

1 手動調校
1.1 概述
賽普拉斯的SmartSense 技術允許器件進行自我校準,以獲得最佳性能,並自動完成整個調校過程。這種技術可滿足大多數設計的要求,但在SmartSense 不能自動調校或擁有特定的SNR或電源要求的情況下,您可以修改各個CapSense參數以滿足系統要求。通過手動調校可以實現該操作。
手動調校(與SmartSense 自動調校相反)的部分優點包括:
♦ 嚴格控制參數設置:SmartSense 會自動設置所有參數。但是在您需要嚴格控制各參數中,也有意外情況發生。例如,如果您需要嚴格控制PSoC 4 掃描一組傳感器所需的時間或者嚴格控制每個傳感器的感應時鐘頻率(以降低各系統中的EMI 值),請進行手動調校。
♦ 支持更高的寄生電容: 對於0.2 pF 的手指電容, SmartSense 支持高達45 pF 的寄生電容;對於0.1 pF 的手指電容,支持高達35 pF 的寄生電容。如果寄生電容量大於SmartSense 所支持的最大值,您需要進行手動調校。
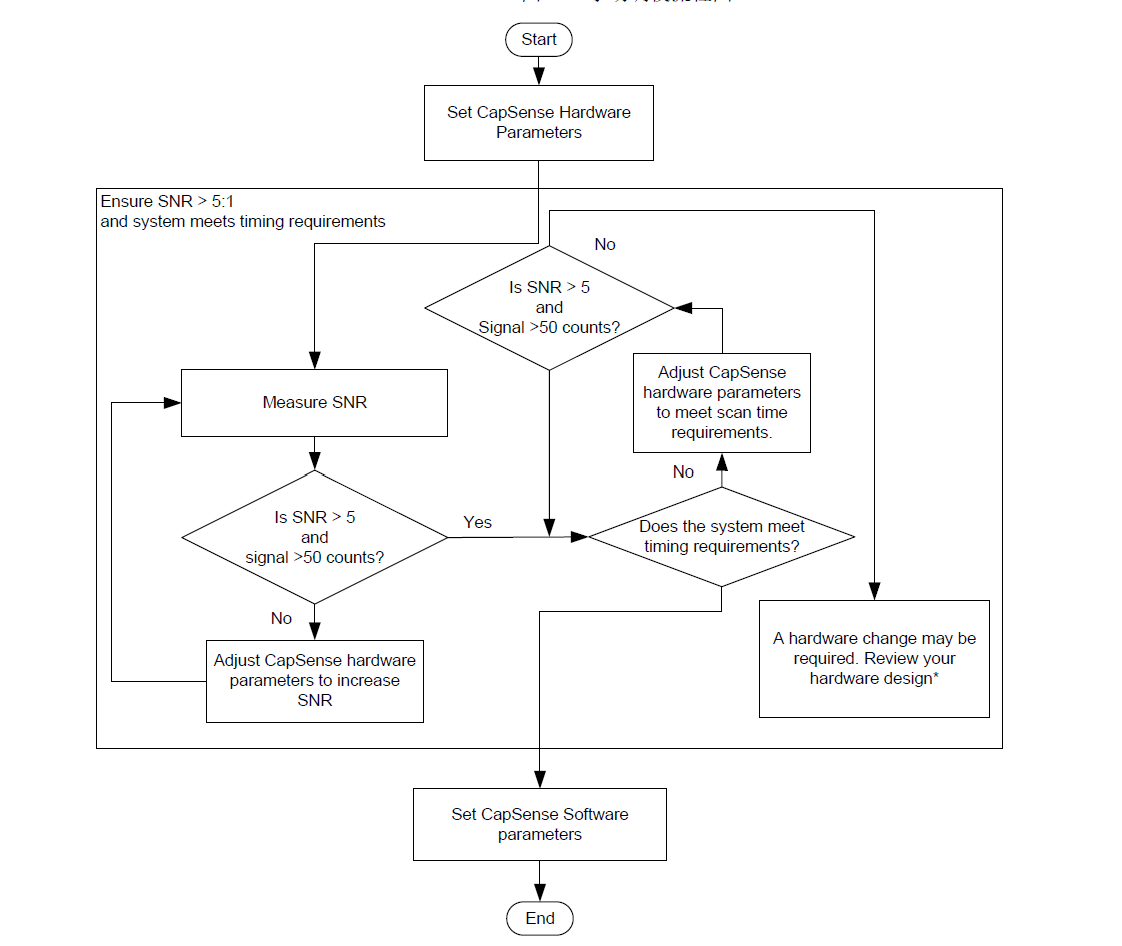
手動調校過程可總結為以下三個步驟,如圖1-1 所示。
1. 設置CapSense 組件硬體參數的初始值。
2. 調校CapSense 組件硬體參數,以確保信噪比大於5:1(信號不小於50 各計數),並且系統滿足各時序要求。
3. 設置CapSense 組件硬體參數的最佳值(閾值參數)
1.2 CSD感應方法
本節說明了使用CSD感應方法進行手動調校的基礎知識。另外,它還介紹了影響手動調校過程的各個硬體和軟體參數。最終,它為您提供了手動調校的三個示例,包括按鍵、滑條和接近感應的widget。
1.2.1 基礎知識
1.2.1.1 轉換增益和CapSense信號
轉換增益會影響系統可觀查到的信號狀態。增益越大,信號越高,從而可獲得的信噪比也越大。請注意,增大增益可能同時增強信號和噪聲。但若有需要,您可以使用固件濾波器來降低噪聲。有關可用固件濾波器的詳細信息,請參考表5-2。
1.2.1.1.1 單IDAC模式下的轉換增益
在單IDAC模式下,原始計數值與傳感器電容值成正比。
公式1-1. 原始計數與傳感器電容的關係
raw count = GC CS
其中,CS 為傳感器電容。如果傳感器上不存在手指觸摸,CS = CP。傳感器上存在手指觸摸時,CS = (CP + CF)。GC是CapSense CSD電容值轉換成數字值的增益。根據公式3-6和公式5-1,使用所推薦的IDAC源電流模式的轉換增益的近似值如下:
公式1-2. 數字轉換器增益的電容
