPMSM驅動器的性能有了長足的進步。
本文將介紹由西安理工大學電氣工程學院王建淵老師課題組搭建的一款基於IM828-XCC的高速電機驅動器,用於驅動一台額定轉速15000r/min,額定功率2.2kW的高速主軸電機,以實現對高速電機的高性能控制,具有高功率密度、高效率和低熱耗散等特點。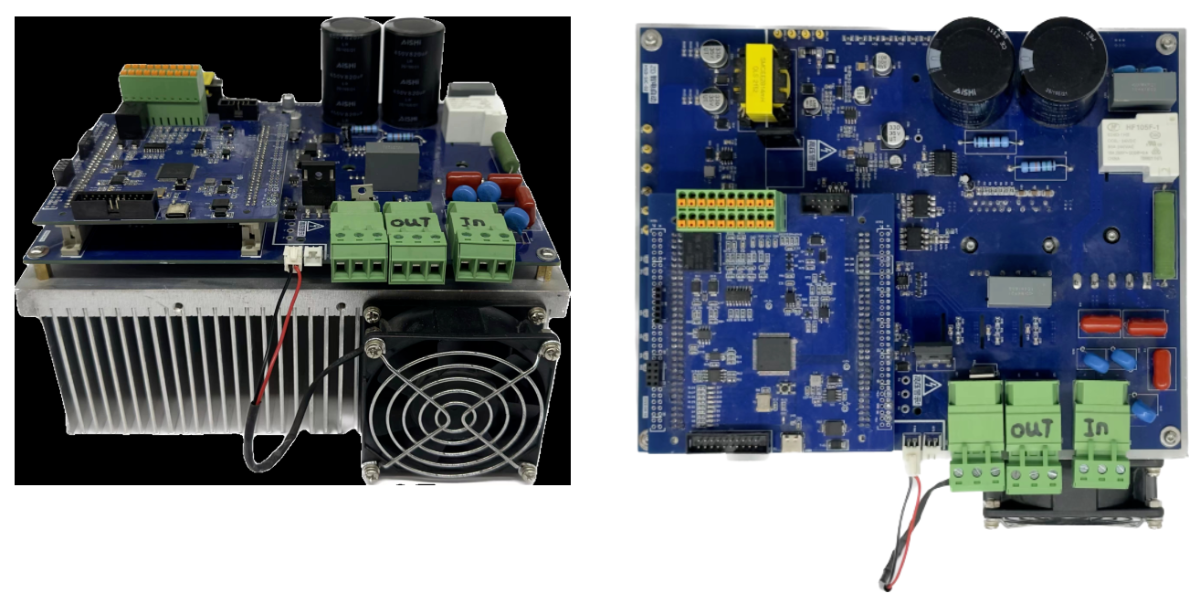
本項目設計的高速永磁同步電機驅動控制系統需實現的主要功能有:實現電流和電壓等信號的採樣處理與控制;實現高速永磁同步電機無傳感器的轉速閉環控制;實現對電機運行狀態的速度、定子電流、電壓、功率器件工作溫度等相關數據的監測,方便電機運行狀態的檢查與後期維護。
高速永磁同步電機驅動控制系統要求電機起動平穩、速度穩定和可調速範圍廣,根據高速永磁同步電機的主要參數來設計其驅動控制系統的技術指標要求如下:
1. 驅動器最高輸出功率:4kW;
