在走向工業4.0與智慧製造的趨勢中, 機器人 Robotics 是自動化產業最重要的元素之一,然而,唯機械手臂本體能做到的應用是有限的,此時發展高度整合性能與各軟硬體周邊來達更廣域的應用,會因應市場的需求而催生。
在此展示 EPSON Robot 選配功能 RC+ API 7.0 ( Application Programming Interface ),簡稱 函示庫,簡單來說,它就像是可以讓你用的一個函式庫。呼叫你想要使用的函式,並給予相對應的參數,函式便回傳給你結果。
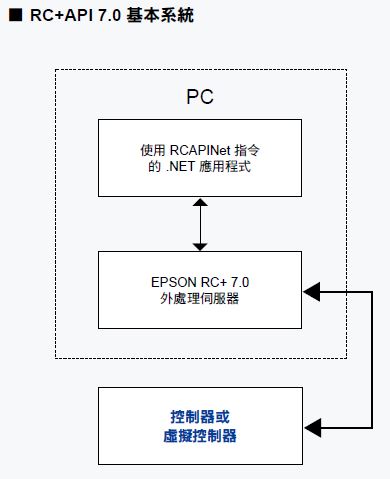
於熟悉的 Windows® 作業系統環境中編程並執行機械手臂應用程式。
機械手臂可透過 Visual (Basic、 C++、C#)、LabVIEW 與其他第三方程式設計語言控制,可擷取機械手臂狀態與變數值。在此展示程式語言整合性:
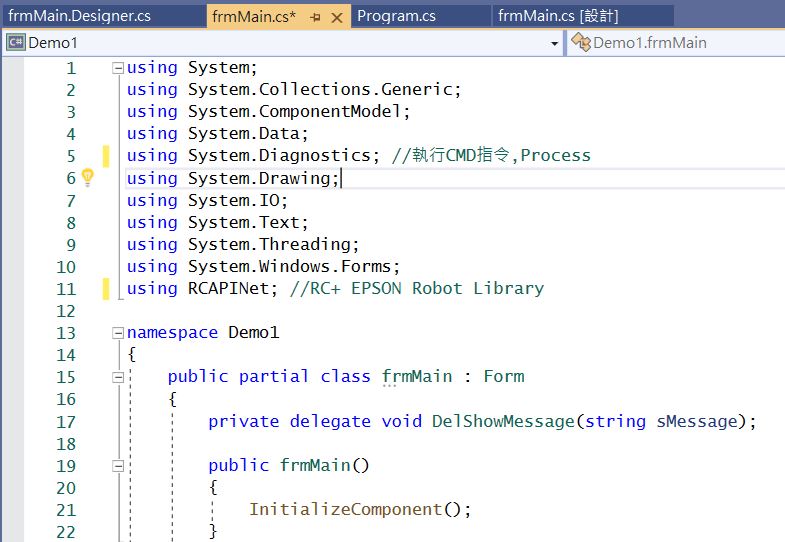
1. microsoft visual studio 2019 .NET C# 主開發
===================
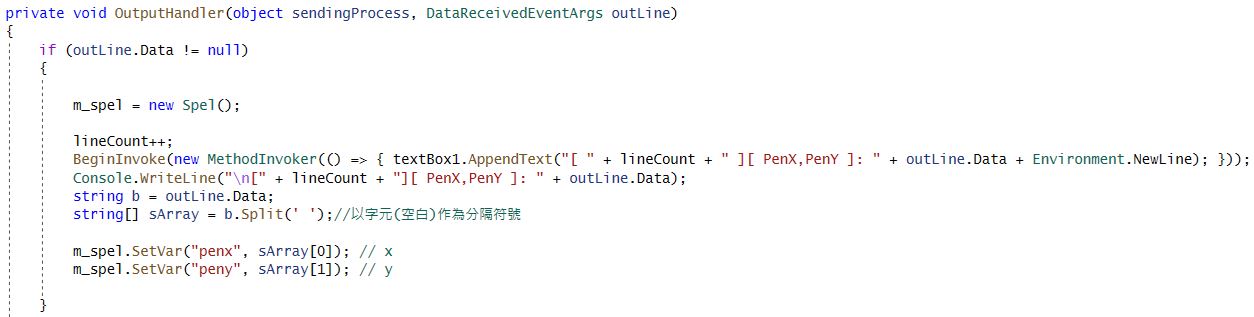
Using System.Diagnostics ; //執行外部程式, 透過 Process 類別
Using RCAPINet; // EPSON RC+ API 函示庫
===================
====================
