

一、TCP/IP協定
Transmission Control Protocol / Internet Protocol
網際網路協議套組(英語:Internet Protocol Suite,縮寫為IPS),是一個網路通訊模型,以及一整個網路傳輸協定家族,為網際網路的基礎通訊架構。
它常被通稱為TCP/IP協定族(英語:TCP/IP Protocol Suite,或TCP/IP Protocols),簡稱TCP/IP。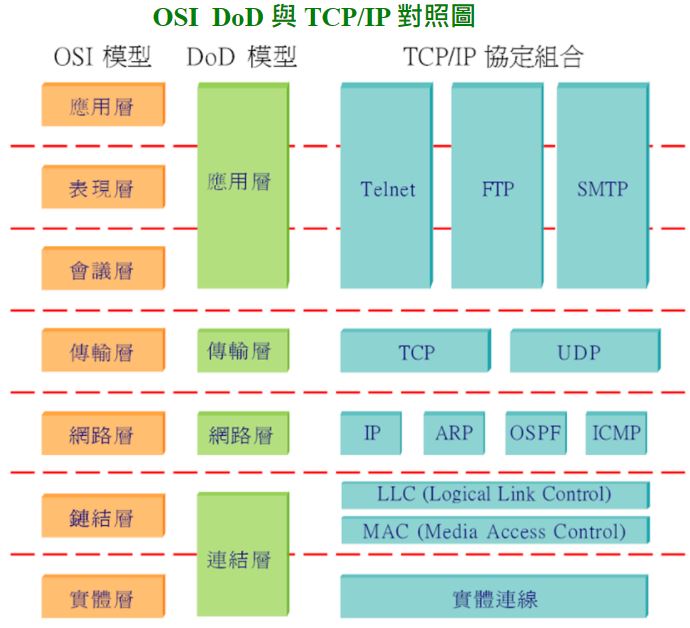
二、 EPSON Robot RC+ 遠程控制
<< Remote Ethernet 介紹 >>
Remote Ethernet 功能,主要使用乙太網路 無協議 控制 / 監控機器人。PC 和控制器之間使用TCP/IP 通信之前,您必須先配置網路。
2.1- Ethernet 硬體
機械手臂控制器包含具備一個RJ45 接頭的內建Ethernet 介面,可從控制器後面板介接。此介面支援10BaseT (10 Mbps)和10BaseTX (100 Mbps)。您的 PC 需要使用 10BaseT 10/100 介面卡,才能透過Ethernet 與控制器通信。
2.2- IP 地址與閘道
控制器具有固定IP 地址,您可從EPSON RC+ 7.0 進行配置。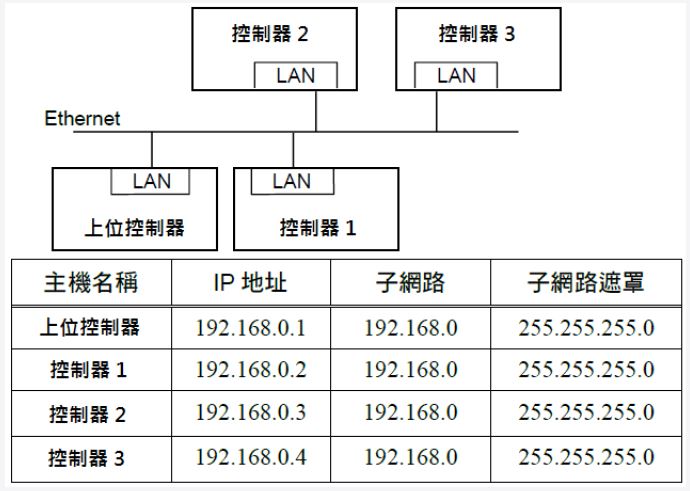
2.3- 測試 Windows TCP/IP 設置
使用命令視窗的ping 命令測試通信。
首先執行回送測試,檢查能否使用本地IP 地址來偵測您的地址:
C:\>ping 127.0.0.1
Pinging 127.0.0.1 with 32 bytes of data:
Reply from 127.0.0.1: bytes=32 time<10ms TTL=128
Reply from 127.0.0.1: bytes=32 time<10ms TTL=128