2. 電機速度控制穩態精度:±0.5%;
3. 驅動器保護功能:具備過壓、過流、過熱等故障診斷及保護功能。
一、CIPOS™ Maxi IM828簡介
高速電機因其轉速高、基頻高的特點,對相應的驅動技術提出了更高要求,若開關頻率過低時,會導致驅動器輸出電壓波形質量較差,隨著轉速升高,控制延遲及時間延遲也會隨之加大進而影響控制精度。本課題所設計搭建的高速電機驅動器選用英飛凌公司生產的IM828-XCC,其採用SiC MOSFET組成橋式單元,具有優良導熱性能,適用於工業驅動、電機控制等工業應用。由於採用碳化矽技術,使其成為高速電機驅動領域的最佳選擇。
IM828-XCC具體分為以下幾個功能單元部分:
1. 逆變部分:採用1200V CoolSiC™ Mosfet的三相逆變器與優化的6通道SOI柵極驅動器相結合,具有優異的電氣性能,採用CoolSiC的逆變單元,導通損耗小,開關特性優異。
2.保護功能:過電流關閉,內置NTC熱敏電阻用於溫度監測,所有通道的欠壓鎖定,低側源引腳可用於所有相電流監測,保護期間6個開關全部關閉。
3.其他功能:允許負VS電位高達-11V,用於VBS=15V的信號傳輸,集成自舉功能。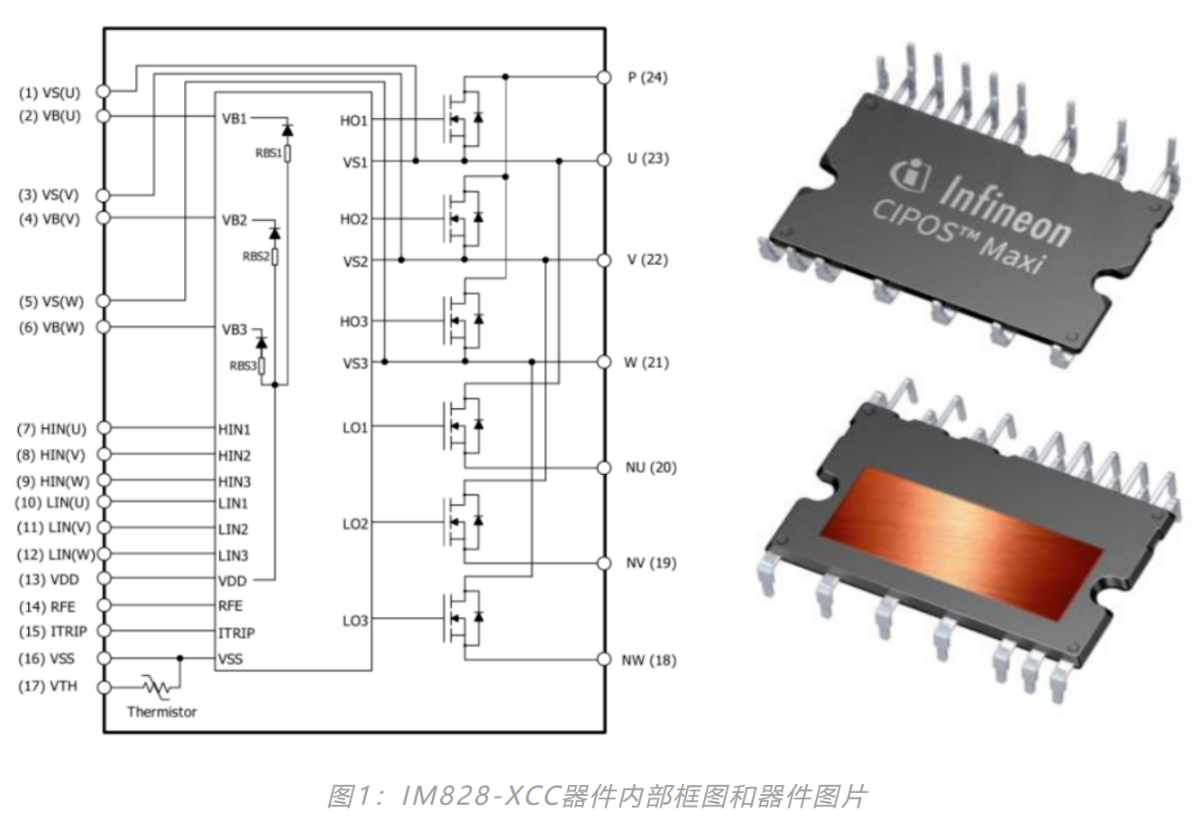
二、驅動器設計
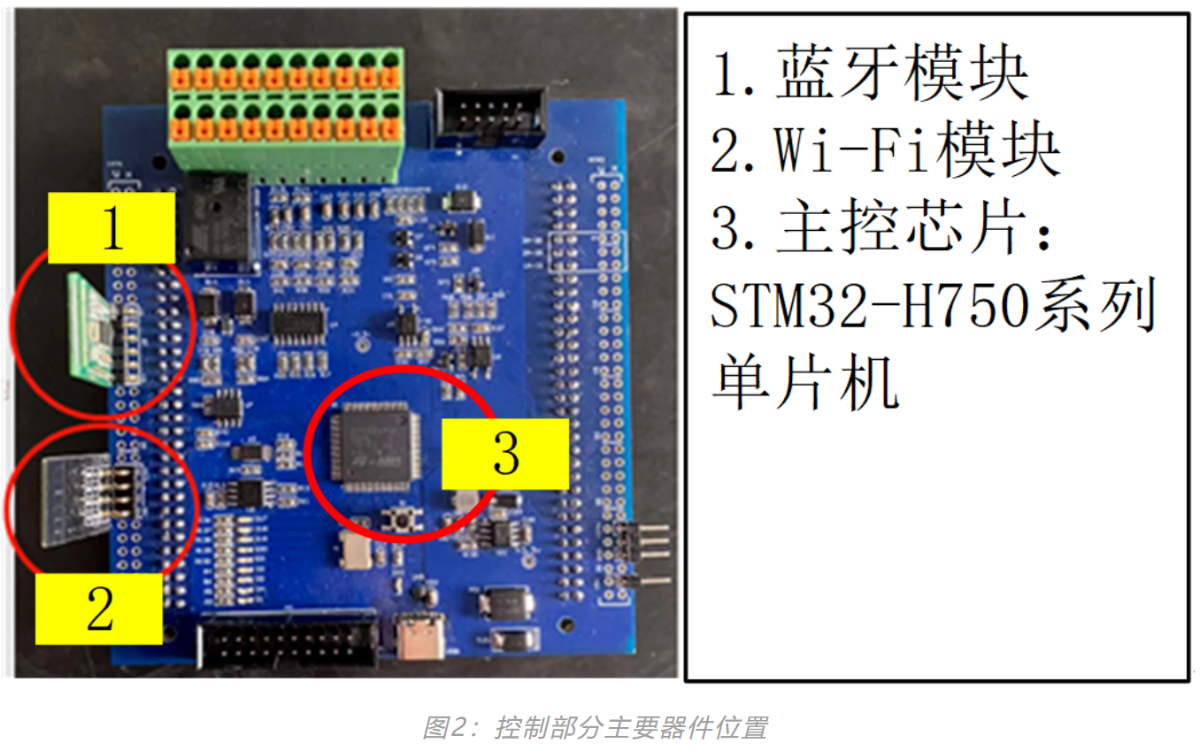
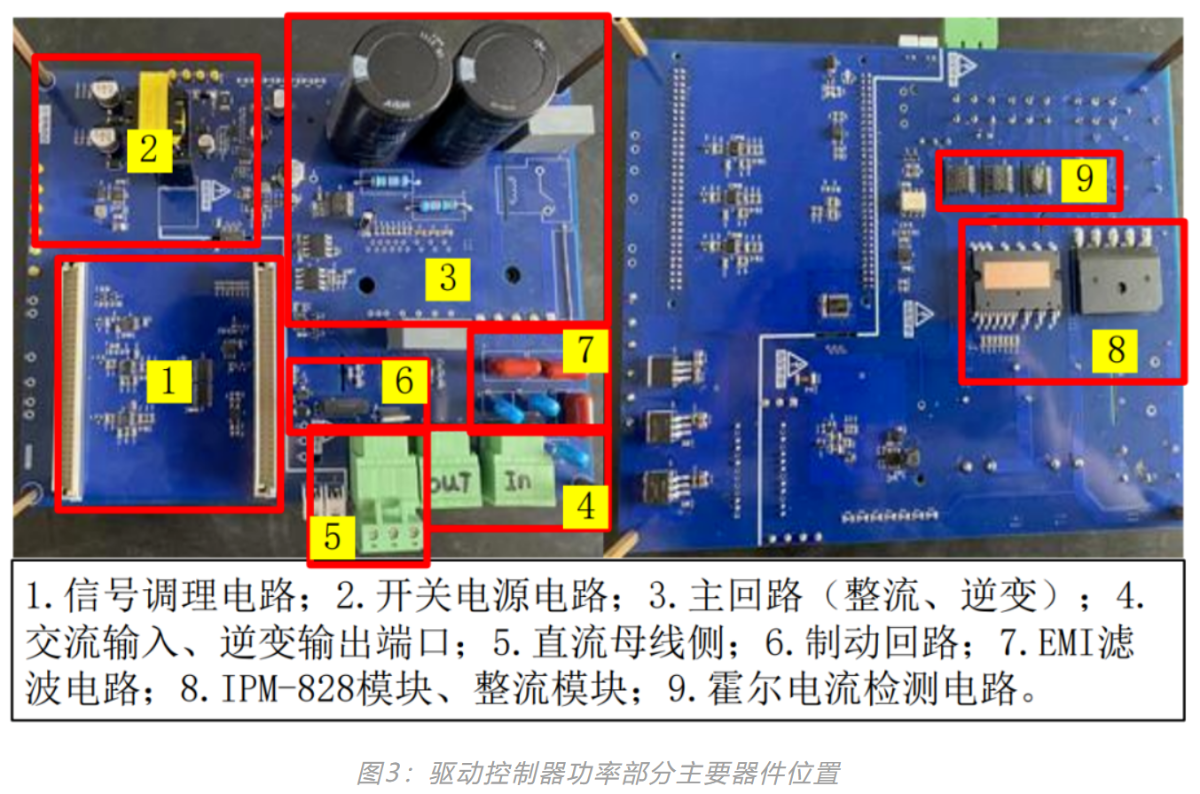
為了充分展示IM828的出色性能和優秀特點,設計了一款4.0kW的驅動器,圖2所示為控制板部分,圖3所示為功率板部分。
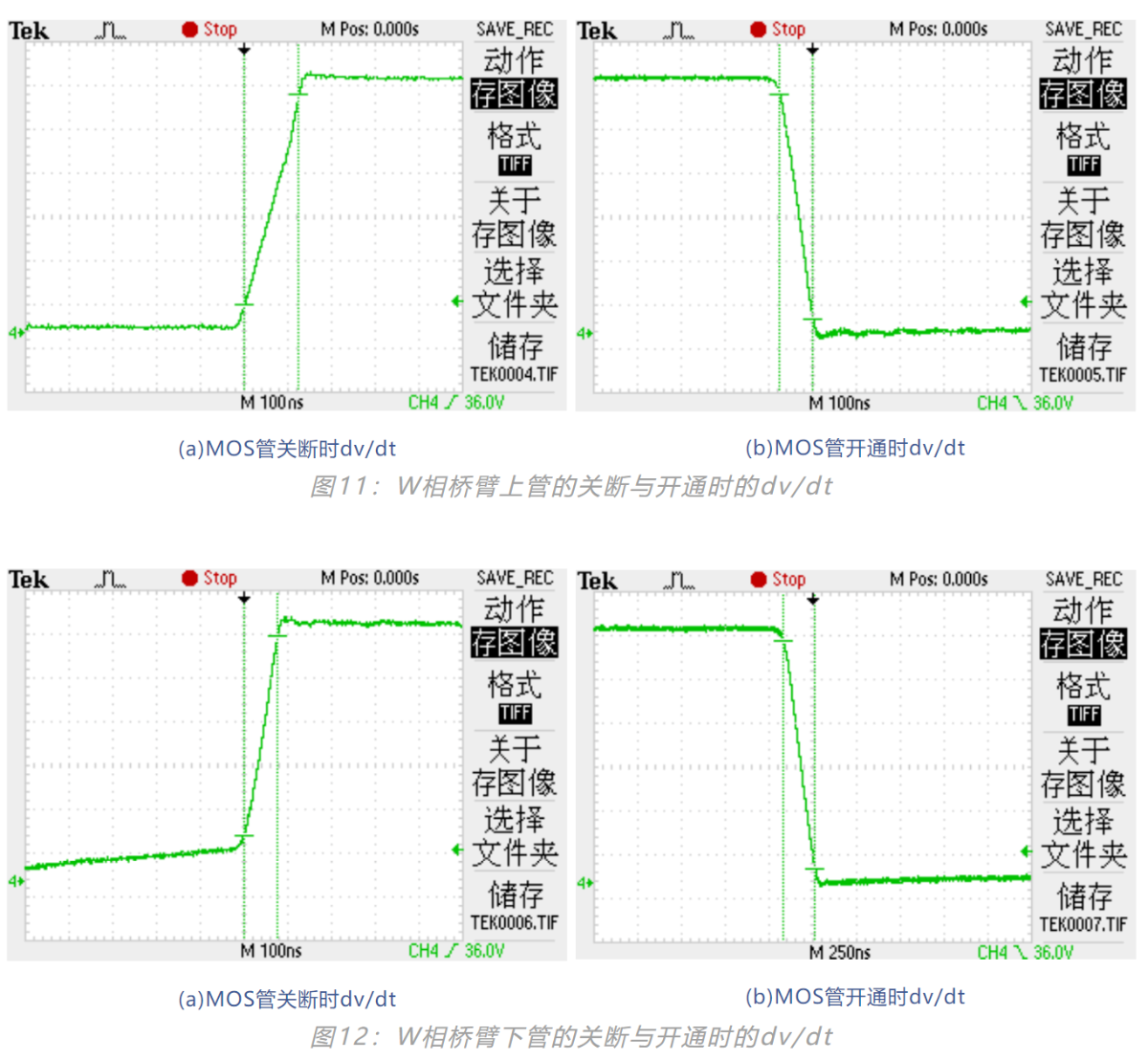
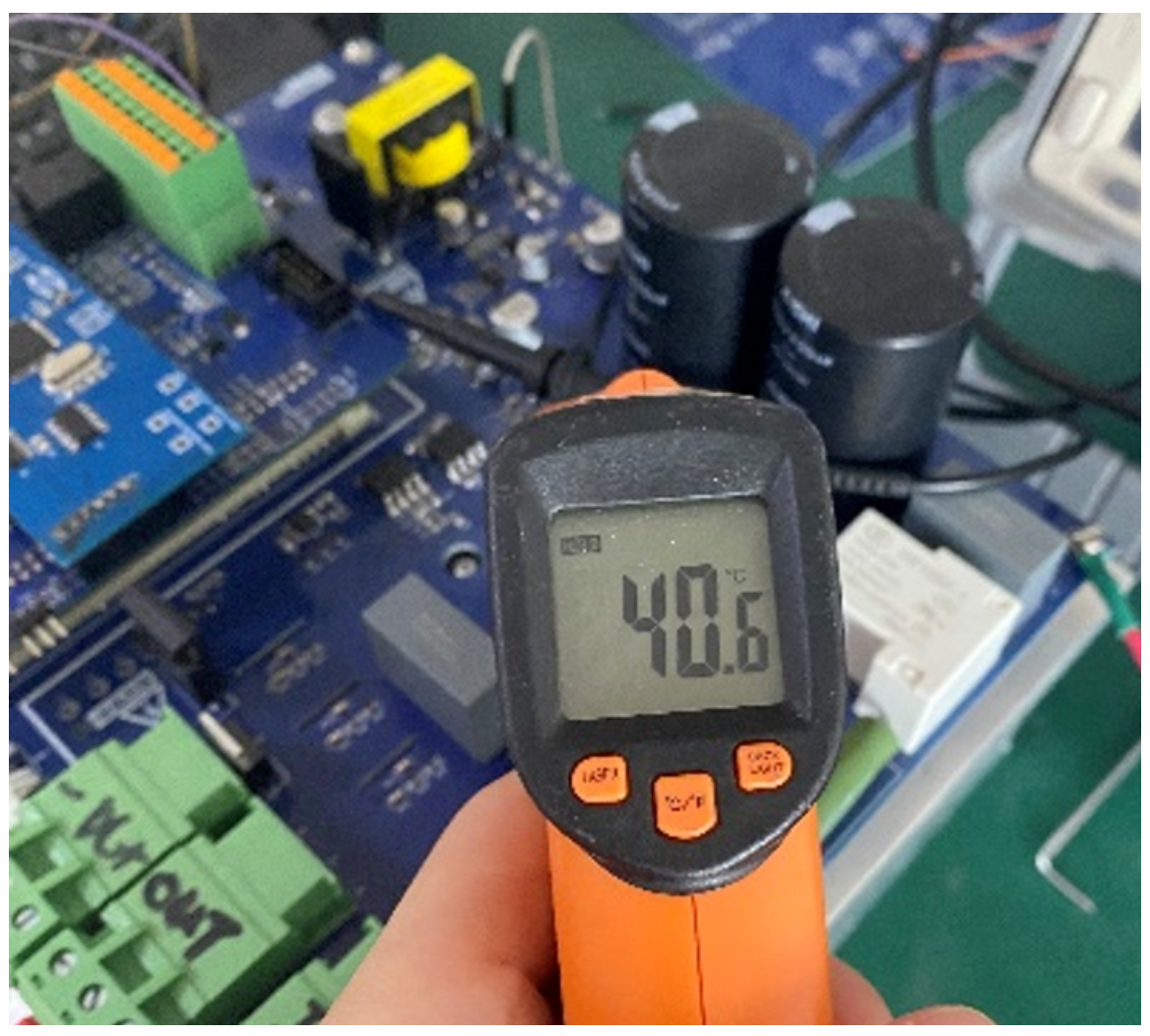