Gc= (2N−1) VREF FSWIMOD
其中:
VREF是比較器的參考電壓。所有PSoC 4系列器件(PSoC 4 S系列除外)的VREF值被固定為1.2 V。對於PSoC 4100S Plus、PSoC 4100PS系列以及PSoC 61系列,VREF值的範圍為0.6 V到VDDA – 0.6 V。FSW是感應時鐘頻率,IMOD 是調製IDAC電流。
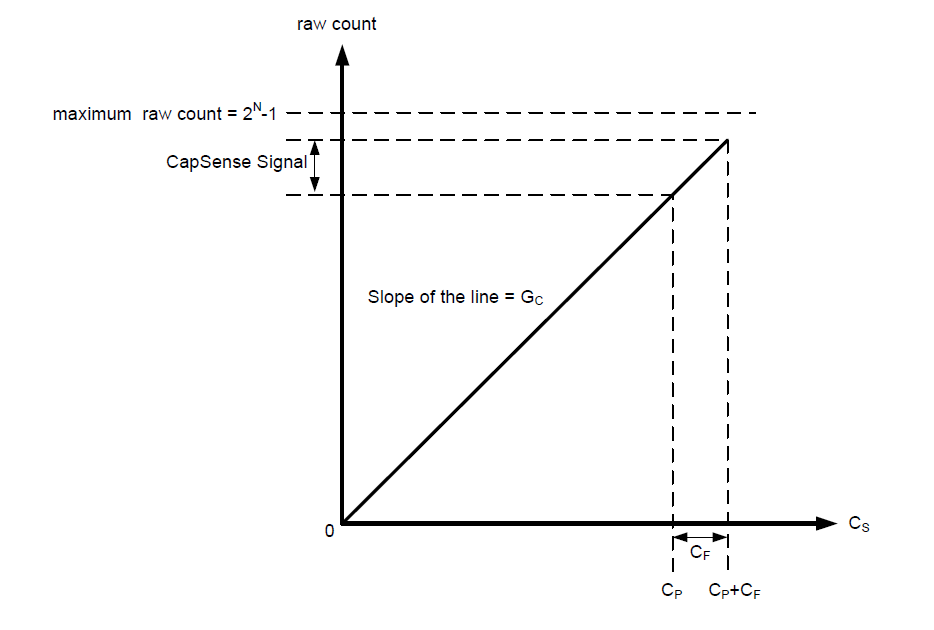
轉換增益的各可調校參數分別為VREF(僅針對PSoC 4 S系列、PSoC 4100S Plus、PSoC 4100PS和PSoC 6MCU系列)、FSW、IMOD和N。圖1-2顯示的是原始計數和傳感器電容的關係圖。
注意:CapSense組件會根據VDDA電壓自動選擇VREF。
圖1-2. 原始計數與傳感器電容
當傳感器上有手指觸摸時,原始計數將發生變化,這種變化被稱為CapSense 信號。圖1-3 顯示了信號變化值和轉換增益的關係。
圖1-3. 不同轉換增益中的信號值
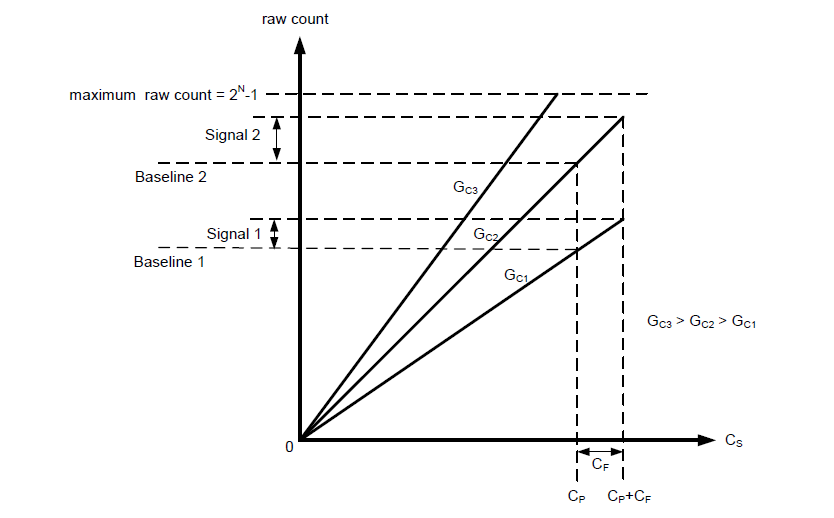
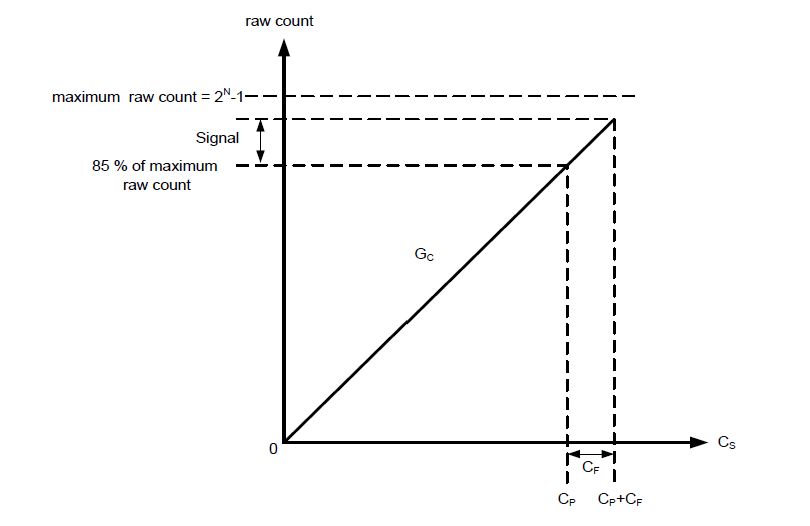
圖1-3顯示的是與三個轉換增益值相對應的三條關係線:GC3、GC2 和GC1。轉換增益增大會使信號值增大。但增大轉換增益值也會使與CP(即基線)相對應的原始計數值越來越靠近原始計數的最大值(2N-1)。增益值過大,原始計數會飽和,如GC3 所示。因此,為避免原始計數飽和,您應調整轉換增益的值,以得到良好的信號值。對CSD 參數進行調校。當傳感器上沒有發生手指觸摸時(即CS = CP)原始計數 = (2N-1)的85%,如圖5-12 所示。這樣能夠確保在增益值最大並且環境發生變化時,可以儘可能增大原始計數值,並且手指觸摸位置上不會發生飽和。
圖1-4. 建議的調校方式
1.2.1.1.2 雙IDAC 模式下的轉換增益
從公式1-2 和公式3-8,可推出雙IDAC 模式下的原始計數計算公式:
公式1-3. 雙IDAC 模式的原始計數
raw count = GC CS − (2N − 1)(ICOMP/IMOD)
在雙IDAC模式下,補償IDAC始終處於打開狀態。如果ICOMP是補償IDAC電流,則通過下面的公式可計算出IDAC源電流模式下的原始計數值:
公式3-8. 雙IDAC源電流模式中的原始計數
raw count=(2N−1)( VREF*FSW/IMOD) CS−(2N−1) (ICOMP/IMOD)
其中:
ICOMP 是補充IDAC 電流,GC 是通過公式1-2 計算出的。
在單IDAC 模式和雙IDAC 模式對CSD 參數進行調校時,如果傳感器上沒有發生手指觸摸(即CS = CP)時,原始計數= (2N-1)的85%如圖5-13 所示,從而確保高轉換增值,避免出現扁平點以及避免因環境變化造成的原始計數飽和情況。
圖1-5. 雙IDAC 模式下的建議調校方式
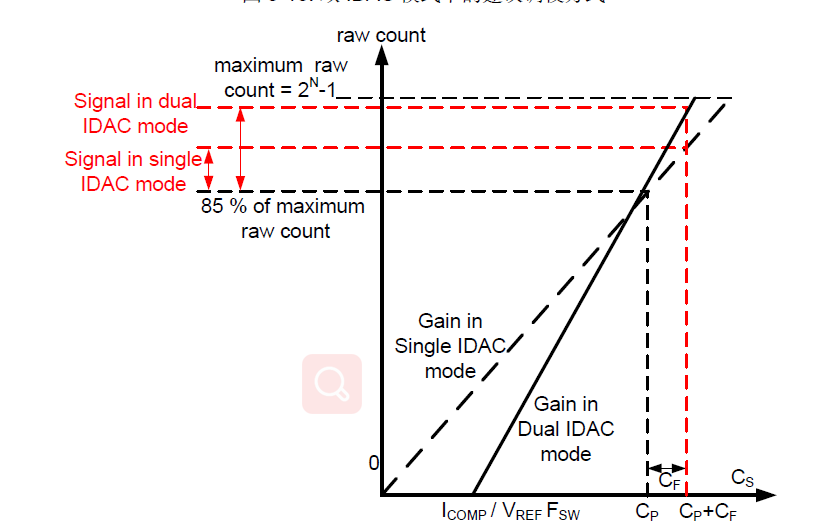
如圖1-5 所示, 在單IDAC 模式下85%的要求被限制為固定增值,而在雙IDAC 模式下,通過將CS 軸攔截向右移動(增加ICOMP)以及相應降低調製器IDAC(IMOD)可以增大增值。CS = CP 時仍獲取的原始計數為(2N-1)的85%。
這樣使用雙IDAC 模式會使原始計數與CP 值的關係圖發生以下變化:
a. 使用補償IDAC 會引起CS 軸上的一個非零攔截,可使用下面公式計算該值:
公式1-4. 關於ICOMP 的Cs Axis Intercept
?s axis intercept = ICOMP/(VREF*FSW)
b. 由於雙IDAC 模式下的IMOD 值為單IDAC 模式下IMOD 值的一半(所有其他的參數都相同),因此,從公式1-2 中可看出:雙IDAC 模式下的增益GC 是單IDAC 模式下增益值的兩倍。因此,在給定的解析度N 上,雙IDAC 模式的信號比單IDAC 模式的信號大一倍。
在進行手動調校傳感器過程中,請注意使用公式1-2、公式1-3 和以下注意事項:
1. 增益越高,靈敏度則越大,並且整個系統的性能也越好。但設置增益時要注意避免原始計數飽和的情況,如圖1-3 中增益GC3 的關係線所示。建議您設置增益以讓對應於CP 的原始計數為最大原始計數值的85%(對於單IDAC模式和雙IDAC 模式都是這樣)。設置感應時鐘頻率(FSW)時請務必小心。頻率越高,增益也越大,但該頻率要足夠低,以完成傳感器充電和放電過程,如圖3-6 傳感器電容的電壓所示。
2. 勾選補償IDAC 時可增大增益值。如果按照上述部分設置補償IDAC,可使增益值增加一倍。因此,如果沒將補償IDAC 用於通用應用,建議您始終使能該參數。
3. 調製器IDAC 電流越低,獲得的增益越大。調整您的IDAC 以得到最大增益,但需要保證相應於CP 的原始計數在環境條件發生變化(如溫度改變)時可以儘量調整,如圖1-4 和圖1-5 所示。
4. 通過增大解析度,可以增大增益值。如果將解析度遞增一位數,系統的增益會增加一倍,但掃描時間也隨著增加一倍,如公式3-4 所示。因此,建議適當調整解析度,從而使掃描時間和增益值得到平衡。
