

1. 概述
1.1 功能描述
本範例將使用 S32DS PA SDK 對 MPC5777C 中的定週期中斷 (Periodic Interrupt Timer , PIT ) 模組進行設置,使其輸出分別週期為 0.1s、1s、5s 的中斷程式,並在其中更改 LED 的狀態。
1.2 硬體工具
MPC5777C-DEVB 評估板
PEmicro Multilink Universal 燒錄器
1.3 軟體工具
S32 Design Studio IDE for Power Architecture , 版本 2017.R1 , Build id: 171018
S32 SDK PA , BETA 2.9.0
1.4 相關範例程式
..\MPC5777C_PIT.zip
2. SDK 說明與使用
2.1 概述
S32 SDK PA 可以在 S32 Design Studio IDE 開發環境中使用 Processor Expert 工具配置使用者需要的設置,並自動生成設置檔案,提供快速便捷的 Device 與 IP 設置方式。
2.1.1 SDK 版本說明
SDK 的版本分為以下三種,本範例使用 S32 SDK PA BETA 2.9.0:
- EAR : Early Assess Release,早期評估版,是 SDK 最先發布的版本,提供基本的SDK 功能,可以做為早期軟體評估使用。
- BETA : Beta 版是修復 EAR 版若干 Bug 後發布的 SDK 版本,相較於 EAR 版本,功能更加完善。
- RTM : Ready To Manufacture,最終量產版本,提供最完善的 API 接口及外設 IP 配置選項,修復
2.1.2 S32 Design Studio IDE 的使用方式
關於 S32 Design Studio 的使用方式,請參考文件 “ S32 Design Studio 使用教學 ”。
2.1.3 SDK 的取得與安裝方式
關於 SDK 的取得與安裝方式,請參考文件 “MPC57xxx IDE & Tools 下載與安裝教學 ”。
2.1.4 安裝後 SDK 相關檔案
S32 SDK 預設安裝路徑在 S32 Design Studio IDE 資料夾下,可以同時存在不同的版本。安裝後路徑如下:
C:\NXP\S32DS_Power_v2017.R1\S32DS
選取本範例使用的 BETA 2.9.0 版本進入後,可以找到 SDK 的使用文件
- Release Note :
C:\NXP\S32DS_Power_v2017.R1\S32DS\9.0\S32_SDK_for_Power_Architecture_BETA_2_9_0_Release_Notes - 網頁版的 User Manual :
C:\NXP\S32DS_Power_v2017.R1\S32DS\S32_SDK_S32PA_BETA_2.9.0\doc\Start_here.html - PDF 版的 User Manual :
C:\NXP\S32DS_Power_v2017.R1\S32DS\S32_SDK_S32PA_BETA_2.9.0\doc\S32SDK_MPC5777C_UserManual.pdf
2.2 啟用 Processor Expert 介面檢視
預設的工作站可能沒有開起 Processor Expert 介面。
要開啟介面,請在工作列中選擇 Processor Expert -> Show View
2.3 Component Library 頁面
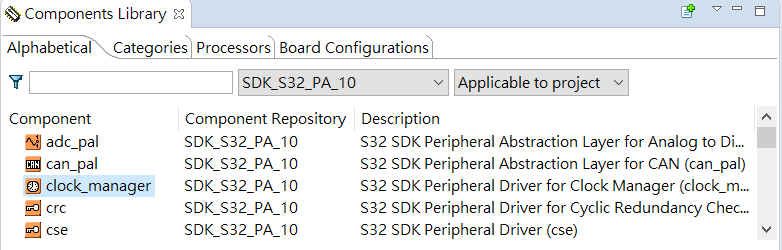
上圖為 Component Library 頁面,內容如下 :
- Alphabetical : 依字母序排列的 SDK 元件列表
- Categories : 依分類顯示的 SDK 元件列表
- Processor : 當前專案可使用的處理器配置列表
2.4 Components 頁面
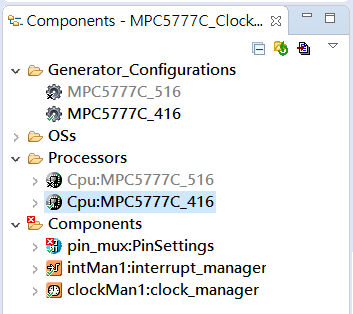
上圖為 Components 頁面,包含了目前已加入專案的設置與 SDK 元件。其中 :
- 右上角的 Reload Project 按鈕可以將儲存的設置重新載入 Processor Expert
- 右上角的 Generate Processor Expert Code 按鈕可以將當前的 SDK 設置輸出至 Project 中