為了驗證驅動板的性能,測試了在不同工況下IPM的開關特性對電機運行的影響,通過三相調壓器對平台供電,被控電機是義大利YSA公司研製的高速主軸電機,電機具體參數如表1所示。電機控制方式為有速度FOC,如圖4所示為IPM的W相橋臂開關管的dv/dt。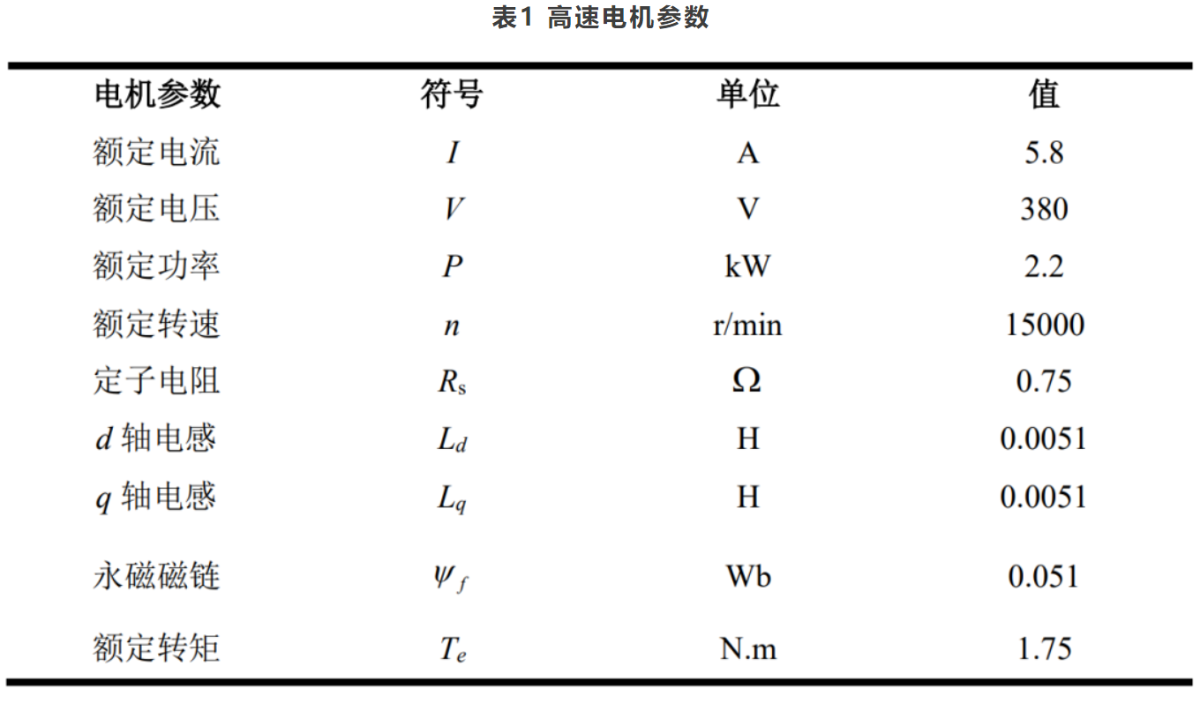
■實驗工況一
在空載運行條件下分別進行了fs為20kHz和fs為60kHz工況下的性能測試。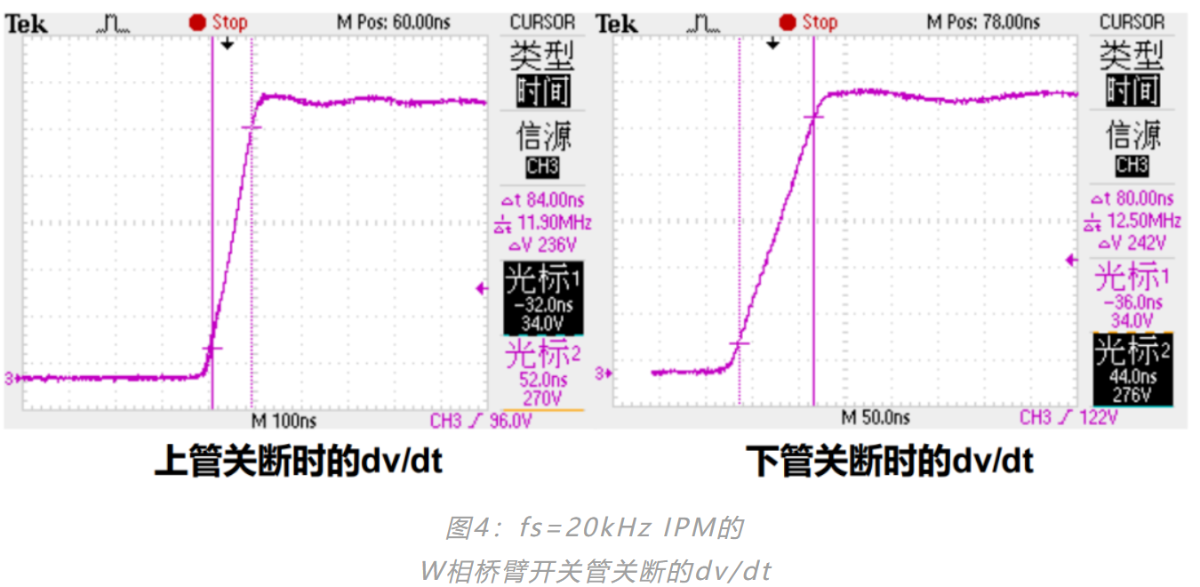
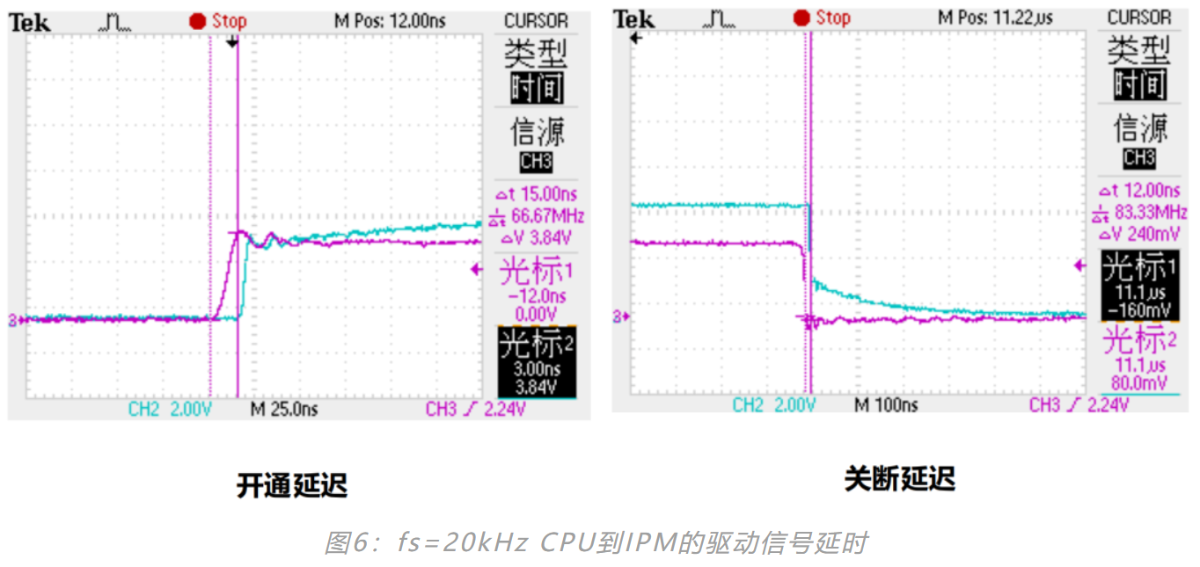
根據測試波形可以得到關斷時上管的dv/dt為2809V/us,下管的dv/dt為3025V/us。同時也對IPM的導通與關斷延時進行了測試,測試結果如圖5所示,並對MCU到IPM的驅動信號延時進行測試,測試結果如圖6所示。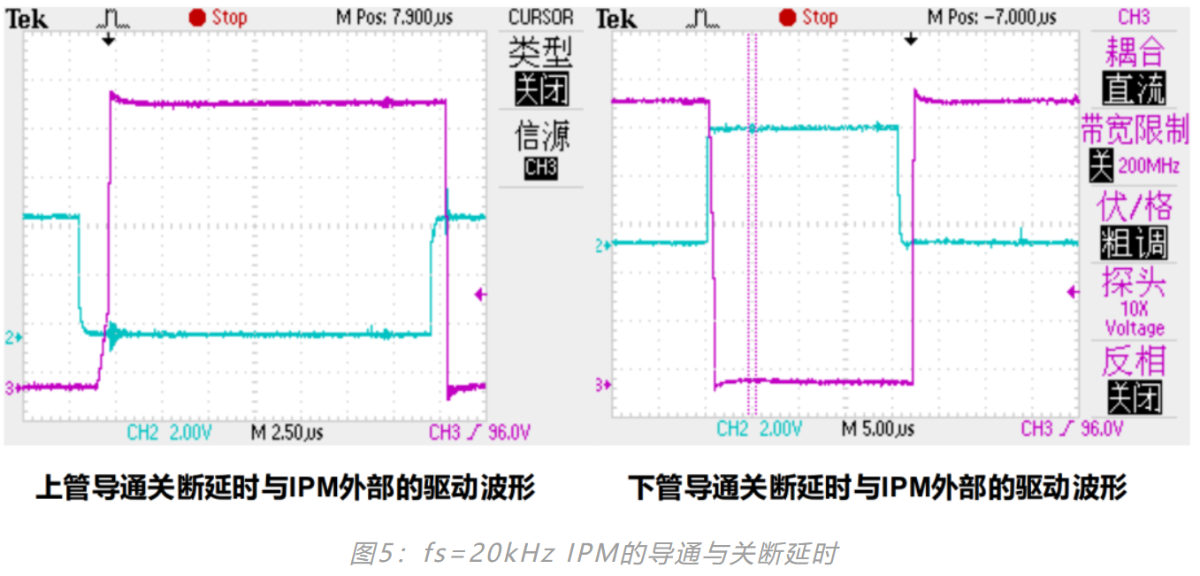
