

本文將介紹TT_M4G9與TT_M3HQ搭配MPU6050六軸感測器演示案例,我們將使用Toshiba TMPM4G9與TMPM3HQ分別連接MPU6050六軸感測器模組,借由MCU I2C介面初始化MPU6050六軸感測器模組並將感測器的加速器與陀螺儀偵測數據分別由Console mode方式與LCD屏幕方式做顯示。本次演示依照官網了說明僅在LCD功能尚需要更換正確版本即可將演示範例實現。
首先先針對使用感測器元件硬體規格說明:
MPU6050六軸感測器模組: (外購獲得如下圖)
MPU6050整合了3軸陀螺儀、3軸加速器,由主要I2C端口以單一數據流的形式,向應用端輸出。MPU6050的角速度全格感測範圍為±250、±500、±1000與±2000°/sec (dps),可准確追緃快速與慢速動作,並且,用戶可程式控制的加速器全格感測範圍為±2g、±4g±8g與±16g;同時可在不同電壓下工作,VDD供電電壓介為2.5V±5%、3.0V±5%或3.3V±5%,邏輯接口VVDIO供電為1.8V± 5%。
規格參數:
- 供電電源:3-5V(內部低壓差穩壓)
- 通信方式:標准IIC通信協議
- 晶片內置 16bit AD轉換器,16位數據輸出
- 陀螺儀範圍:±250 500 1000 2000 °/s
- 加速度範圍:±2±4±8±16g
