

1. 方案特色
當工廠已導入門檻較低的手臂自動化設備後,就會想要規劃將較難的組裝動作透過機械手臂處理來邁向高度自動化產線,而組裝動作最難的是線的組裝,因為線會扭曲且受力會變形,此時則可以評估整合EPSON力覺感測器來進行此高難度的自動化。
2. 自動化方案介紹
a. 力覺感測介紹:
力覺感測器就像是賦予機械手臂觸覺的感受,當機械手臂夾持物有受力的時候,會回饋力道給機械手臂,就會知道已經有觸碰到物體了,而透過這個回饋力道的大小與方向來做出下一個相對應的動作。
b. 柔性組裝產品示意:
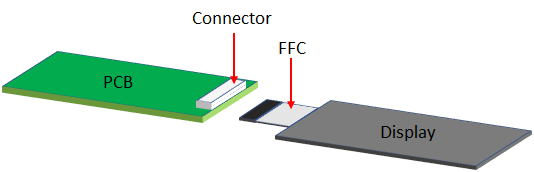
如下圖,此案例為Display與PCB做組裝,故要將FFC插入Connector中,而標準做法是需要將FFC的位置透過工業相機取像,夾取後再次用相機進行二次確認,再透過力覺感測透過探測、跟隨、加壓等動作慢慢送入Connector中;本次案例則是為了加速生產節拍,將產品都先做好定位,只透過力量加壓做出組裝動作。
當工廠已導入門檻較低的手臂自動化設備後,就會想要規劃將較難的組裝動作透過機械手臂處理來邁向高度自動化產線,而組裝動作最難的是線的組裝,因為線會扭曲且受力會變形,此時則可以評估整合EPSON力覺感測器來進行此高難度的自動化。
2. 自動化方案介紹
a. 力覺感測介紹:
力覺感測器就像是賦予機械手臂觸覺的感受,當機械手臂夾持物有受力的時候,會回饋力道給機械手臂,就會知道已經有觸碰到物體了,而透過這個回饋力道的大小與方向來做出下一個相對應的動作。
b. 柔性組裝產品示意:
如下圖,此案例為Display與PCB做組裝,故要將FFC插入Connector中,而標準做法是需要將FFC的位置透過工業相機取像,夾取後再次用相機進行二次確認,再透過力覺感測透過探測、跟隨、加壓等動作慢慢送入Connector中;本次案例則是為了加速生產節拍,將產品都先做好定位,只透過力量加壓做出組裝動作。
c. 動作流程說明:
動作說明 |
示意圖 |
| 先將Display吸取到PCB的旁邊 |  |
| FFC到達Connector前端後,使用力覺指令慢慢推入 |  |
| 因FFC碰到Connector底部後會感知反向力,推進就會停止 |  |
d. FFC柔性組裝調適要點:
| 常見問題 | 示意圖 | 解決方式 |
| FFC來料彎曲幅度不一 |  |
治具設計需要能靠位 |
| FFC插入無法到底 |  |
力覺施力參數須加大 |
| FFC插入後稍微變形 |  |
減少施力或是速度調降 |
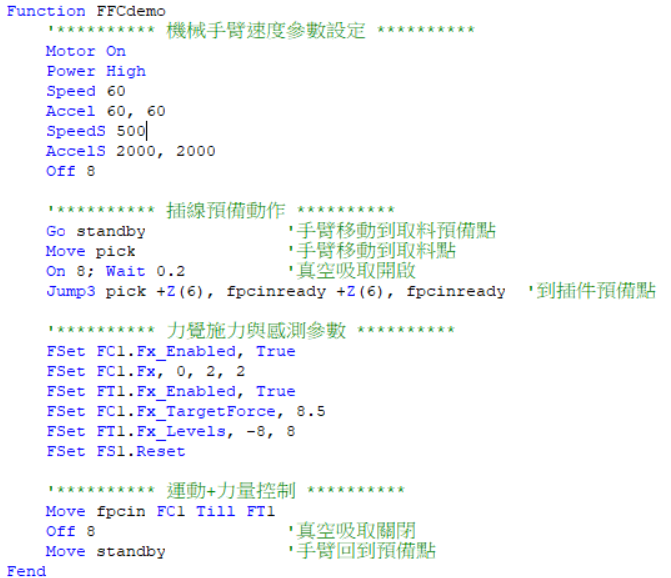
3. 簡易程式範例
評論