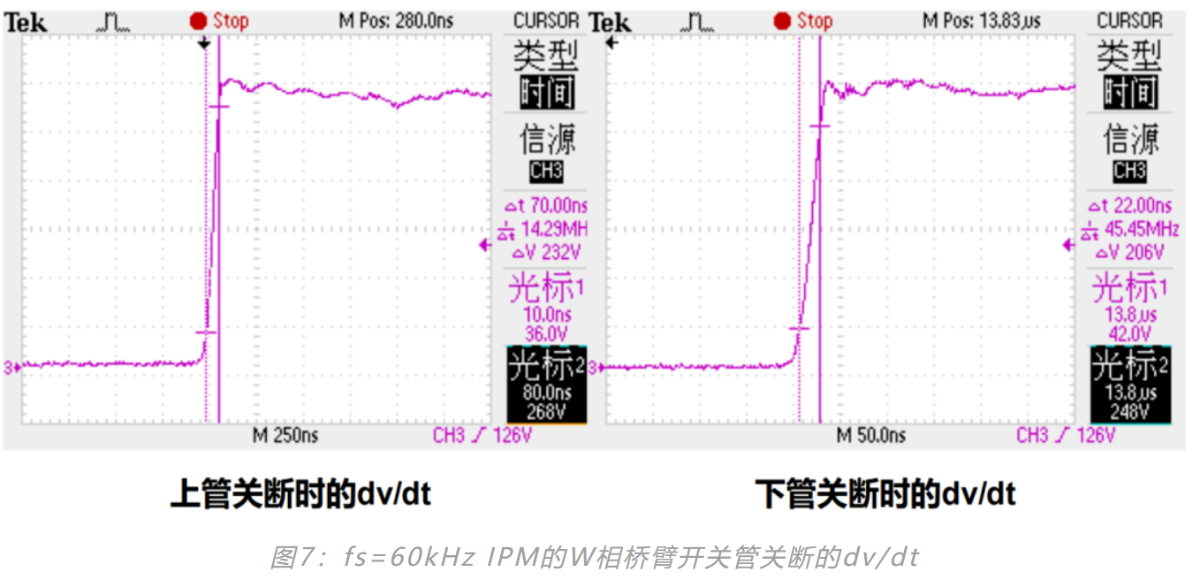
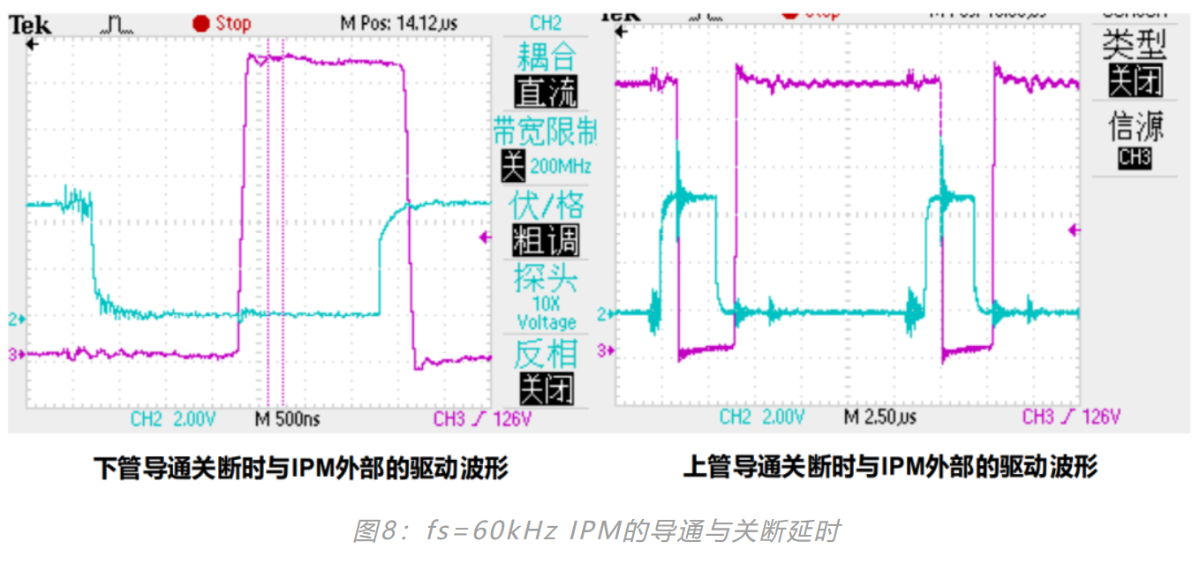
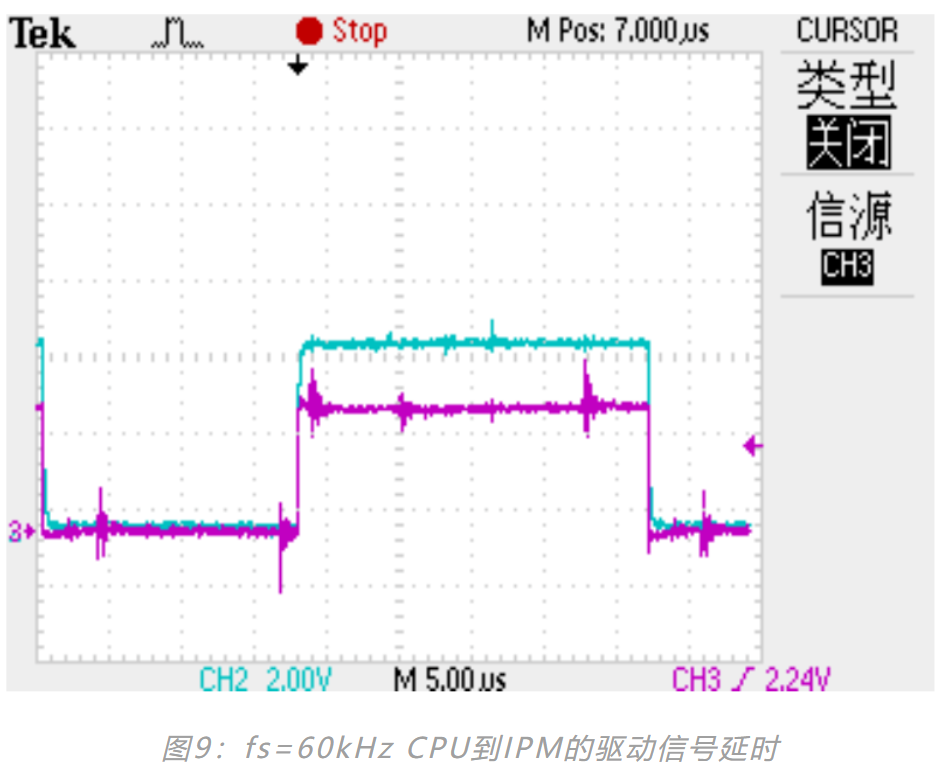
同時,為了體現IPM_828-CXX在高開關頻率下的特性,在開關頻率為60kHz下也進行了相關波形採集,如圖7-9分別為在fs=60kHz下的W相橋臂開關管關斷時的dv/dt、IPM的導通與關斷延時、MCU到IPM的驅動信號延時。
■實驗工況二
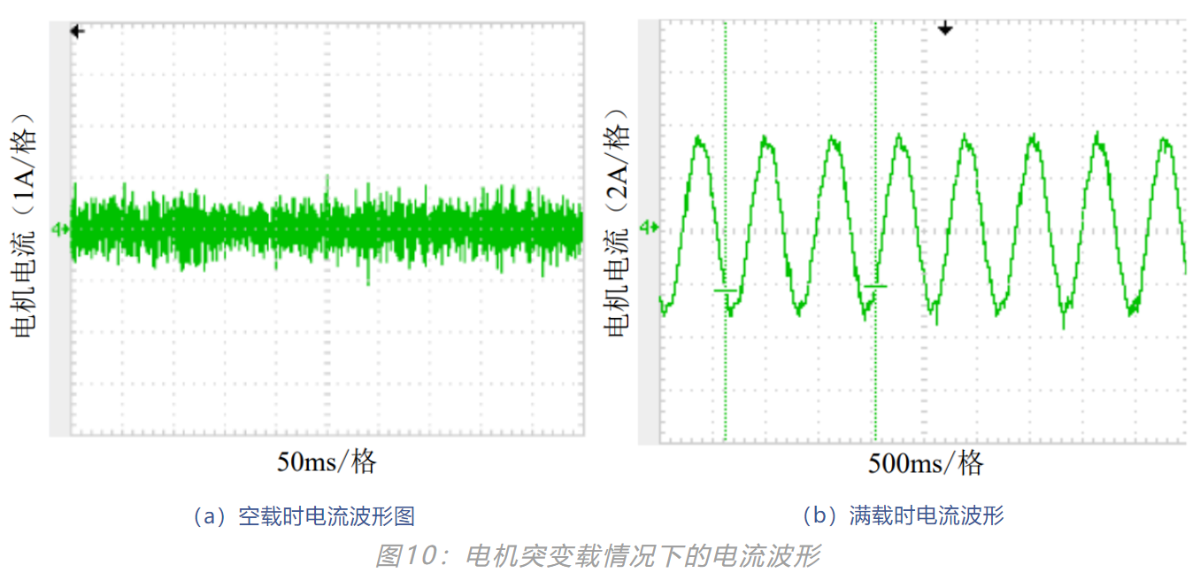
電機空載啟動,給定轉速1000r/min,穩定運行時突加滿載TL=1.75N.m,開關頻率fs=30kHz,電機的相電流如下圖10所示,其中圖(a)為空載運行時的電