

一. 概述
上一篇文章介紹了 ”單目 vs 雙目視覺的前車偵測優劣解析“ ,雙目立體視覺的優劣勢也適用於任何的新應用中,比如說空拍機或是掃地機器人等等。
接下來,將帶領各位進一步認識視差為何 ? 為何雙目立體視覺可以模擬人眼 ? 此次介紹章節為 “視差原理機密大公開析” 屬於雙目立體視覺篇章,時不宜遲 ! 趕快一同探討視差原理的奧妙吧 !
此外,世平集團 ATU 團隊精心設計的一套 Sky Eye 開發版,幫助我們一同開闊未來 !!
大大通精彩方案 開闢未來_雙目立體視覺帶你進入 FCW & LDW 新視野
雙目立體視覺技術指南 (前車偵測) - 文章架構示意圖
雙目立體視覺是由測距與視差兩大原理所構成。如下圖所示,其中裡面結合運用很多光學成像原理,我們可以藉由攝像頭內部的焦距與兩顆鏡頭所產生的視差,並推導出鏡頭與影像呈現的關係,即可算出實際距離。
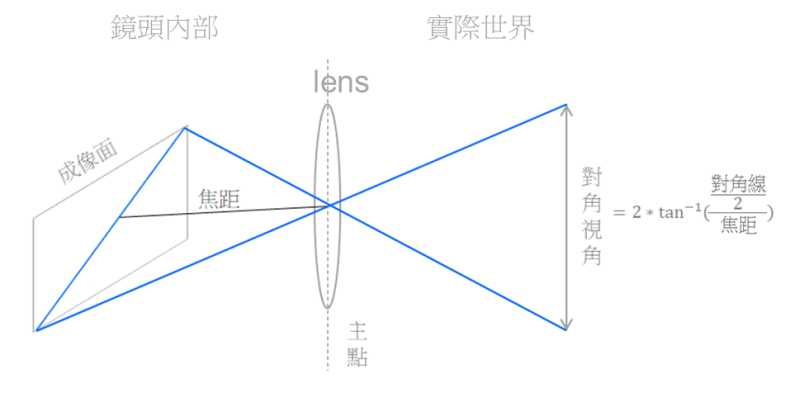
光學成像示意圖
下列小節會將介紹將依序介紹 “視差” 與 “測距” 原理。
二. 測距原理
測距原理是基於光學針孔原理與視差原理所構成,如下圖所示,首先假想兩顆鏡頭皆能觀察到同一個物體的狀況下,即可形成示意圖上的 三角形A 的平面。而三角形的底部即代表兩顆鏡頭之間的距離,這裡定義為 q ,此外三角形的高度即為鏡頭與物體的距離,定義為 z。
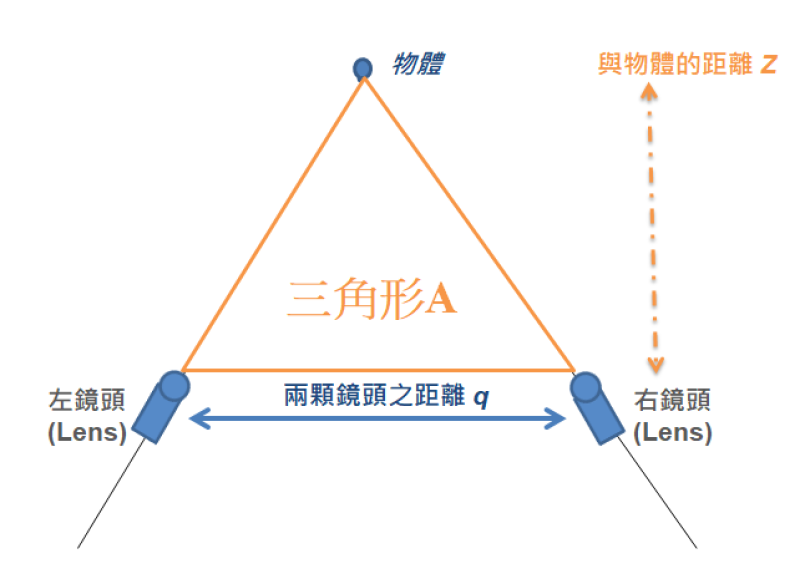
測距原理示意圖(1)
鏡頭與物體之間的距離即為需找出的部分,因此需要透過光學成像原理來輔助我們推導出此關係。由針孔原理關係可得知,鏡頭內部空間的焦距與成像的像素位置,來揣摩出另一個 三角形B 的平面。如下圖所示, 三角形B 的底部為同一個物體於兩顆鏡頭所呈現的視差,定義為 d,即為在像素上的差距 (視差), 三角形B 的高度部分則是代表鏡頭的焦距,定義為 f 。
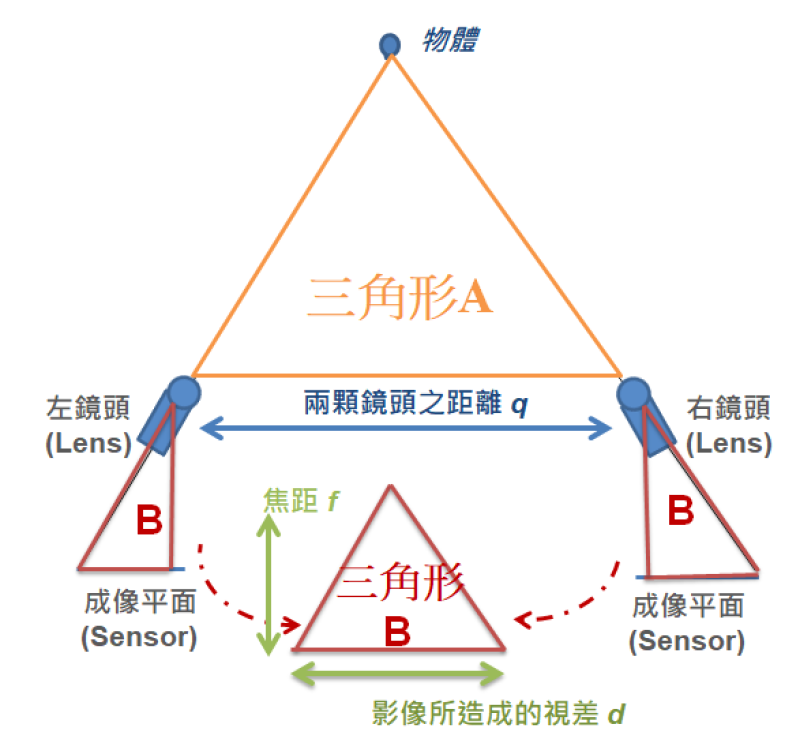
測距原理示意圖(2)
已知的參數值有焦距 f 、視差距離 d、兩顆鏡頭之間的距離 q 這三個參數。
此原理需要維持兩個 三角形 A 與 B 的比例,也就是說
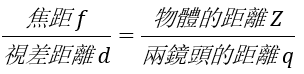
將等式換位,即可求得 鏡頭與物體之間的距離Z

