

- Conveyor Tracking 功能概述
- 傳送帶跟蹤是機器人透過視覺系統或感測器偵測經由固定或移動式傳送帶拾取工件的程序。
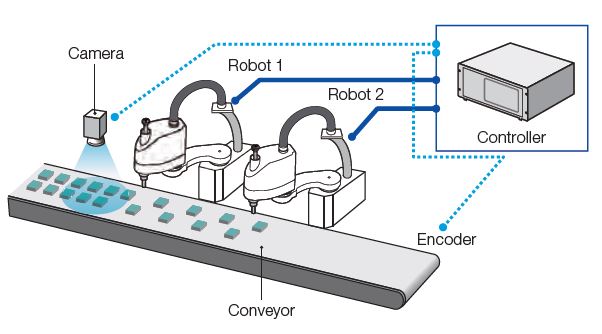
- 在輸送帶追蹤系統中,機器手臂能動態追隨流水線上的物體,並且不停歇的抓取物體。
- 擁有輸送帶追蹤功能的機器手臂能做以下的事情 :
- 任意角度擺放置產品之動作作業
- 輸送帶上的物體彼此傳遞作業
- 手臂夾具對齊物體抓取作業
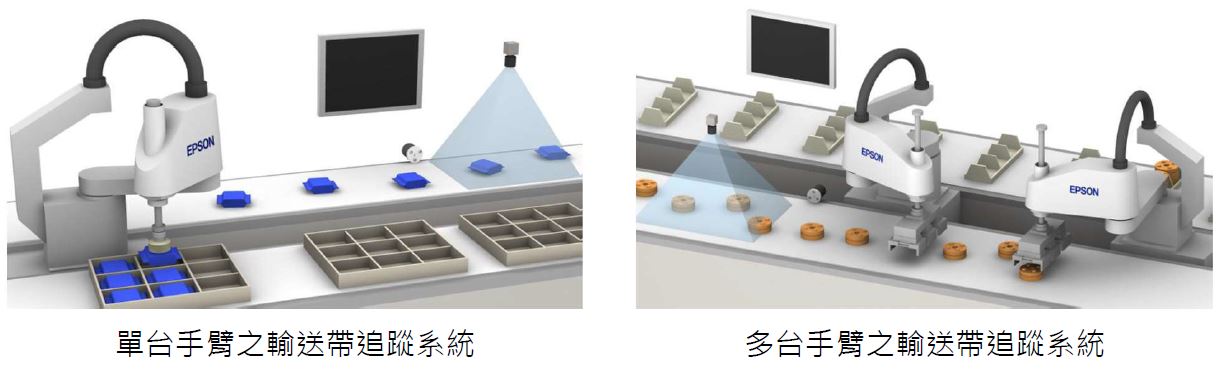
- EPSON Robot 軟體 RC+ 7.0 傳送帶跟蹤選配件同時支援跟蹤式及索引式傳送帶系統。
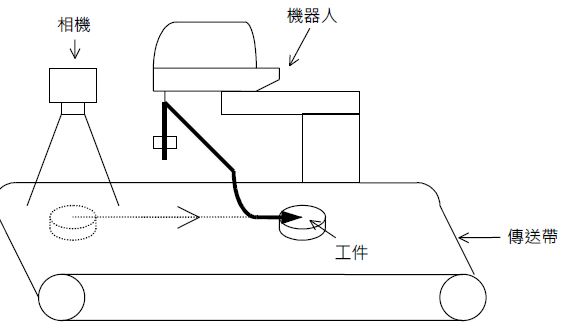
- 跟蹤式傳送帶系統(左圖)
傳送帶會持續移動。視覺系統或感測器系統會偵測傳送帶上的工件,機器人則在工件移動時進行拾取。在跟蹤期間,機器人於拾取工件時會隨著工件移動。
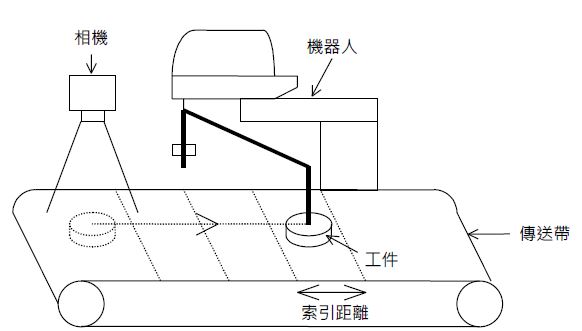