 元件或設置圖示,左下角處的綠色 “v”代表當前使用中的元件或配置。
元件或設置圖示,左下角處的綠色 “v”代表當前使用中的元件或配置。 元件或設置圖示,左下角處的黑色 “x”代表當前該元件或設置不被使用。
元件或設置圖示,左下角處的黑色 “x”代表當前該元件或設置不被使用。 元件或設置圖示,左上角處的紅色 “x”代表目前的配置內容有錯誤需要修正。
元件或設置圖示,左上角處的紅色 “x”代表目前的配置內容有錯誤需要修正。 元件或設置圖是左方的箭頭,單擊可以展開該元件一般使用的 API 選單。
元件或設置圖是左方的箭頭,單擊可以展開該元件一般使用的 API 選單。
滑鼠停留可以看到 API 所需的輸入參數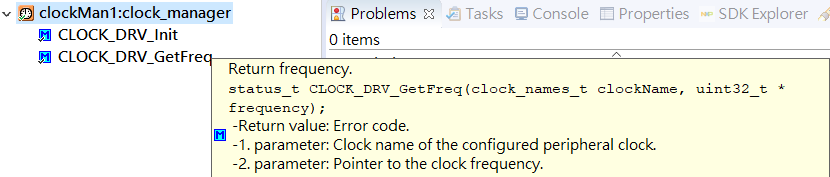
此處顯示的 API可以直接以滑鼠拖曳到程式當中,不須使用者定義的參數會自動填入,需使用者定義的參數會留白。
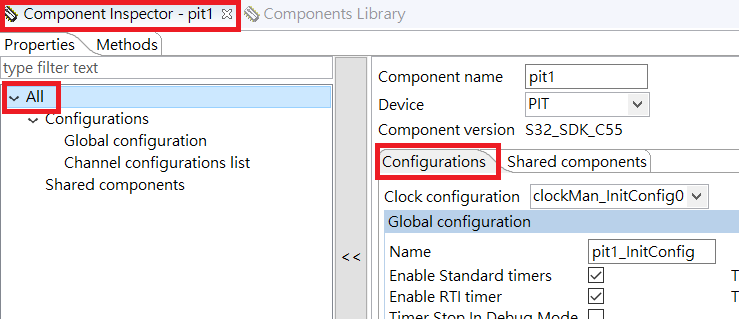
2.5 Component Inspector 頁面
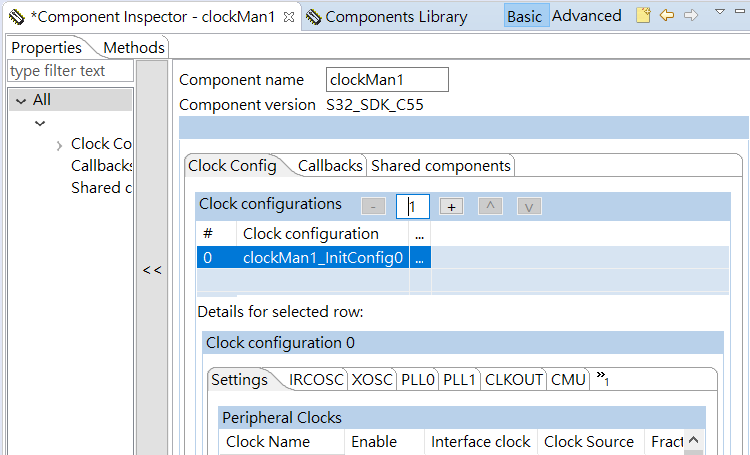
Component Inspector 頁面顯示的是目前在 Components 頁面中選取的項目設置,內容會隨選取的項目不同而切換。上方圖例中,選擇的是命名為 clockMan1 的 Clock_Manager 元件。
- Properties 分頁顯示的是 SDK Component 的設置介面
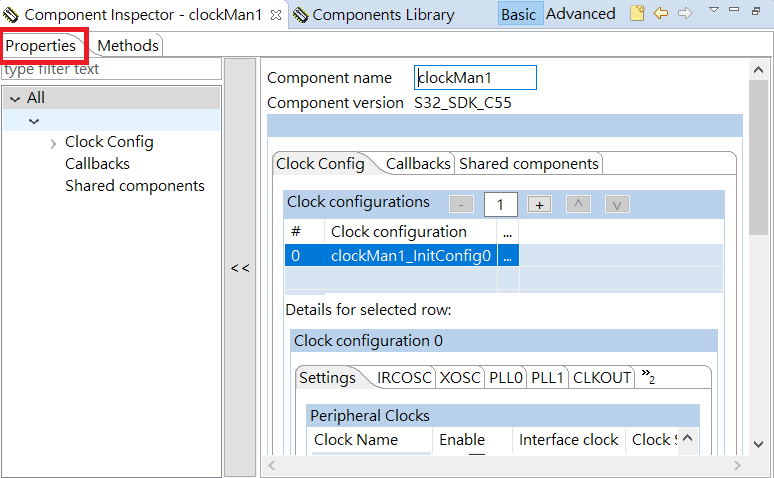
- Methods 頁面顯示的是該元件一般狀況下使用的 API 列表

3. 原理
3.1 PIT 框圖
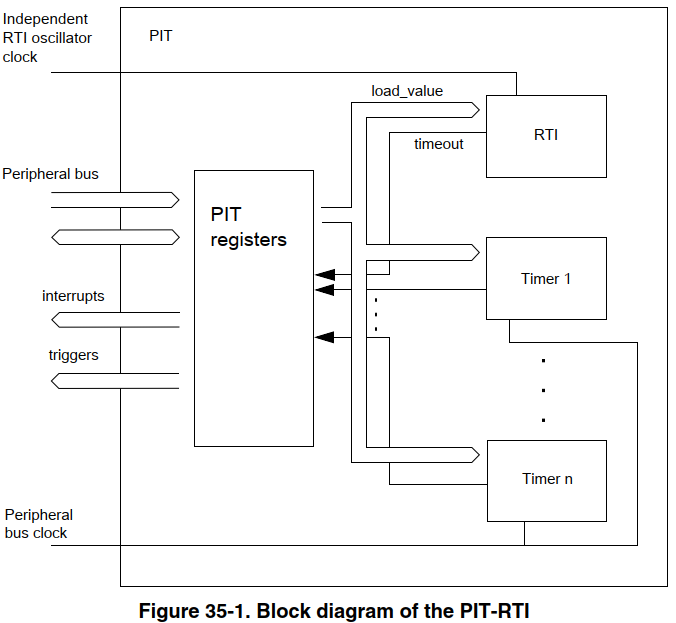
3.2 PIT 介紹
PIT 模組由一組四路可互相串聯或獨立運行的計數器,以及一個獨立的實時中斷計數器 ( Real Time Interrupt timer, RTI ) 組成。計數器可用於觸發中斷或其他周邊,其中 RTI 使用獨立的時脈,可以用於待機模式下的喚醒功能。
3.3 硬體功能描述
- MPC5777C-DEVB 上的 User LED
