

一. 概述
上篇介紹了” 精闢 !車道偏移原理解密 (下)" ,以清晰的流程圖方式,解密算法是如何運行流程! 並展示各步驟的結果來加強可讀性,最後則是標註實際找到車道線。
然而,這裡將開始正式進入到屬於前車偵測的篇章(粉色章節),此章節為 "詳細解說 !Stixel 物件偵測法",會介紹前車偵測主要核心概念與原理!告訴各位是如何偵測到車輛 ?
此外,世平集團 ATU 團隊精心設計的一套 Sky Eye 開發版,幫助我們一同開闊未來 !!
大大通精彩方案 開闢未來_雙目立體視覺帶你進入 FCW & LDW 新視野
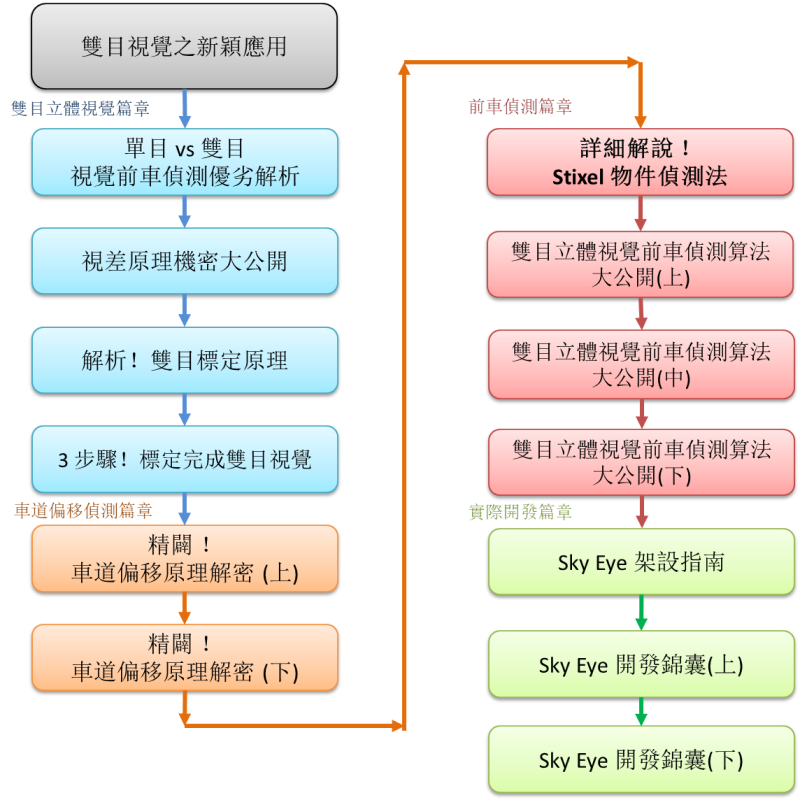
雙目立體視覺技術指南 (前車偵測) - 文章架構示意圖
首先,探討雙目立體視覺前車偵測演算法的核心 Stixel 物件偵測演算法(Stixel Object Detection)。
二. 基礎原理 - Stixel 物件偵測演算法(Stixel Object Detection)
Stixel 是由一組長條型的區域構成的中階訊息表達方式,有別於單一像素多了長度的概念。
若此概念用於物件偵測的話,長度則示為物體的高度資訊。如示意圖所示,清楚地呈現像素(Piexel) 與 Stixel 、Region各個差異,其中 Region 是表示一個區域的高階訊息表達方式,可視為成整個物件。
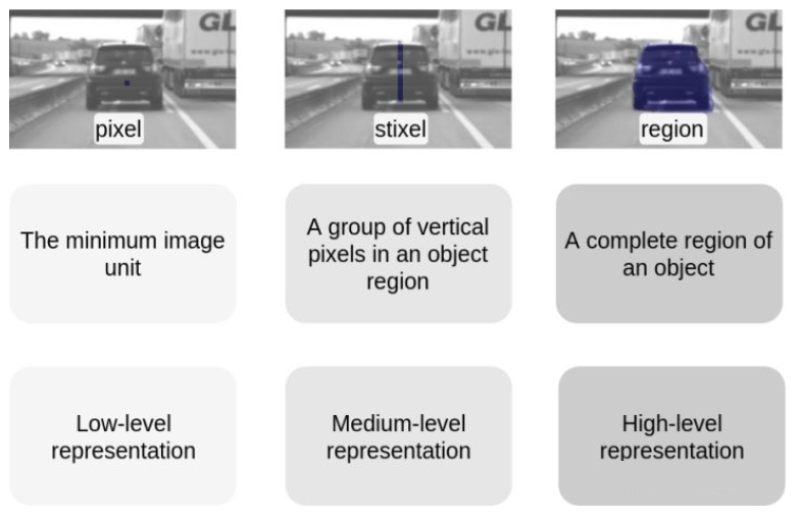
Pixel、Stixel 與 Region 概念示意圖
如同下方示意圖,所謂的 Region,就是從圖片取得數條相應的 Stixel 資訊,並將其資訊組成 Region 形式。
而為了避免與英文意義混淆,後續文章以 Stixel 物件的形式表示。
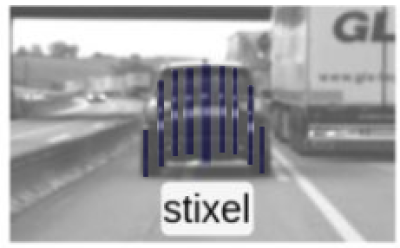
Stixel 物件示意圖
在雙目立體視覺前車偵測演算法之中,必須先前取得兩鏡頭所構成的視差影像,接著由演算法將影像中的場景分為天空、地面與物體三大種類(似標籤 Labeling 方式),如下圖中的 Labeling 所示。而 Stixel 演算法就是負責統計圖形中物件的資訊,並由長條資訊 Stixel 的概念,將其組成物件的資訊,如下圖中的 Stixel Image 所示。
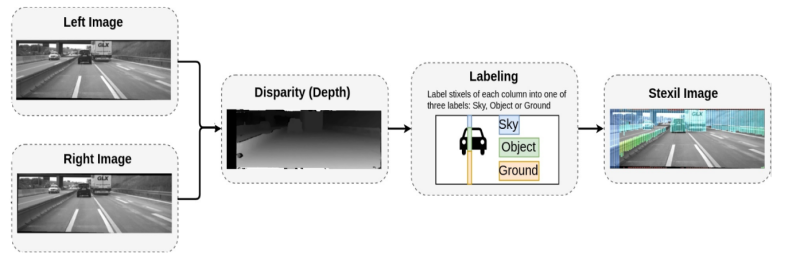
Stixel 演算流程示意圖
Stixel 統計方式就如下圖所示,先從影像底部開始進行檢測,途中會檢測到屬於地面標籤,當第一次檢測到物件標籤時,則開始記錄 Stixel 資訊 ; 分別記錄地面資訊、視差值、位置等資訊。持續檢測到屬於非物件標籤或是視差小於 0 的特徵點時,則結束紀錄,最後統計高度資訊並將整個 Stixel 資訊記錄至記憶體中。
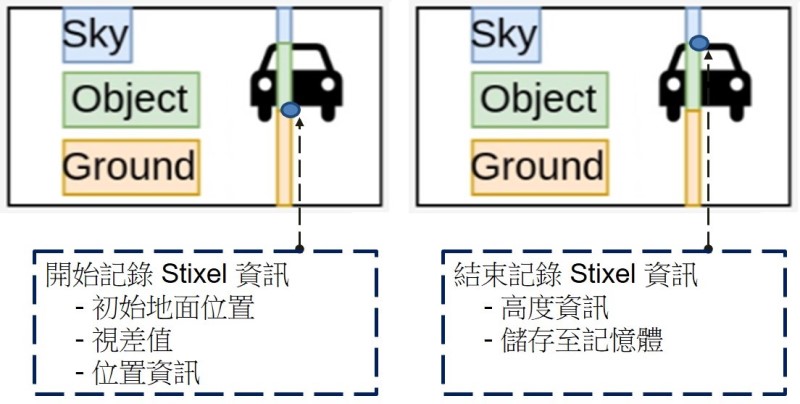
Stixel 統計方式示意圖