三. 視差原理
視差原理概念是來至於人眼的構造。這裡有個小實驗可以幫助加快理解視差的特性,請你的大拇指貼至鼻尖約 3 公分距離,以一隻眼睛注視著大拇指,並任意交換左右眼睛,即可發現拇指位移的很大。若是將手伸長至遠處,再次利用此方法將會發現,拇指的位移變小了。有點類似著名的拇指測距法,如下圖所示,請以拇指感受視差的特性。
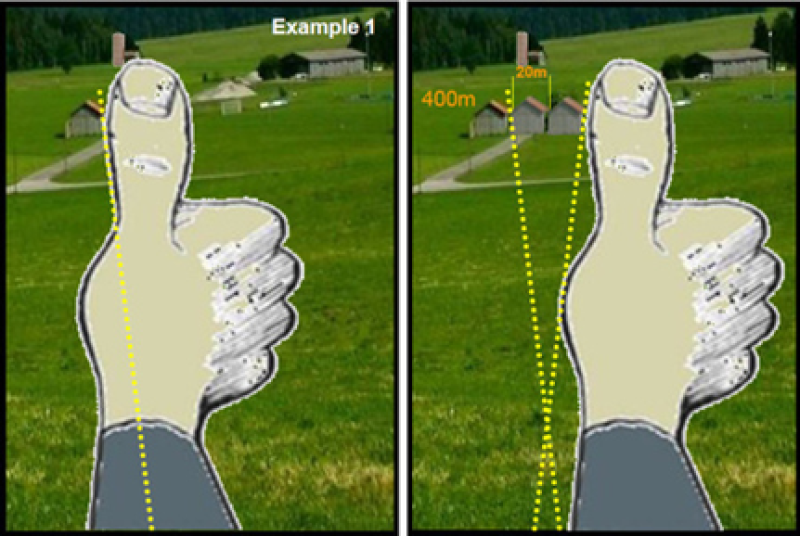
視差實驗示意圖
圖文出處 : https://liuyunantw.pixnet.net/blog/post/380380427
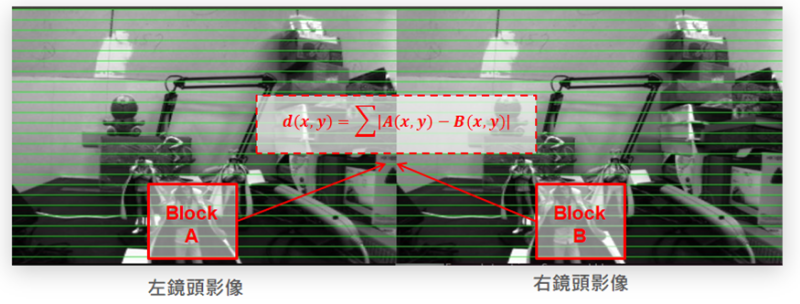
這就是視差的特性。而此小節則是把這種視差的特性運用於電腦視覺中,所衍生出一種算法稱作 區塊比較 Block Match,簡稱 BM 。這個算法幫助我們模擬兩顆鏡頭所造成的視差,亦是後續主力算法之一,如下圖所示,我們需要取得左鏡頭與右鏡頭相對位置上的區塊資訊(Block) ,並比較這兩塊區塊的差異值作為視差d。
BM算法示意圖
依公式並配合上圖來說明

