

- 簡介
隨者科技的進步,各個電子廠對自動化的精確度的要求也逐漸提高,而為了提高精確度, 自動化使用感測元件也越來越多。為了避免人眼被環境中各種產品或設備感測時發射的光干擾,所以使用人眼無法察覺的紅外線(Infrared; IR)產品做為感測器。以下將會介紹如何使用紅外線 發光二極體(IR Light-emitting diode; IR LED)及光電晶體(Photo Transistor; PT)去偵測旋轉方 向應用。圖一為基本的 IR LED 搭配 PT 的應用電路。
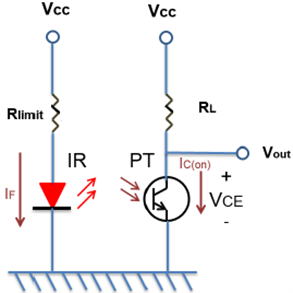
圖 1. IR LED 與 PT 基本應用電路
判斷說明:
- 無輻照度時,PT 截止,Vout 輸出為高電位
- 輻照度高時,PT 飽和,Vout 輸出為低電位
2. 對射式 ITR 旋轉方向偵測
一般旋轉方向的電路會跟 IR LED 與 PT 基本應用電路不一樣,會多出一個 PT(理由會在下 面解釋),下圖 2PT 的基本電路圖 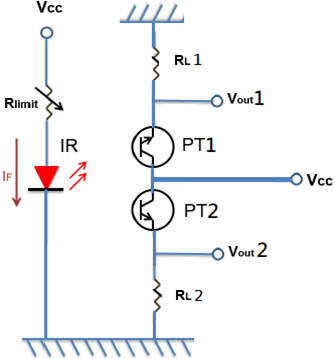
圖 2. 2PT 基本電路圖
2PT Vout 判斷方式:
- 無輻照度時,PT 截止,Vout 輸出為低電位
- 輻照度高時,PT 飽和,Vout 輸出為高電位
增加一個 PT 是為了可以多一個訊號去判斷目前旋轉方向為順時針或是逆時針,如何判斷 現在是順時針或是逆時針,可以看 PT1 或 PT2 誰先發出訊號,當旋轉編碼器往順時針方向旋轉 時,狹縫會第一時間先遮擋到 PT1,而讓 PT1 output 產生低電位訊號,然後擋住 PT2,讓 PT2 output 產生低電位訊號。而逆時針偵測方式剛好與順時針方向相反。下圖 3 跟圖 4 為順時針 和逆時針旋轉方向示意圖。
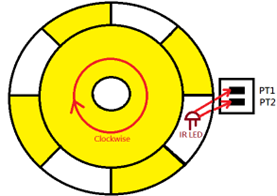
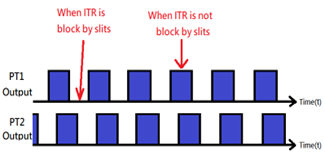
圖 3. 順時針方向
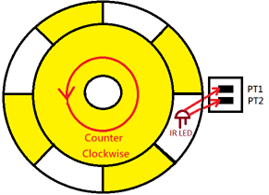
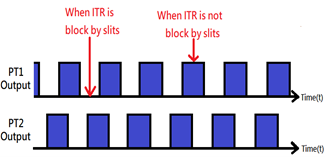
圖 4. 逆時針方向
另外須注意編碼輪的狹縫的長度需要大於 2 個 PT 的寬度,在旋轉時才可以從 2 個 PT output 輸出的先後順序判斷出旋轉方向。
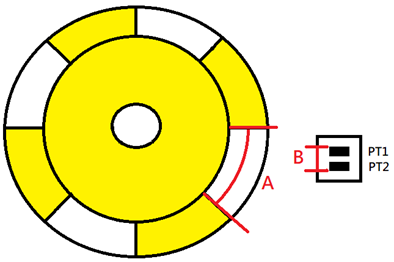