最後,從左至右掃描檢測影像,紀錄完成所有的 Stixel 資訊後。即可用後續的算法,以 multimap 方式,將所有 Stixel 資訊展開成 Stixel 物件,並利用實際距離、寬度等條件進行 Stixel 物件篩選。
上述,為 Stixel 物件偵測演算法的介紹,亦是雙目立體視覺前車偵測的主要概念之一。
不妨試著想像雙目立體視覺的三維空間與 Stixel 物件偵測的概念是如何成立的 ? 當然,這是需要一點想像力 ! 透過這種方式理解能更清楚知道,概念是如何衍伸 !
後續文章將介紹 Stixel 物件偵測演算法運用於 雙目立體視覺前車偵測(粉色章節) 所須的基礎原理。敬請期待 ! ! “ 雙目立體視覺前車偵測算法大公開 (上) “
三. 參考文件
[1] 每日頭條網站 - 雙目立體視覺技術的實現
[2] 每日頭條網站 - 雙目立體視覺測量系統應用
[3] 每日頭條網站 - ADAS單目/雙目/三目到底有什麼區別?
[4] 維基百科 - Block-matching algorithm
[5] 論文 - Performance Analysis between Basic Block Matching and Dynamic Programming of Stereo Matching Algorithm
[6] 教材 - Stereo Vision by Professor Fei-Fei Li
[7] 維基百科 - Epipolar geometry
[8] 維基百科 - 單應性
[9] 論文 - A Flexible New Technique for Camera Calibration
[10] 數學工廠 - Camera Calibration 相機校正
[11] CSDN - 雙目測距(雙目標定、雙目校正和立體匹配)
[12] 官方網站 – GNU Octave
[13] 官方網站 – Camera Calibration Toolbox for Matlab
[14] 維基百科 - Hough transform
[15] 論文 - Chong-Wei Li , Jui-Cheng Yen and Hun-Chen Chen, "Safe Driving Monitoring System", June. 2014.
[16] 論文 - Hernán Badino, Uwe Franke, David Pfeiffer, ”The Stixel World - A Compact Medium Level Representation of the 3D-World”, September 2009
[17] 數據邦 - 雙目的終極奧義:Stixel柱狀像素
如有任何相關 雙目立體視覺(Stereo Vision) 技術問題,歡迎至博文底下留言提問 !!
接下來還會分享更多 雙目立體視覺(Stereo Vision) 的技術文章 !!敬請期待 【Sky Eye 開闊未來】 !!

評論