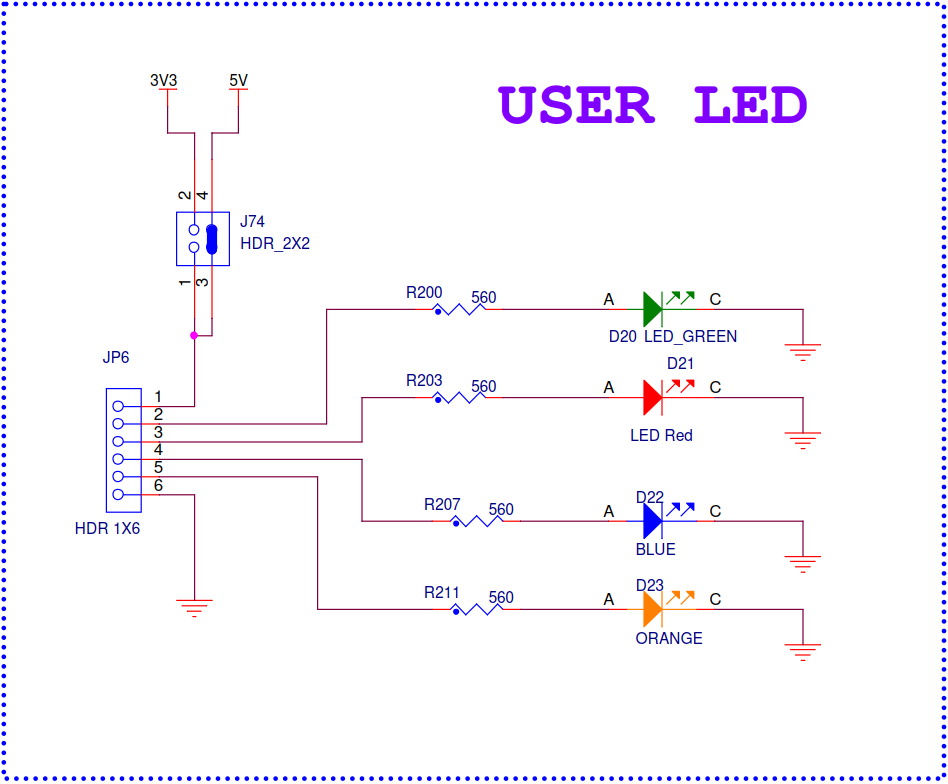
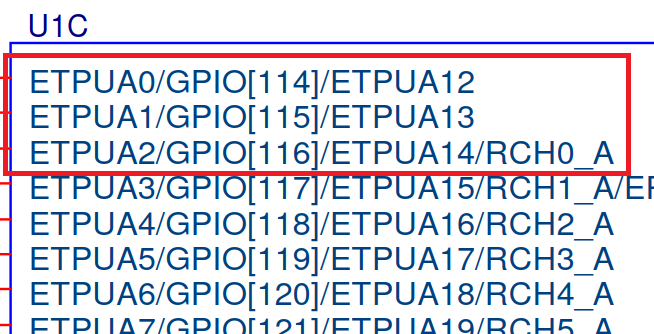
- 用於 LED Toggle 的 GPIO 腳位
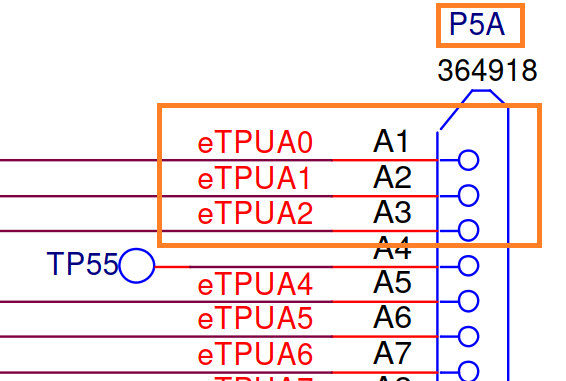
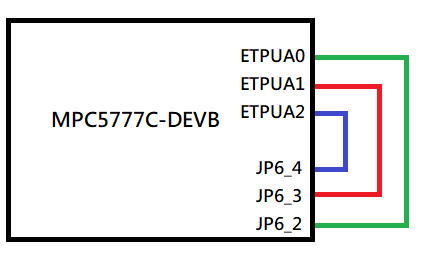
- 硬體連接圖
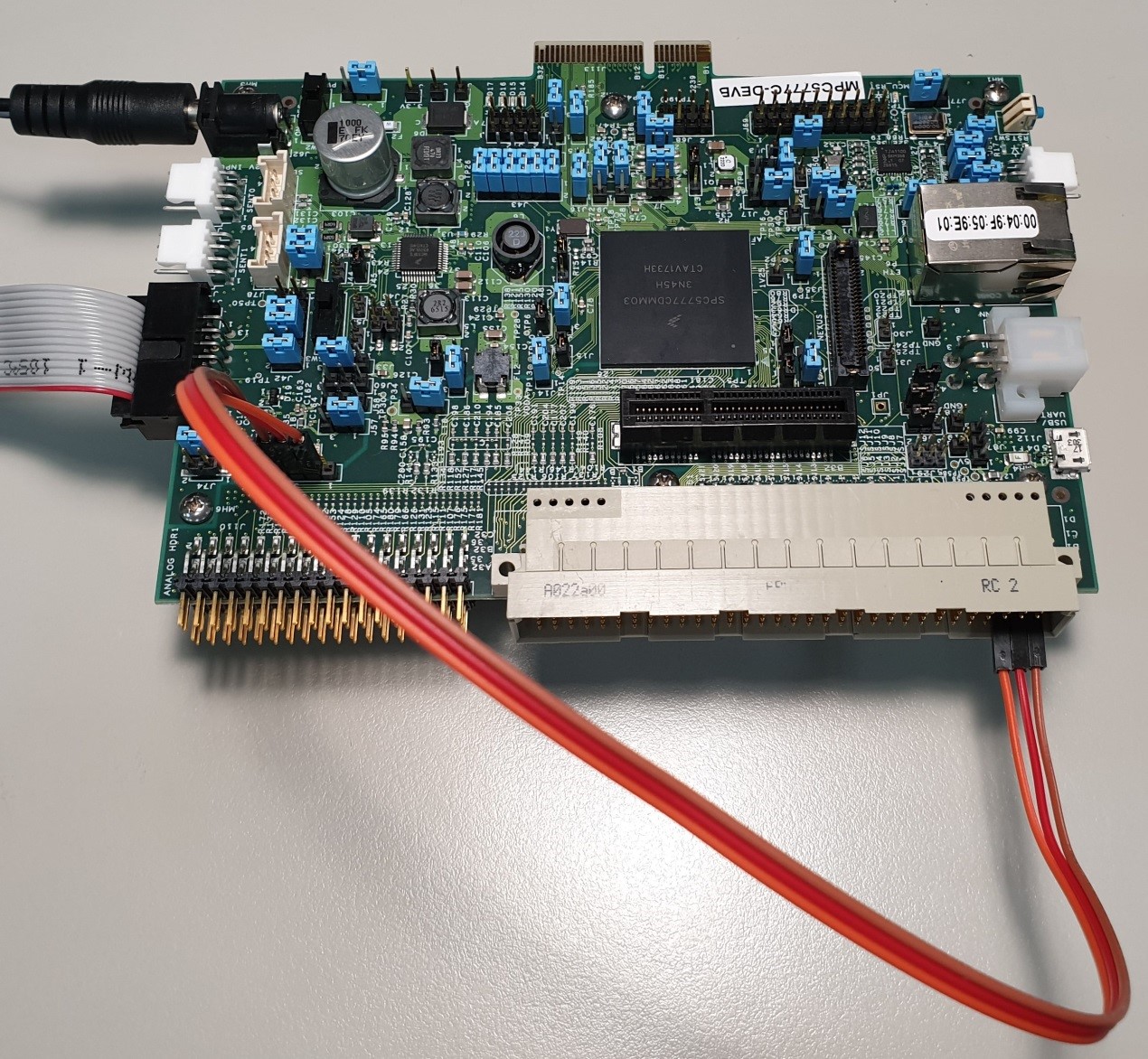
- 實際連接圖
4. 程式功能描述
4.1 功能概述
本範例將使用 S32DS PA SDK 對 MPC5777C 中的 PIT 模組進行設置,使其輸出分別週期為 0.1s、1s、5s 的中斷程式,並在其中更改 LED 的狀態。
4.2 程式流程圖
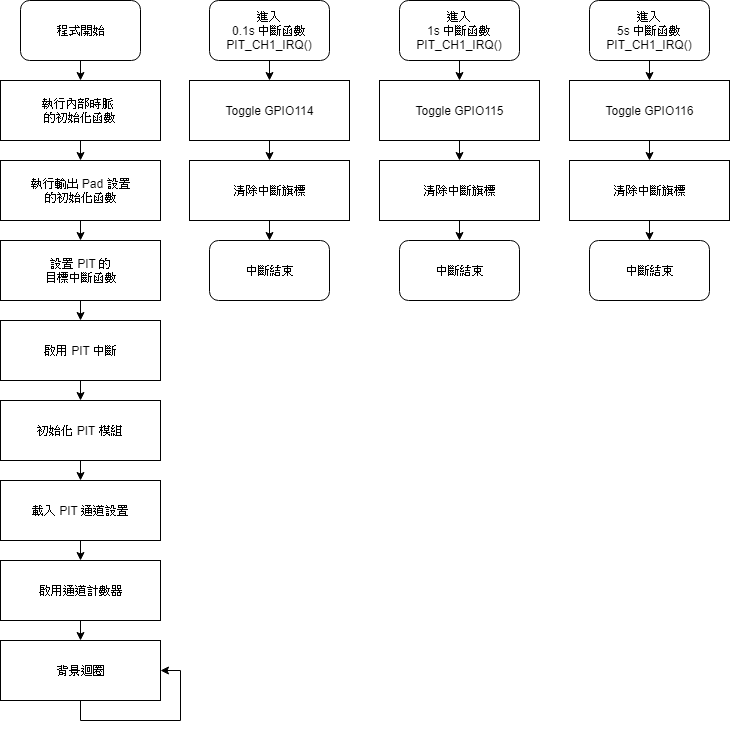
5. SDK 設置說明
本範例程式使用三組一般計數器通道,其設置如下:
- 通道 0 設置為每1s 觸發一次。
- 通道 1 設置為每 1s 觸發一次。
- 通道 2 設置與通道 1 串聯,每 5 次觸發一次。
5.1 開啟 SDK 設置介面
在 Component 中雙擊欲修改的元件,來開啟 Inspector 頁面。
Step 1 :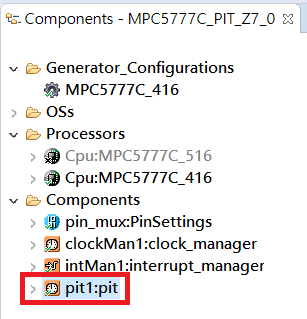
Step 2 :
5.2 設置計數器時脈
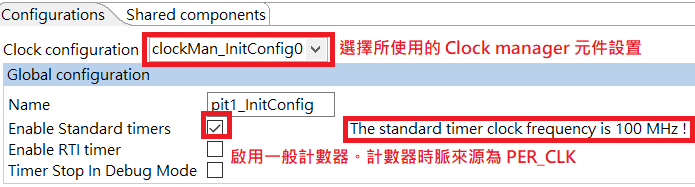
設置 PIT 計數器時脈,需選擇所要使用的 Clock Manager 元件設置,一般計數器的時脈來源為 PER_CLK,而 RTI 計數器的時脈來源為 XOSC。
此處會與 Clock manager 中的設置連動。
5.3 設置 PIT 通道
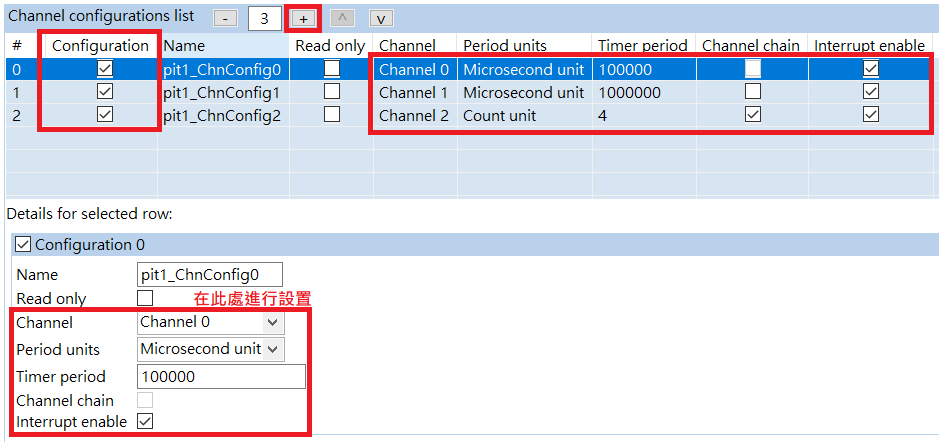
- 點選
 兩次,將通道設置新增為三組。
兩次,將通道設置新增為三組。 - 將 pit1_ChnConfig0 設置為 Channel 0,週期為 100000 Microsecond。