Reply from 127.0.0.1: bytes=32 time<10ms TTL=128
Reply from 127.0.0.1: bytes=32 time<10ms TTL=128
C:\>
偵測PC 的IP 地址:
C:\>ping 192.168.0.1
Pinging 192.168.0.1 with 32 bytes of data:
Reply from 192.168.0.1: bytes=32 time<10ms TTL=128
Reply from 192.168.0.1: bytes=32 time<10ms TTL=128
Reply from 192.168.0.1: bytes=32 time<10ms TTL=128
Reply from 192.168.0.1: bytes=32 time<10ms TTL=128
C:\>
現在偵測網路上的控制器。:
C:\>ping 192.168.0.3
Pinging pc2 [192.168.0.3] with 32 bytes of data:
Reply from 192.168.0.3: bytes=32 time<10ms TTL=128
Reply from 192.168.0.3: bytes=32 time<10ms TTL=128
Reply from 192.168.0.3: bytes=32 time<10ms TTL=128
Reply from 192.168.0.3: bytes=32 time<10ms TTL=128
C:\>
2.4- RC+環境設定 上位控制器(Ex: PC)
從[設置]-[系統配置]-[控制器]-[配置]中選擇您要的控制設備 Ex: PC 。
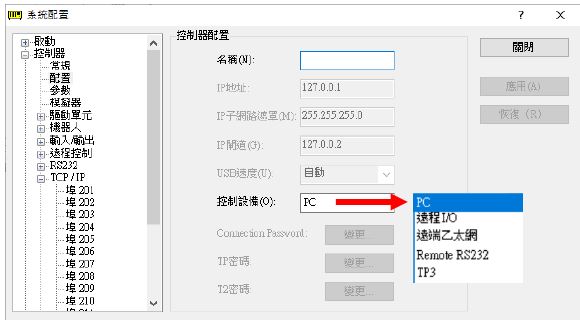
從[設置]-[系統配置]-[控制器]-[TCP/IP]中選擇您要配置的TCP/IP 埠。

* 輸入TCP/IP 埠號。此埠號必須與主機裝置所用的埠號相同。此埠號必須不同於其他TCP/IP 埠所使用的其他TCP/IP 埠號。