即可表示成左邊影像區塊為 Block A 、 右邊影像區塊為 Block B,將兩區塊內的矩陣數值作相減,並取絕對值。最後再累加其值,即為在電腦視覺中 ”視差” 的定義。
可想像若拍攝場景為背景時,兩邊區塊比較起來,所呈現的視差值應接近於 0,反之若是拍攝場景有物體時,兩邊區塊比較起來,因視差的特性,所呈現的視差值必有值,且…
「物體越近,視差影響越大,視差值亦越大,反之物體越遠,視差影響越小,視差值亦越小。」
因此利用這樣的特性,將視差值作正規化,即可顯示成圖像。
如下圖所示,左側為原始圖片,右側為視差圖,其中像素值有白色到深灰色的部分,即表示物體的遠近。白色則表示物體越近,越接近黑色則表示物體越遠。
*** 視差影像(視差圖) 亦可使用彩色的方式呈現,僅須自行建立色彩對應表。比如說紅色代表物體近、藍色代表物體遠 !!

視差構成結果之示意圖
相信各位對於測距與視差原理有一定的認識了。在此統整一下,測距原理是透視差的方式來量測距離(拇指測距法),視差原理則是將視差轉換電腦視覺中描述的原理。在此說明了雙目立體視覺是如何測距 ? 如何模擬視差? 原理的奧妙 ! 下一章節 “解析 !雙目視覺標定原理”,將說明雙目立體視覺的關鍵技術,與校正息息相關 ! 也是最重要的一環 ! !
四. 參考文件
[1] 每日頭條網站 - 雙目立體視覺技術的實現
[2] 每日頭條網站 - 雙目立體視覺測量系統應用
[3] 每日頭條網站 - ADAS單目/雙目/三目到底有什麼區別?
[4] 維基百科 - Block-matching algorithm
[5] 論文 - Performance Analysis between Basic Block Matching and Dynamic Programming of Stereo Matching Algorithm
[6] 教材 - Stereo Vision by Professor Fei-Fei Li
如有任何相關 雙目立體視覺(Stereo Vision) 技術問題,歡迎至博文底下留言提問 !!
接下來還會分享更多 雙目立體視覺(Stereo Vision) 的技術文章 !!敬請期待 【Sky Eye 開闊未來】 !!

評論