公式3-4. 傳感器掃描時間
?ensor scan time= Hardware scan time+Sensor Initialization time
1.1 概述
賽普拉斯的SmartSense 技術允許器件進行自我校準,以獲得最佳性能,並自動完成整個調校過程。這種技術可滿足大多數設計的要求,但在SmartSense 不能自動調校或擁有特定的SNR或電源要求的情況下,您可以修改各個CapSense參數以滿足系統要求。通過手動調校可以實現該操作。
手動調校(與SmartSense 自動調校相反)的部分優點包括:
♦ 嚴格控制參數設置:SmartSense 會自動設置所有參數。但是在您需要嚴格控制各參數中,也有意外情況發生。例如,如果您需要嚴格控制PSoC 4 掃描一組傳感器所需的時間或者嚴格控制每個傳感器的感應時鐘頻率(以降低各系統中的EMI 值),請進行手動調校。
♦ 支持更高的寄生電容: 對於0.2 pF 的手指電容, SmartSense 支持高達45 pF 的寄生電容;對於0.1 pF 的手指電容,支持高達35 pF 的寄生電容。如果寄生電容量大於SmartSense 所支持的最大值,您需要進行手動調校。
手動調校過程可總結為以下三個步驟,如圖1-1 所示。
1. 設置CapSense 組件硬體參數的初始值。
2. 調校CapSense 組件硬體參數,以確保信噪比大於5:1(信號不小於50 各計數),並且系統滿足各時序要求。
3. 設置CapSense 組件硬體參數的最佳值(閾值參數)
圖1-1 手動調校流程圖
1.2 CSD感應方法
本節說明了使用CSD感應方法進行手動調校的基礎知識。另外,它還介紹了影響手動調校過程的各個硬體和軟體參數。最終,它為您提供了手動調校的三個示例,包括按鍵、滑條和接近感應的widget。
1.2.1 基礎知識
1.2.1.1 轉換增益和CapSense信號
轉換增益會影響系統可觀查到的信號狀態。增益越大,信號越高,從而可獲得的信噪比也越大。請注意,增大增益可能同時增強信號和噪聲。但若有需要,您可以使用固件濾波器來降低噪聲。有關可用固件濾波器的詳細信息,請參考表5-2。
1.2.1.1.1 單IDAC模式下的轉換增益
在單IDAC模式下,原始計數值與傳感器電容值成正比。
公式1-1. 原始計數與傳感器電容的關係
raw count = GC CS
其中,CS 為傳感器電容。如果傳感器上不存在手指觸摸,CS = CP。傳感器上存在手指觸摸時,CS = (CP + CF)。GC是CapSense CSD電容值轉換成數字值的增益。根據公式3-6和公式5-1,使用所推薦的IDAC源電流模式的轉換增益的近似值如下:
公式1-2. 數字轉換器增益的電容
Gc= (2N−1) VREF FSWIMOD
其中:
VREF是比較器的參考電壓。所有PSoC 4系列器件(PSoC 4 S系列除外)的VREF值被固定為1.2 V。對於PSoC 4100S Plus、PSoC 4100PS系列以及PSoC 61系列,VREF值的範圍為0.6 V到VDDA – 0.6 V。FSW是感應時鐘頻率,IMOD 是調製IDAC電流。
轉換增益的各可調校參數分別為VREF(僅針對PSoC 4 S系列、PSoC 4100S Plus、PSoC 4100PS和PSoC 6MCU系列)、FSW、IMOD和N。圖1-2顯示的是原始計數和傳感器電容的關係圖。
注意:CapSense組件會根據VDDA電壓自動選擇VREF。
圖1-2. 原始計數與傳感器電容
當傳感器上有手指觸摸時,原始計數將發生變化,這種變化被稱為CapSense 信號。圖1-3 顯示了信號變化值和轉換增益的關係。
圖1-3. 不同轉換增益中的信號值
圖1-3顯示的是與三個轉換增益值相對應的三條關係線:GC3、GC2 和GC1。轉換增益增大會使信號值增大。但增大轉換增益值也會使與CP(即基線)相對應的原始計數值越來越靠近原始計數的最大值(2N-1)。增益值過大,原始計數會飽和,如GC3 所示。因此,為避免原始計數飽和,您應調整轉換增益的值,以得到良好的信號值。對CSD 參數進行調校。當傳感器上沒有發生手指觸摸時(即CS = CP)原始計數 = (2N-1)的85%,如圖5-12 所示。這樣能夠確保在增益值最大並且環境發生變化時,可以儘可能增大原始計數值,並且手指觸摸位置上不會發生飽和。
圖1-4. 建議的調校方式
1.2.1.1.2 雙IDAC 模式下的轉換增益
從公式1-2 和公式3-8,可推出雙IDAC 模式下的原始計數計算公式:
公式1-3. 雙IDAC 模式的原始計數
raw count = GC CS − (2N − 1)(ICOMP/IMOD)
在雙IDAC模式下,補償IDAC始終處於打開狀態。如果ICOMP是補償IDAC電流,則通過下面的公式可計算出IDAC源電流模式下的原始計數值:
公式3-8. 雙IDAC源電流模式中的原始計數
raw count=(2N−1)( VREF*FSW/IMOD) CS−(2N−1) (ICOMP/IMOD)
其中:
ICOMP 是補充IDAC 電流,GC 是通過公式1-2 計算出的。