圖 5. A 的距離需要大於 B 的距離
- 實際操作
底下以 IR LED 與 2PT 實際操作,當編碼輪轉順時針方向旋轉時所產生如圖 6,而逆時針 方向旋轉時所產生如圖 7。這裡 Ch1 為 PT2 output,而 Ch2 為 PT1 output。
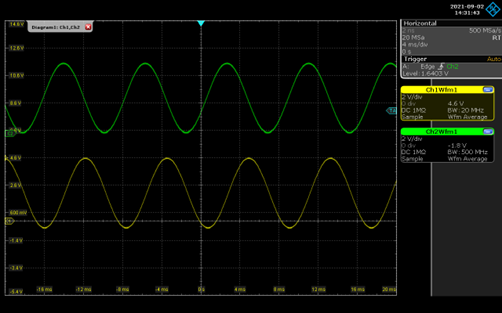
圖 6. 順時針方向旋轉
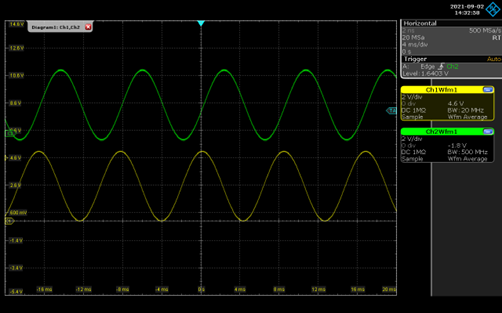
圖 7. 逆時針方向旋轉
如上圖所看到,當旋轉編碼輪時示波器會產生出正弦波,為了更容易分辨哪個 PT 先產生 波形,可以在輸出端後面加上非對稱史密特觸發器(Non-Symmetrical Schmitt Trigger),非對 稱史密特觸發器可以讓正弦波在大於或小於某一個電壓值時只會產生高準位或低準位的方波。 圖 8 為反向非對稱史密特觸發器,如何計算準位電壓,可以參考另一份應用手冊 Analog ALS Application Note。
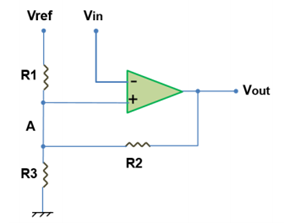
圖 8. 反向史密特觸發器
圖 8 的 Vref = 5V 和 R1=R2=R3=10kΩ,所以每當正弦波上升至約 3.33V 時,就可以觀 察到方波下拉至低準位,而正弦波下降至 1.66V 時,方波就會上升至高準位,如下圖 9 編碼
輪往順時針轉的波形,圖 10 為編碼輪往逆時針轉的波形。這裡 Ch1 為 PT2 output,而 Ch2 為 PT1 output。
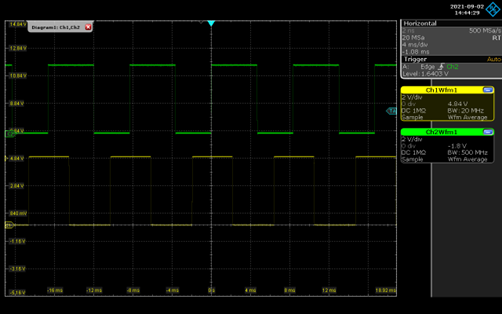
圖 9. 順時針方向旋轉
圖 10. 逆時針方向旋轉
另外可以利用數位化的方式來看目前編碼輪的旋轉方向,如表 1 顯示當編碼輪往順時針方 向轉時可以看到一開始為 00 再來是 01 再來是 11 最後為 10,當為編碼輪往逆時針方向轉時
可以看到一開始為 00 再來是 10 再來是 11 最後為 01。
順時針方向 : 00 -->01 --> 11 -->10
逆時針方向 : 00 -->10-->11--> 01
表 1. 旋轉方向數位化偵測方式
下圖 11 為順時針方向數位化顯示,而圖 12 為逆時針方向數位化顯示。
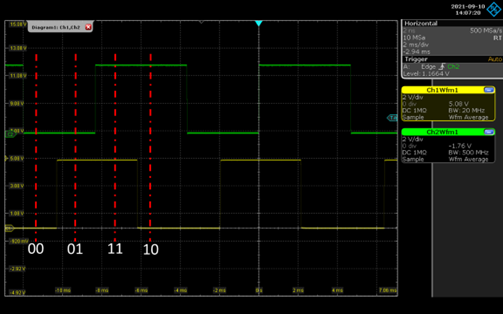
圖 11. 順時針方向旋轉
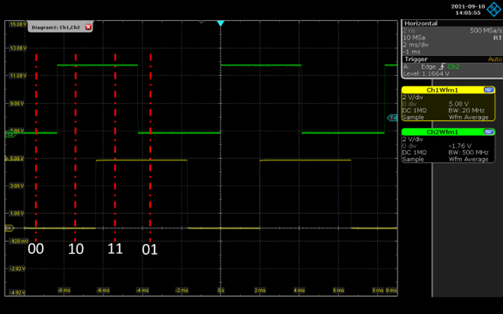
圖 12. 逆時針方向旋轉
評論