- 將 pit1_ChnConfig1 設置為 Channel 1,週期為 1000000 Microsecond。
- 將 pit1_ChnConfig2 設置為 Channel 2,週期為 4 Count unit,並將 Channel chain 勾選,使其串聯 Channel 1。
6. API 函數介紹
6.1 CLOCK_DRV_Init(clock_user_config_t const * config)
6.1.1 功能描述
僅將時脈設置為輸入的設置結構體。具體步驟:
- 時脈設置 Reset
- 設置 PLL 時脈源
- 設置 SIU 選擇時脈與分頻器
- 設置 CMU
6.1.2 函數原型
status_t CLOCK_DRV_Init(clock_user_config_t const * config);6.1.3 參數
-
clock_manager_user_config_t const **clockConfigsPtr
透過 Processor Expert 所生成時脈設置的結構體。
6.1.4 返回值
若所有內部函數回傳STATUS_SUCCESS,回傳 STATUS_SUCCESS,否則回傳最後的回傳值。
6.1.5 示例
以下範例將設置變更為 g_clockManConfigsArr[0],並將執行結果回傳至 status。
status_t = status;
CLOCK_DRV_Init(g_clockManConfigsArr[0]);
6.2 PINS_DRV_Init(uint32_t pinCount, const pin_settings_config_t config[])
6.2.1 功能描述
設置輸出 Pads 至所選擇的功能。
6.2.2 函數原型
status_t PINS_DRV_Init(uint32_t pinCount, const pin_settings_config_t config[]);6.2.3 參數
- uint32_t pinCount
被設置的 Pads 數量。 - const pin_settings_config_t config[]
Pads 設置內容儲存的矩陣。
6.2.4 返回值