在單IDAC 模式和雙IDAC 模式對CSD 參數進行調校時,如果傳感器上沒有發生手指觸摸(即CS = CP)時,原始計數= (2N-1)的85%如圖5-13 所示,從而確保高轉換增值,避免出現扁平點以及避免因環境變化造成的原始計數飽和情況。
圖1-5. 雙IDAC 模式下的建議調校方式
如圖1-5 所示, 在單IDAC 模式下85%的要求被限制為固定增值,而在雙IDAC 模式下,通過將CS 軸攔截向右移動(增加ICOMP)以及相應降低調製器IDAC(IMOD)可以增大增值。CS = CP 時仍獲取的原始計數為(2N-1)的85%。
這樣使用雙IDAC 模式會使原始計數與CP 值的關係圖發生以下變化:
a. 使用補償IDAC 會引起CS 軸上的一個非零攔截,可使用下面公式計算該值:
公式1-4. 關於ICOMP 的Cs Axis Intercept
?s axis intercept = ICOMP/(VREF*FSW)
b. 由於雙IDAC 模式下的IMOD 值為單IDAC 模式下IMOD 值的一半(所有其他的參數都相同),因此,從公式1-2 中可看出:雙IDAC 模式下的增益GC 是單IDAC 模式下增益值的兩倍。因此,在給定的解析度N 上,雙IDAC 模式的信號比單IDAC 模式的信號大一倍。
在進行手動調校傳感器過程中,請注意使用公式1-2、公式1-3 和以下注意事項:
1. 增益越高,靈敏度則越大,並且整個系統的性能也越好。但設置增益時要注意避免原始計數飽和的情況,如圖1-3 中增益GC3 的關係線所示。建議您設置增益以讓對應於CP 的原始計數為最大原始計數值的85%(對於單IDAC模式和雙IDAC 模式都是這樣)。設置感應時鐘頻率(FSW)時請務必小心。頻率越高,增益也越大,但該頻率要足夠低,以完成傳感器充電和放電過程,如圖3-6 傳感器電容的電壓所示。
2. 勾選補償IDAC 時可增大增益值。如果按照上述部分設置補償IDAC,可使增益值增加一倍。因此,如果沒將補償IDAC 用於通用應用,建議您始終使能該參數。
3. 調製器IDAC 電流越低,獲得的增益越大。調整您的IDAC 以得到最大增益,但需要保證相應於CP 的原始計數在環境條件發生變化(如溫度改變)時可以儘量調整,如圖1-4 和圖1-5 所示。
4. 通過增大解析度,可以增大增益值。如果將解析度遞增一位數,系統的增益會增加一倍,但掃描時間也隨著增加一倍,如公式3-4 所示。因此,建議適當調整解析度,從而使掃描時間和增益值得到平衡。
公式3-4. 傳感器掃描時間
?ensor scan time= Hardware scan time+Sensor Initialization time
評論