- 索引式傳送帶系統(右圖)
傳送帶會以指定距離移動並停止。視覺系統會偵測工件,再由機器人拾取各工件。偵測並拾取所有工件後,傳送帶會再次移動。
- EPSON Robot 傳送帶追蹤系統的優勢
RC+軟體擁有極高整合性 EPSON Vision 視覺系統+Conveyor function (外部軸卡系統)支援使用端多元配置需求如: 軟體或硬體觸發、多台機器人配置傳送帶等,
使用者可透過軟體的" 響導 Wizard "操作傳送帶、Encoder、視覺等校正作業,大幅減少開發所需的整合時程
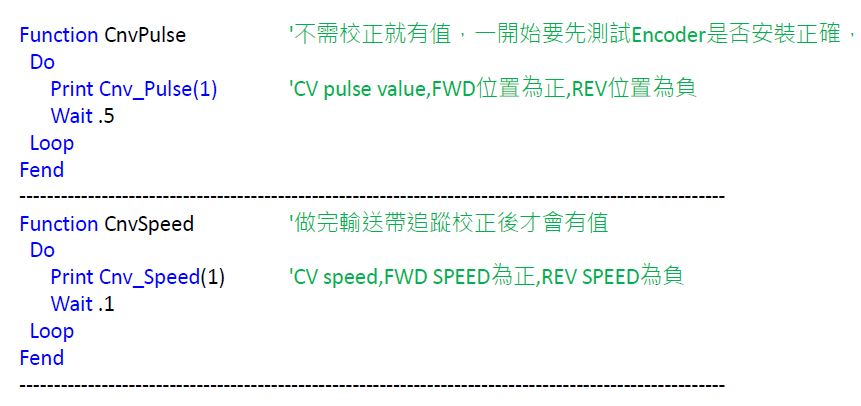
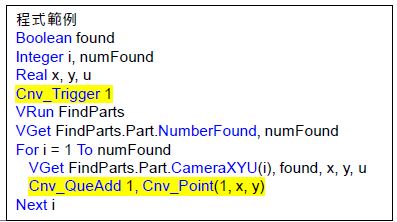
RC+內建程式指令模組化,傳送帶跟蹤命令皆以相同的前置字元作為開頭:「Cnv_」。
如下實際Coding 內容,測試 Encoder 安裝正確之範例:
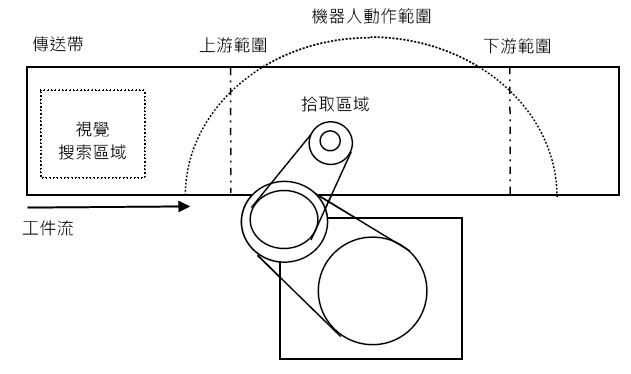
完成校準後,拾取區域將如下圖所示完成定義。請注意,上游範圍與下游範圍