若所有內部函數回傳STATUS_SUCCESS,回傳 STATUS_SUCCESS,否則回傳最後的回傳值。
6.2.5 示例
以下範例將 Pads 設置載入並初始化,並將執行結果回傳至 status。
status_t = status;
status = PINS_DRV_Init(NUM_OF_CONFIGURED_PINS, g_pin_mux_InitConfigArr);其中,NUM_OF_CONFIGURED_PINS 與 g_pin_mux_InitConfigArr 為 Processor Expert 自動生成的參數,只需將 API 由 Components 頁面拖曳至程式碼中便會自動加入。
6.3 INT_SYS_InstallHandler(IRQn_Type irqNumber,
const isr_t newHandler,
isr_t* const oldHandler)
6.3.1 功能描述
為給定的 IRQ 編號註冊對應的中斷處理程式,並可以將舊的程式指標留做復原使用。
6.3.2 函數原型
void INT_SYS_InstallHandler(IRQn_Type irqNumber,const isr_t newHandler,isr_t* const oldHandler);6.3.3 參數
- IRQn_Type irqNumber
h 中給定的 IRQ 編號。 - const isr_t newHandler
新的 IRQ 程式名稱 - isr_t* const oldHandler
儲存舊的 IRQ 程式指標
6.3.4 返回值
無。
6.3.5 示例
以下範例將程式 PIT_CH1_IRQ() 註冊為 PIT 通道 0 的中斷處理程式。
void PIT_CH1_IRQ(void);
void PIT_CH1_IRQ(void){ }
int main (void)
{
INT_SYS_InstallHandler(PIT_RTI0_IRQn, PIT_CH1_IRQ, NULL);
}
6.4 INT_SYS_EnableIRQ(IRQn_Type irqNumber)
6.4.1 功能描述
啟用給定的 IQR 編號對應的中斷。
6.4.2 函數原型
