

1、 前言
東芝 TMPM343 MCU (以下簡稱 M343) 除了使用 Cortex M3 的核心,也包含了一個 MCD (Motor Control Driver) 做為直接驅動 STM 及 VCM 馬達的驅動器;主要應用於 IP-CAM 或視訊會議產品中 Lens 馬達的驅動。
本文主要介紹使用 Zoom / Focus Lens 位置檢測的方式。
下圖為 M343 控制 Lens 的方塊圖,紅色框線的部位為M343 控制 Zoom 及 Focus 的 STM驅動單元。 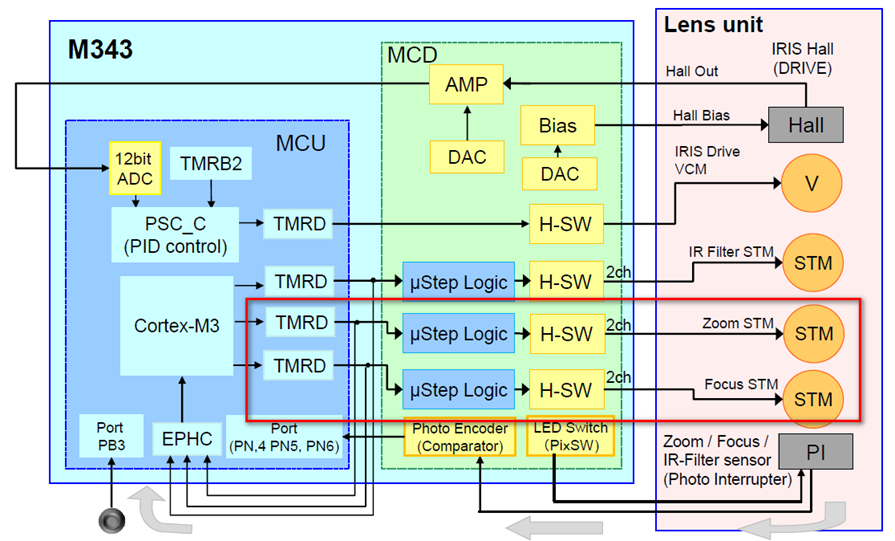
專有名詞釋義:
Zoom --> 影像的放大及縮小。
Focus --> 影像的對焦。
STM --> 完整名稱為 Stepping Motor ,作為自動對焦與影像縮放的鏡頭驅動,通過簡單的機械結構可獲得啟動、停止的良好反應性。
通過導螺桿與減速齒輪,抑制了自動對焦時的動作聲音,適合短片拍攝的鏡頭驅動。
2、 Lens STM控制方法與的馬達介紹
M343 內建馬達控制裝置 MCD (Motor Control Device),可驅動鏡頭內的 Focus / Zoom 步進馬達。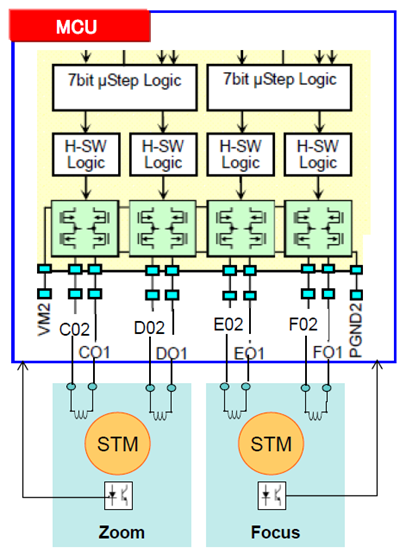
步進馬達按照一定的角度轉動,通過脈波信號的操作,就可簡單實現高精度的定位,並使工作物在目標位置高精度地停止。
步進馬達是以基本步級角的角度為單位來進行定位,步進馬達也可能移動不到一個整步;