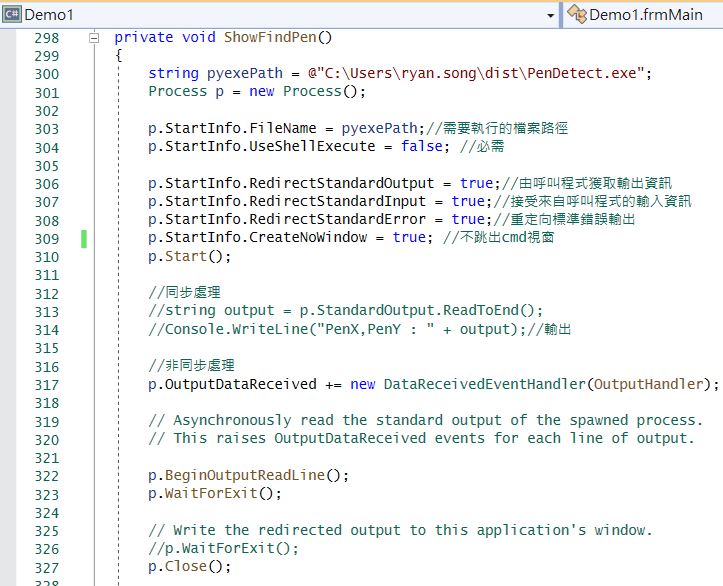
執行 p.StartInfo.FileName = pyexePath 外部檔案。
#前提: 需將 Python 檔案透過 PyIstalller 進行打包 exe 便可執行!
====================
====================
在此展示 EPSON Robot 選配功能 RC+ API 7.0 ( Application Programming Interface ),簡稱 函示庫,簡單來說,它就像是可以讓你用的一個函式庫。呼叫你想要使用的函式,並給予相對應的參數,函式便回傳給你結果。
於熟悉的 Windows® 作業系統環境中編程並執行機械手臂應用程式。
機械手臂可透過 Visual (Basic、 C++、C#)、LabVIEW 與其他第三方程式設計語言控制,可擷取機械手臂狀態與變數值。在此展示程式語言整合性:
1. microsoft visual studio 2019 .NET C# 主開發
===================
Using System.Diagnostics ; //執行外部程式, 透過 Process 類別
Using RCAPINet; // EPSON RC+ API 函示庫
===================
====================
執行 p.StartInfo.FileName = pyexePath 外部檔案。