void INT_SYS_EnableIRQ(IRQn_Type irqNumber);6.4.3 參數
- IRQn_Type irqNumber
h 中給定的 IRQ 編號。
6.4.4 返回值
無。
6.4.5 示例
以下範例將啟用 PIT 通道 0 的中斷處理程式。本函數需要任何 PIT API 呼叫以前初始化。
INT_SYS_EnableIRQ(PIT_RTI0_IRQn);
6.5 PIT_DRV_Init( const uint32_t instance,
const pit_config_t * const config)
6.5.1 功能描述
初始化 PIT 模組的時脈,並設置 Debug 模式下的行為。
6.5.2 函數原型
void PIT_DRV_Init(const uint32_t instance,const pit_config_t * const config);6.5.3 參數
- const uint32_t instance
PIT 模組的編號。 - const pit_config_t * const config
由 Processor 產生的 PIT 模組設置矩陣。
6.5.4 返回值
無。
6.5.5 示例
以下範例將初始化 PIT 模組。
PIT_DRV_Init(INST_PIT1, &pit1_InitConfig);6.6 PIT_DRV_InitChannel(const uint32_t instance,
const pit_channel_config_t * const chnlConfig)
6.6.1 功能描述
初始化 PIT 通道設置。此 API 函數不會使計數器開始計數。
6.6.2 函數原型
status_t PIT_DRV_InitChannel(const uint32_t instance, const pit_channel_config_t * const chnlConfig);6.6.3 參數
- const uint32_t instance
PIT 模組的編號。 - const pit_channel_config_t * const chnlConfig
由 Processor 產生的 PIT 通道設置。