這個過程稱為「微步進」(microstepping),主要透過調節流經繞組的電流而完成,如此就可以在整步之間定位轉子。
由 MCU 的 Timer 產生 PWM 波形,傳送到 MCD,再由 7-bit uStep 邏輯做微步的驅動控制,再經由 H-SW 切換開關控制步進馬達轉動。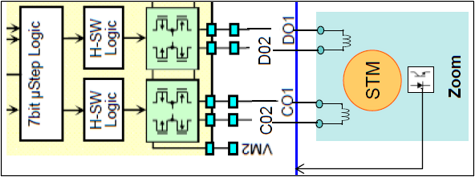
以下是不同的步進方式控制馬達的差異:
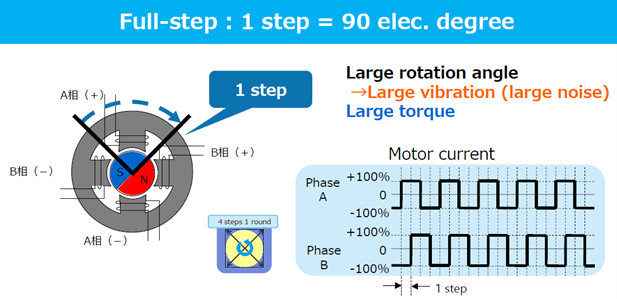
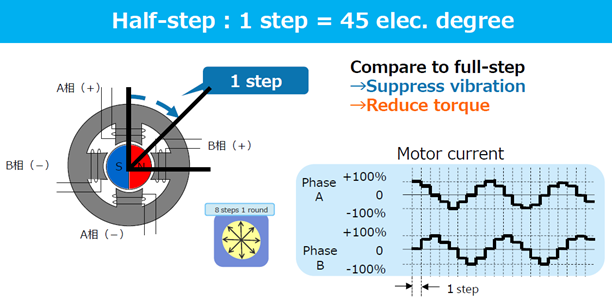

當步進馬達的步進角越大時,馬達所生成的力矩也越大,但噪聲也隨之加大;
當步進馬達的步進角越小時,馬達所產生的力矩也越小,但噪聲也隨之減小。
步進馬達適當的激勵模式選擇取決於→ 扭矩和靜音要求

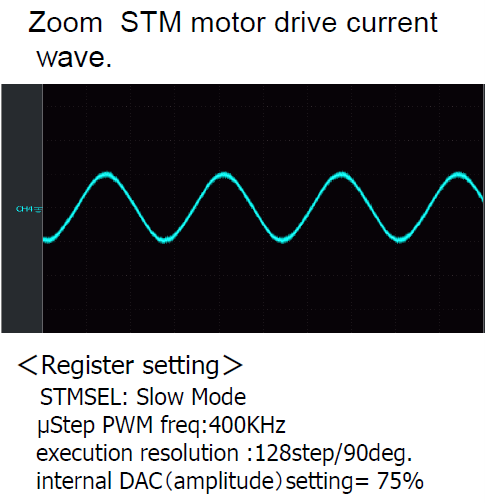
透過微步驅動器控制馬達轉動,微步步數越多,電流量測到的波形越趨近於弦波,如此可有效地降低振動與噪音。
3、 Lens 初始位置的檢測方式
Lens 初始位置的檢測方式如下:
Lens 的基座會連接一個擋板 (Shield);
檢測時,MCU 會點亮發光二極體,並且驅動步進馬達轉動螺桿使 Lens 朝一個方向移動,由 MCU 的計數器紀錄 Lens 前進的步數;
此時,擋板也會隨著 Lens 一起移動。