的位置係依您在校準期間示教的位置而定。
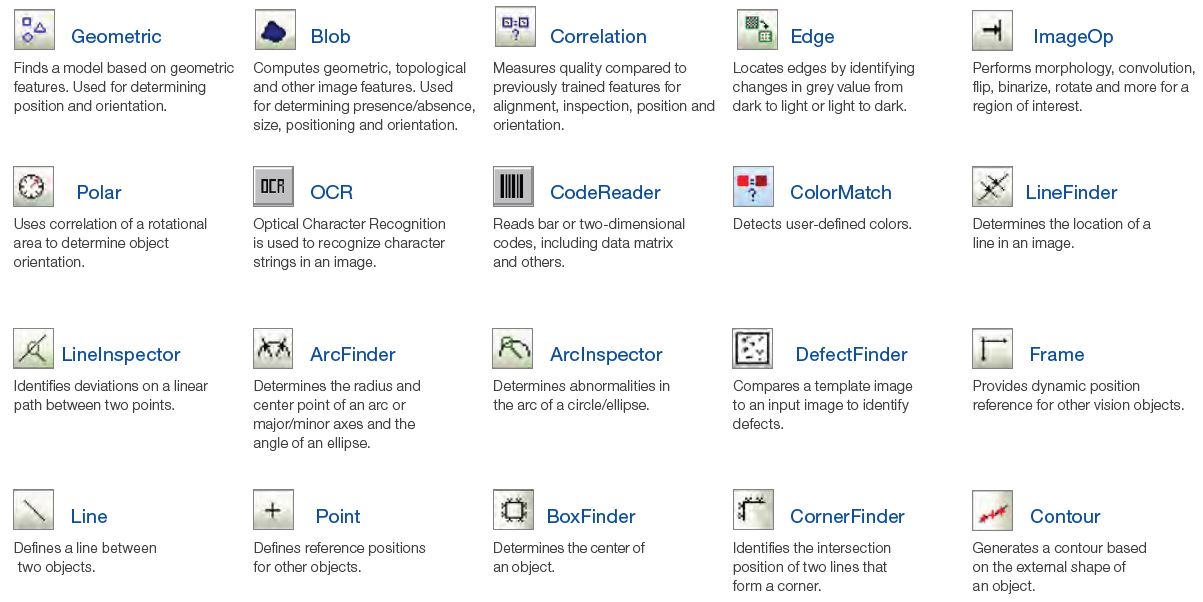
EPSON 視覺序列,可透過內建機器視覺辨識物件特徵,提取物件屬性定位、數量、外觀、輪廓、缺陷、CodeReader、OCR等視覺處裡,搭配傳送帶追蹤整合應用來滿足多樣性的需求
1. 視覺辨識
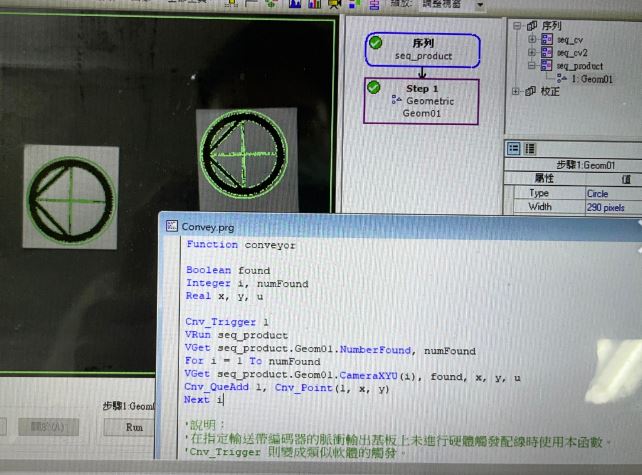
2. Sample coding (Cnv_Trigger)
3. 追蹤物件 ( Conveyor speed 350mm/sec )

參考資料.
1. https://www.epson.com.tw
2. EPSON Taiwan 機械手臂展示中心暨實驗室
3. EPSON Robotics_Specifications_2021_Catalog
4. EPSON 自動化解決方案 YT https://youtube.com/playlist?list=PLwVBJVUsEIFE22zYBnhN_YV5ScZYj6UCN
評論