流波形,圖(b)為滿載運行時的電流波形,可以看出電機在空載情況下運行時,輸出電流在0A附近波動;電機在滿載情況下運行時,輸出電流穩定,實驗結果也驗證了本課題所設計搭建的實驗平台具有良好的驅動性能。
此時IPM中W相橋臂的dv/dt波形如下:

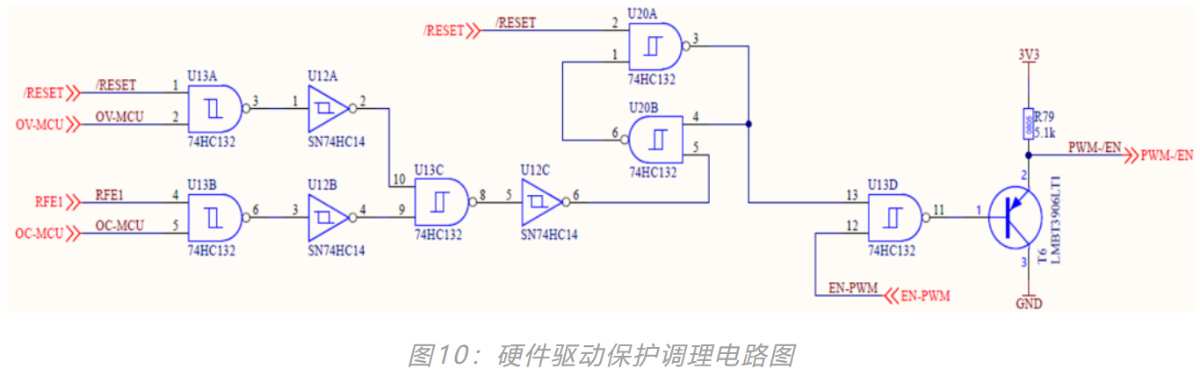
當電機系統穩定運行15分鐘,在環境溫度為21℃的條件下,用手持的溫度測試儀測得晶片附近的溫度為40.6℃。
三、系統設計要點及經驗分享
1. 硬體驅動保護調理
硬體驅動保護調理電路具有以下保護功能:
-
MCU復位;
-
母線過壓;
-
母線過流;
-
IPM復位信號(VDD欠壓、ITRIP過流);
-
Enable_PWM。
故障時,PWM-/EN引腳輸出為高電平,74LVX4245停止輸出;正常時引腳輸出為低電平。
2. 散熱器設計