發光二極體的光,由光遮斷感測器 (PI,Photo Interrupter) 感測,目的在檢測 LED 的光是否被擋板遮住。當 PI 輸出發生變化時,表示 LED 的光已被擋板遮住;此時計數器所計數的步數則被初始化為 R-pos 的值,此時該點將設定為鏡頭的初始位置。
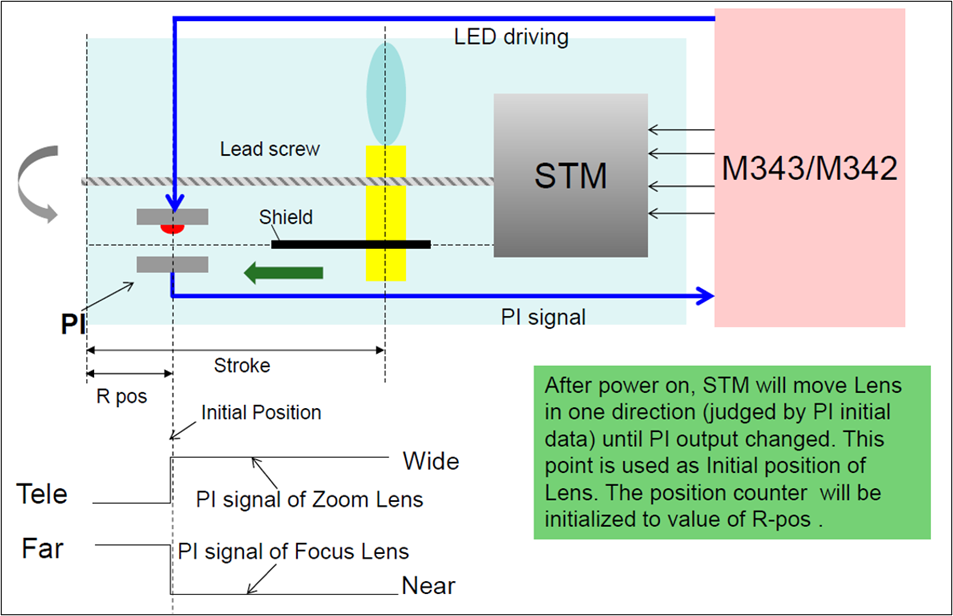
Tele : 長焦
Wide : 廣角
Far : Lens 拉遠
Near : Lens 拉近
Stroke : 固定行程
4、 M343 的 Focus 與 Zoom PI 線路
下圖是 M343 的 Focus 與 Zoom PI 的參考線路。
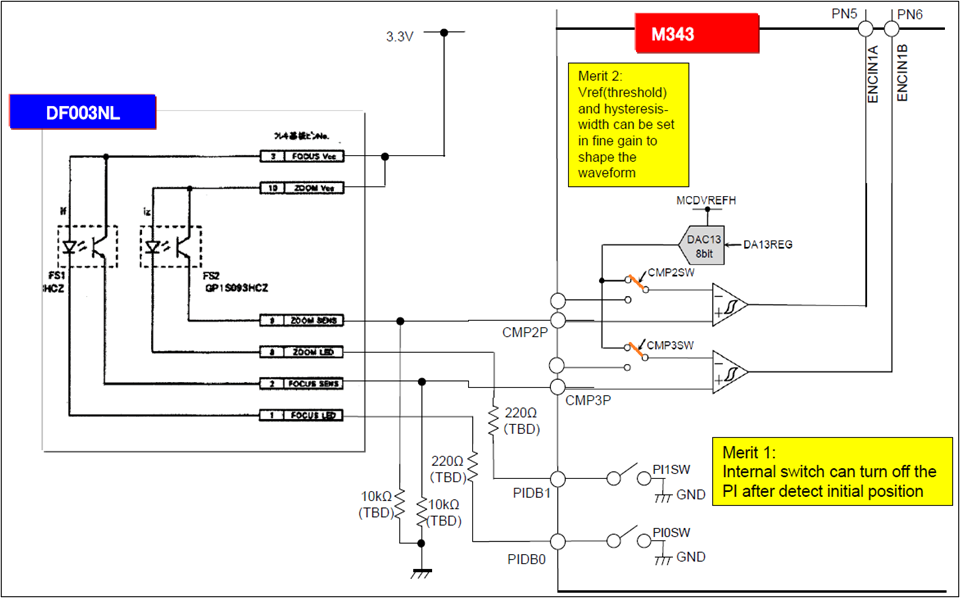
M34x 檢測 Focus / Zoom 初始位置參考線路的優點:
1. Vref(閾值)和遲滯寬度可以在增益中設置以塑造波形
2. Lens 的位置檢測完之後,可由內部開關 (PI0SW、PI1SW) 關閉發光二極體,以達到省電的目的
5、 各種型號 Lens 控制的規格以下是各型號 Lens 的 Zoom / Focus 在 64 微步的規格,提供參考!
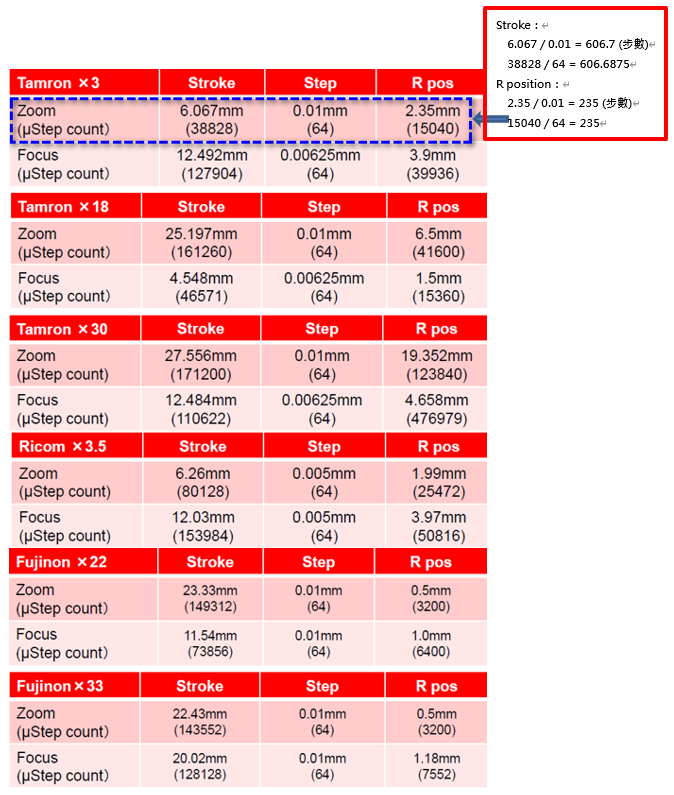
PS:以上圖片擷取自東芝原廠 M343 presentation file!
參考資料:
1. 東芝 MCD 訓練教材: Self study textbook of Toshiba MCD_2020_en_r.pdf
2. 東芝文件: All-Appli note for Tamron Fujinon Ricom_20150106.pdf