6.6.4 返回值
無。
6.6.5 示例
以下範例將 Processor Expert 產生的通道設置 pit1_ChnConfig0 載入 PIT 模組之中,並將執行結果回傳至 status。
status_t = status;
status = PIT_DRV_InitChannel(INST_PIT1, &pit1_ChnConfig0);
6.7 PIT_DRV_StartChannel(const uint32_t instance,
const uint8_t channel)
6.7.1 功能描述
使指定的通道開始計數。
6.7.2 函數原型
void PIT_DRV_StartChannel(const uint32_t instance, const uint8_t channel);6.7.3 參數
- const uint32_t instance
PIT 模組的編號。 - const uint8_t channel
要開始計數的通道編號。
6.7.4 返回值
無。
6.7.5 示例
以下範例將使pit1_ChnConfig0所設置的通道開始計數。
PIT_DRV_StartChannel(INST_PIT1,pit1_ChnConfig0.hwChannel);
7. 測試結果
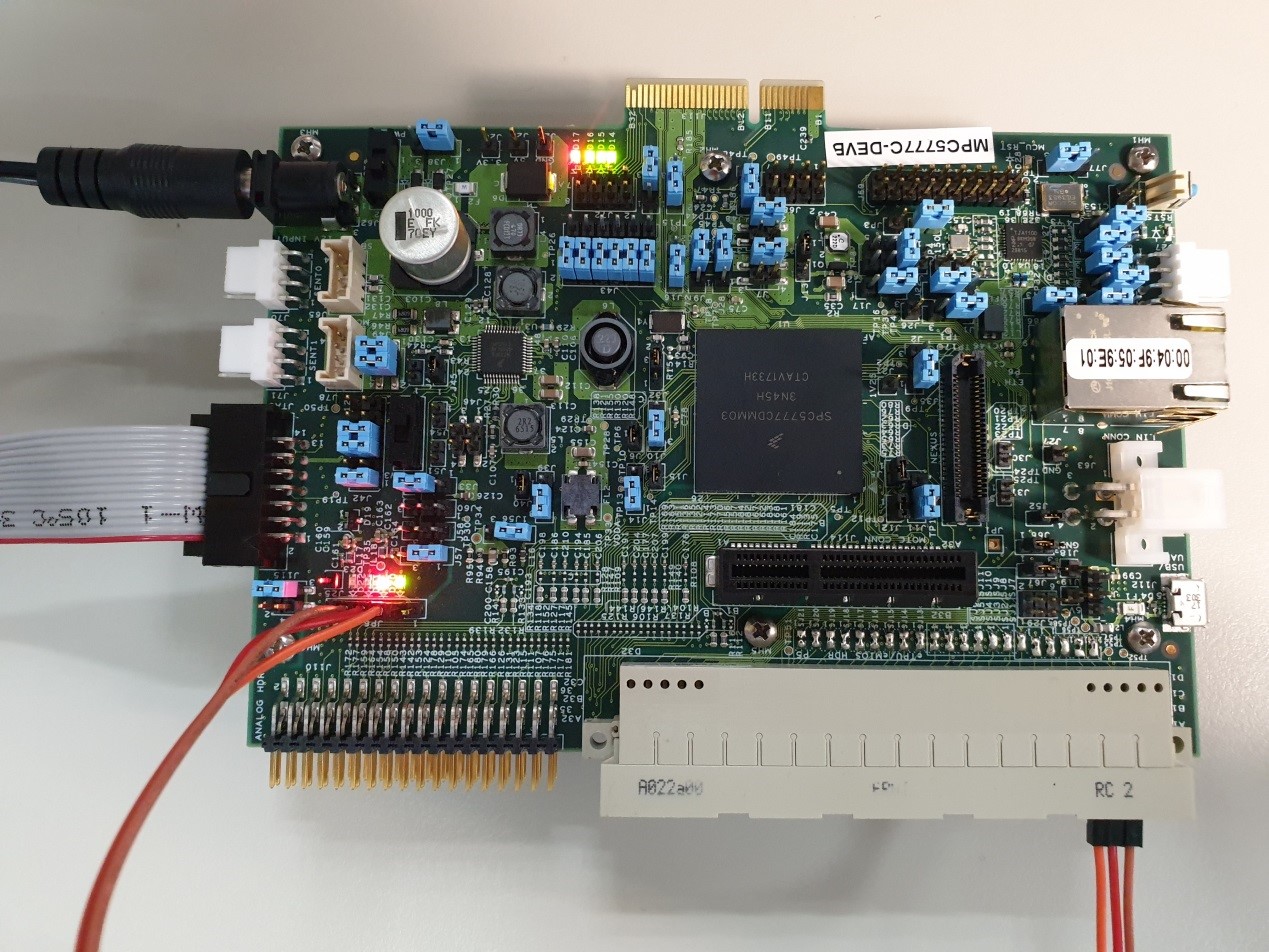
若接線正確,LED 將以下方頻率閃爍:
- 綠色 LED (GPIO114) 以1s 為間隔閃爍。
- 紅色 LED (GPIO115) 以 1 s 為間隔閃爍。
- 藍色 LED (GPIO116) 以 5 s 為間隔閃爍。
8. 參考資料
- MPC5777C Reference Manual , Rev. 8.1
https://www.nxp.com/docs/en/reference-manual/MPC5777CRM.pdf - S32 PA SDK BETA 2.9.0 User Manual
file:///C:/NXP/S32DS_Power_v2017.R1/S32DS/S32_SDK_S32PA_BETA_2.9.0/doc/html_MPC5777C/index.html