#前提: 需將 Python 檔案透過 PyIstalller 進行打包 exe 便可執行!
====================
====================
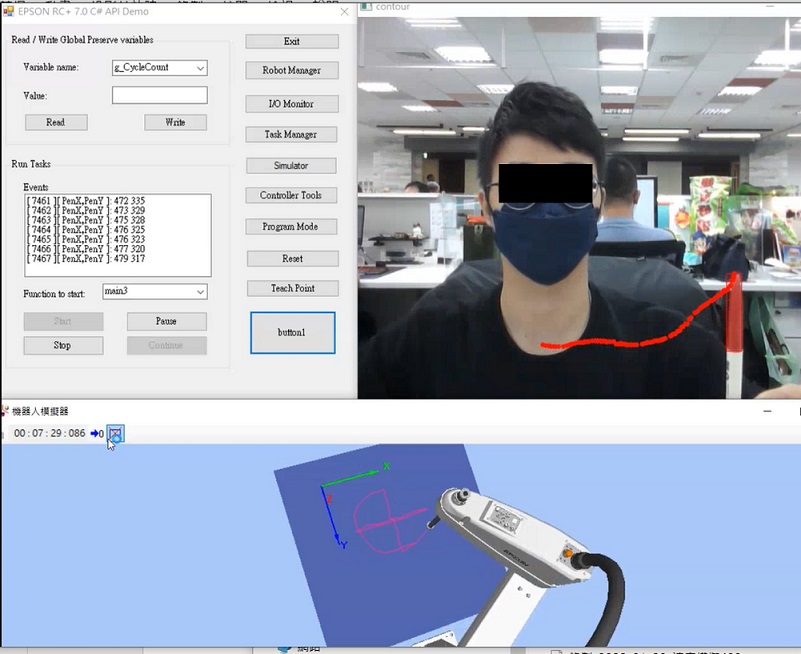
Pen X, Pen Y 為Virtual Pen 於cam 辨識得到FOV中之座標數值, 將變數值傳輸給 Robot 為移動點位。
====================
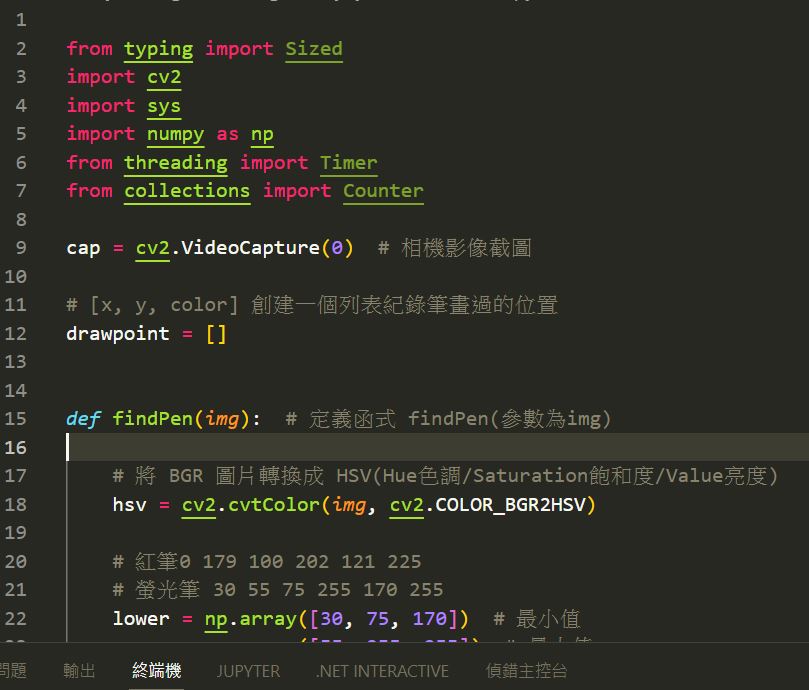
2. Python 3.7 + OpenCV 編譯環境 visual studio code
impot cv2
import numpy as np
程式碼內容請詳細參考 (註 1)
在此使用筆記型電腦內建之攝相機Camera,辨識螢光筆尖特徵並劃出筆跡經過路徑產生"虛擬筆"軌跡之實例。
====================
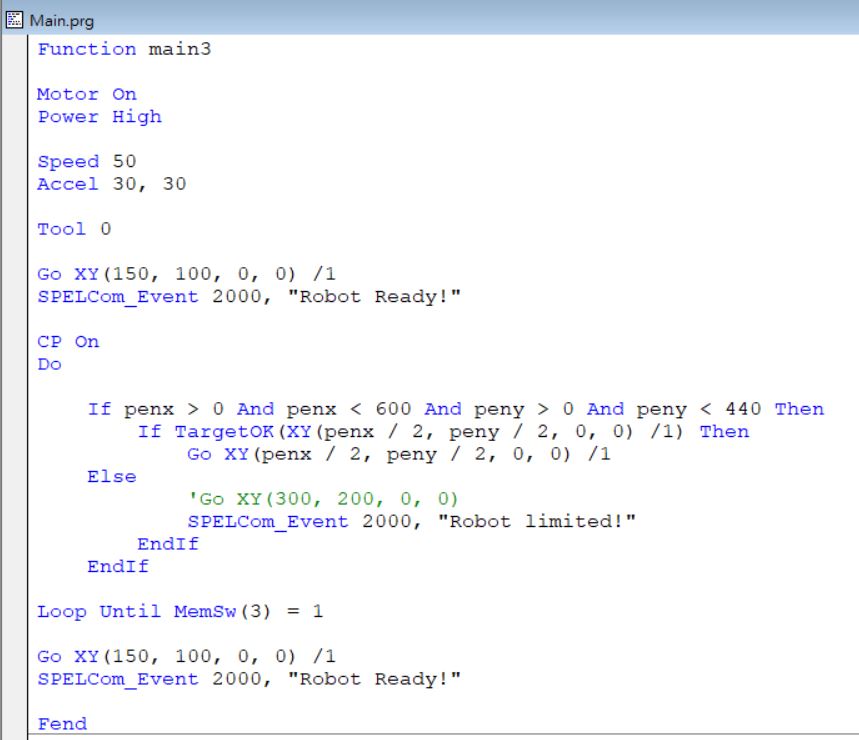
3. EPSON RC+ 軟體編程。

===================
接收來自 C# SetVar penx, peny 變數, RC+ 確認 xyz 座標 Robot 是否符合可移動範圍中, 確認相機辨識座標系與手臂座標系相同。
===================
透過以上步驟我們整合三方軟體與電腦視覺函示庫進行開發"虛擬筆" ( Virtual Pen ) 與 SCARA Robot 機械手臂動作展示。