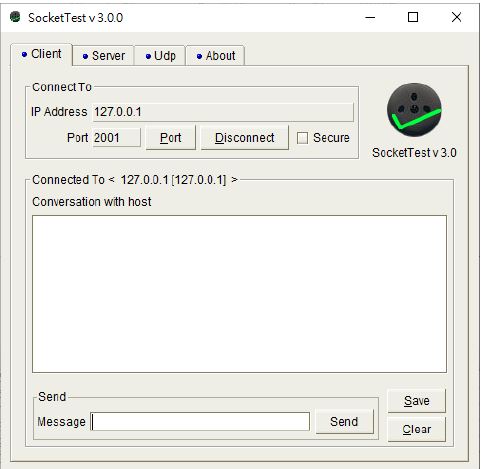
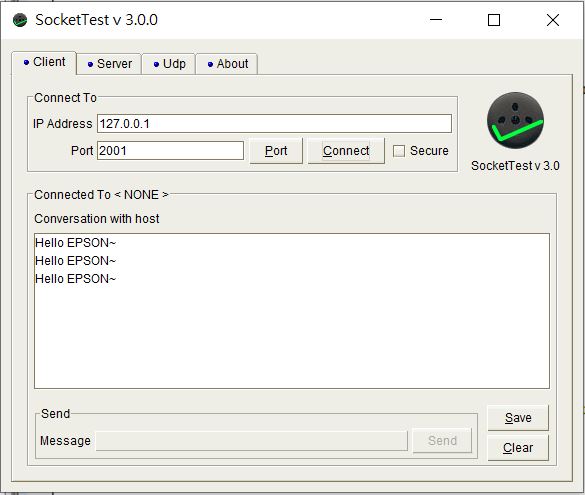
2.5 SocketTest.exe 配置
Port 設定與 RC 控制器一致
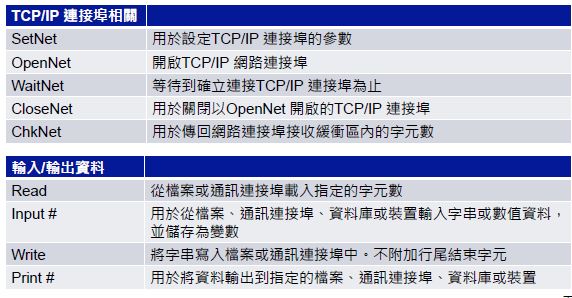
三、 指令介紹
下列表為通訊常見指令列介紹
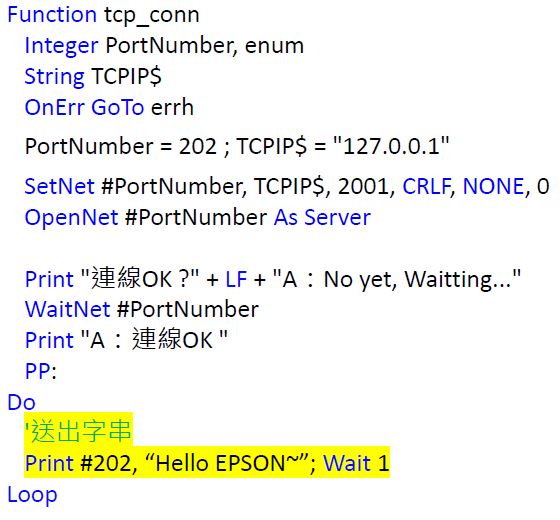
四、 範例程式 (軟件 EPSON RC+ 7.0 )
通訊連結確認與傳送字串
# Server端 ---[RC] 發送文字 # Client端--- [Socket]接收文字
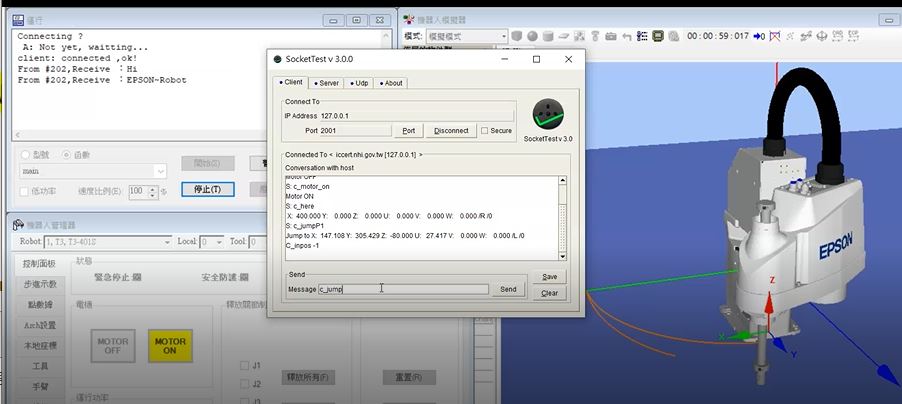
五、 實際應用模擬
藉由 Server 端模擬上位控制器、PLC、PC為主控端發送字串(TCP/IP指令),傳送至 Client 端 機械手臂 RC 接收字串控制指令。
發送字串執行如下 字串代碼 使機器人執行指令動作。
Server端 ---[Socket] 發送文字 >>>> Client端--- [RC]接收文字
字串 " C_motor_on 、 C_motor_off " 開關馬達
字串 " C_distance ":設定 JOG 移動距離
字串 " C_X+,C_X --,C_Y+… " :控制 XYZUVW 方向
字串 " C_here ":回傳現在位置
字串 " C_jump Pxxx",依據目標跑點位置,執行 Jump 門型動作
參考資料.
1. https://www.epson.com.tw
2. EPSON Taiwan 機械手臂展示中心暨實驗室
3. EPSON Robotics_Specifications_2021_Catalog
★博文內容均由個人提供,與平台無關,如有違法或侵權,請與網站管理員聯繫。
★博文作者未開放評論功能