高速電機驅動控制器尺寸較小,功率較大,如何將熱量快速散去也是整體設計的難點之一,根據圖11所示得設計原理,考慮到IPM_IM828-XCC的位置,需要在IPM以及整流橋各加裝墊塊,IPM墊塊是為了保證IPM和散熱器之間的爬電間距和安全距離。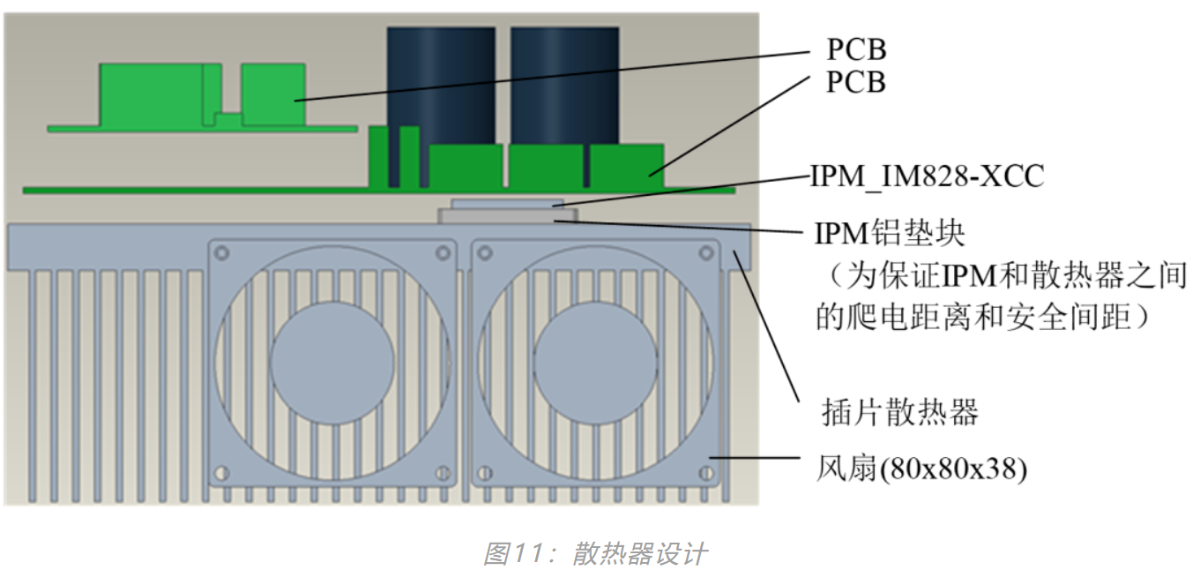
3. 熱保護設計
在驅動控制器溫度過高,超過了設定值,會起到保護作用。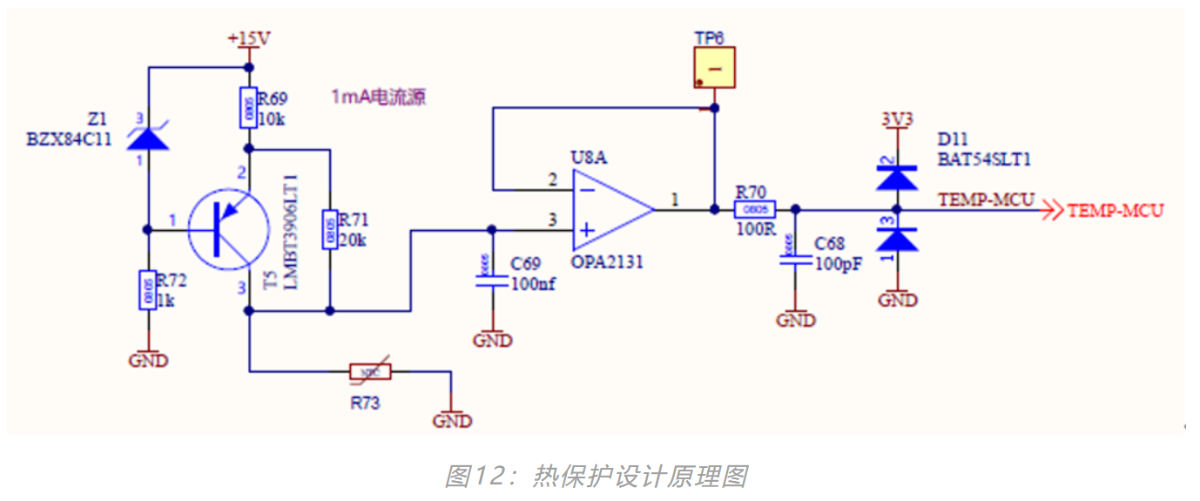
上圖所示的溫度檢測電路,其基本原理是利用NTC熱敏電阻(5KΩ,精度)的阻值變化特性,連接到PNP管構成1mA的恆流源電路中,即可檢測熱敏電阻上的壓降變化,經過電壓跟隨器與RC電路輸入到MCU,通過軟體實現過溫保護。
在本文所提及的熱保護設計方案中,考慮到熱敏電阻安裝部位與晶片之間存在傳導熱損失,故設置過溫保護點為90℃,此時根據NTC熱敏電阻阻值變化特性表,此時阻值為,MCU側的輸入電壓為0.6V左右,通過DAC模塊讀取電壓之後經過軟體程序的比較,輸出保護信號,進而封鎖驅動信號,保護器件。
參考文獻
[1]Datasheet of Infineon CIPOS™ Maxi IPM IM828-XCC
[2]Wu S, Tian C, Zhao W, et al. Design and analysis of an integrated modular motor drive for more electric aircraft[J]. IEEE Transactions on Transportation Electrification, 2020, 6(4): 1412-1420.
原文鏈接:https://mp.weixin.qq.com/s/LvlG7eWkFNe9f8ZE3WFCIA
掃描二維碼關注英飛凌工業半導體微信
評論