- 採用沉金PCB,機器焊接工藝保證品質
- 引腳間距54mm
硬體接線:
M4G9:
MPU6050 sensor Vcc pin連接M4G9開發板CN7 pin6(+5V)
MPU6050 sensor GND pin連接M4G9開發板CN7 pin8(GND)
MPU6050 sensor SCL pin連接M4G9開發板CN8 pin3(SCL)
MPU6050 sensor SDA pin連接M4G9開發板CN8 pin5(SDA)
完成接線如下圖: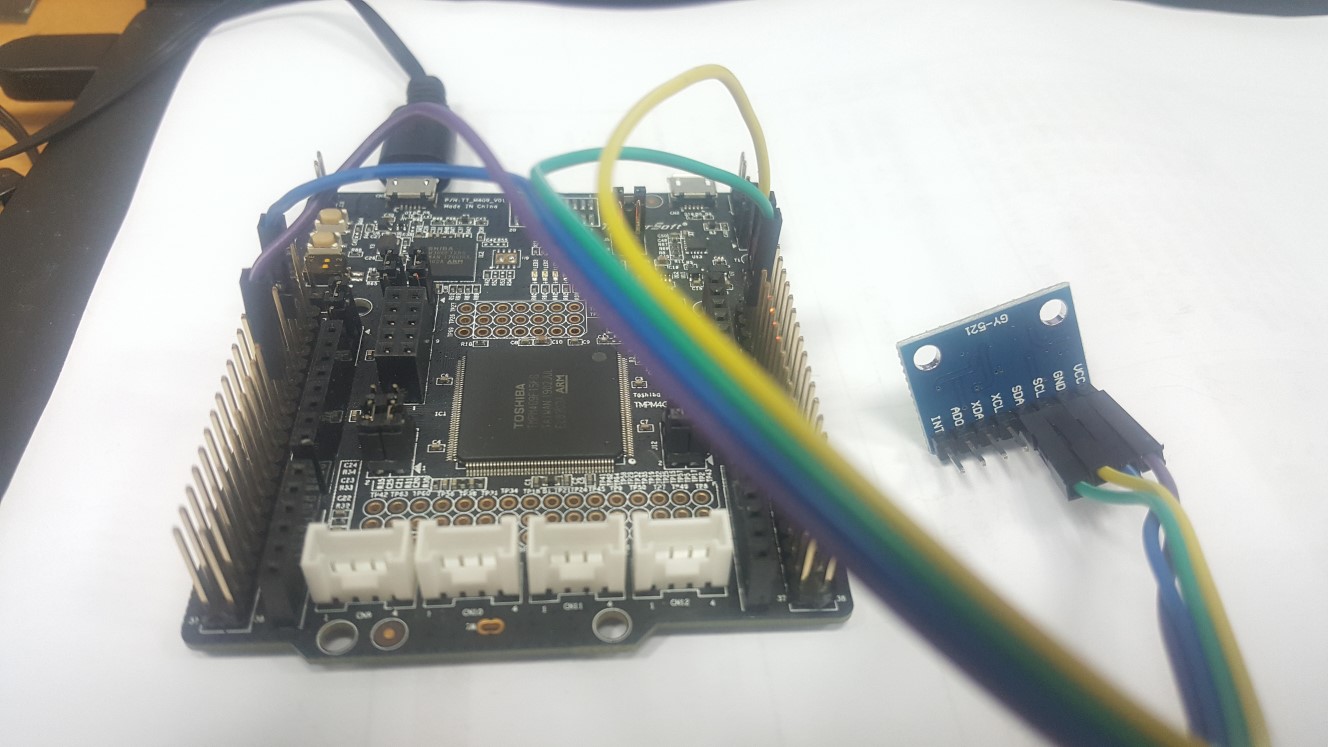
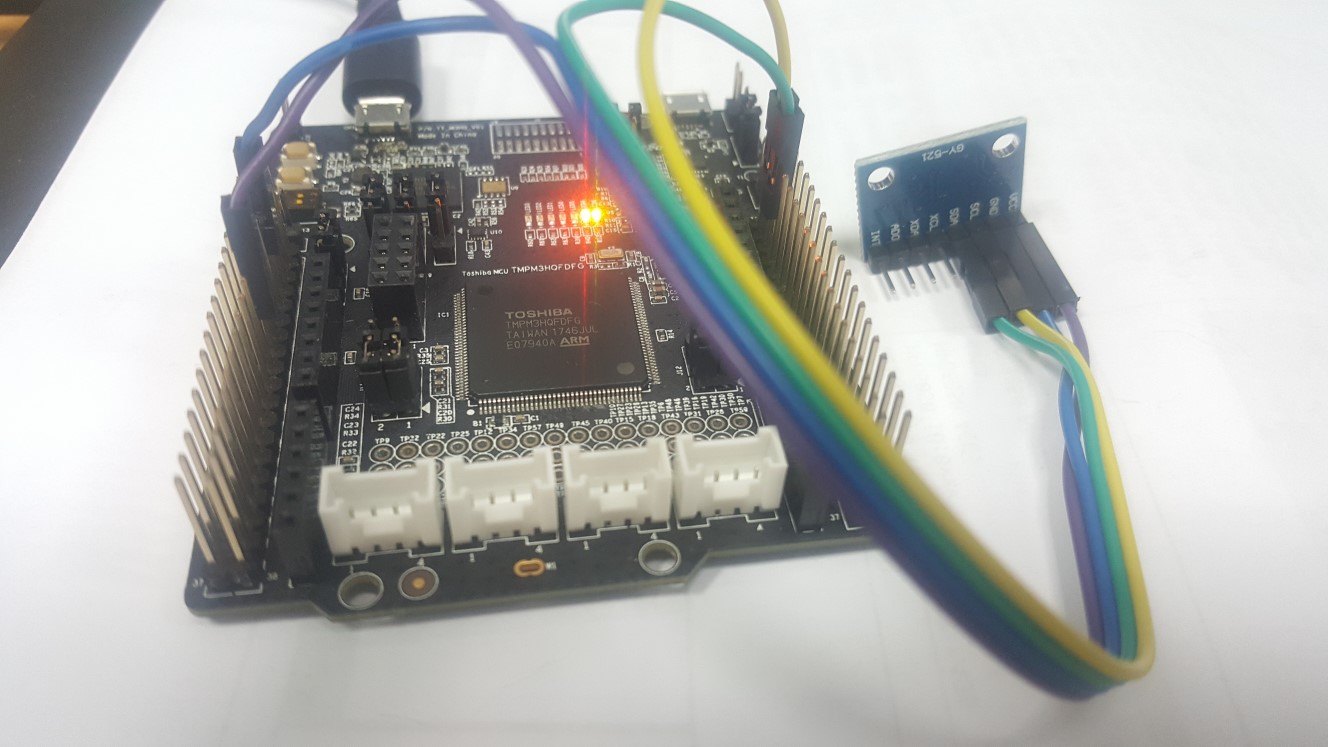
M3HQ:
MPU6050 sensor Vcc pin連接M3HQ開發板CN7 pin6(+5V)
MPU6050 sensor GND pin連接M3HQ開發板CN7 pin8(GND)
MPU6050 sensor SCL pin連接M3HQ開發板CN8 pin3(SCL)
MPU6050 sensor SDA pin連接M3HQ開發板CN8 pin5(SDA)
完成接線如下圖:
若需要使用到LCD屏幕作顯示功能,可將之前介紹過的2.8" Arduino UNO介面的LCD電阻觸摸屏直接與M4G9/M3HQ結合即可,完成硬體組裝如下圖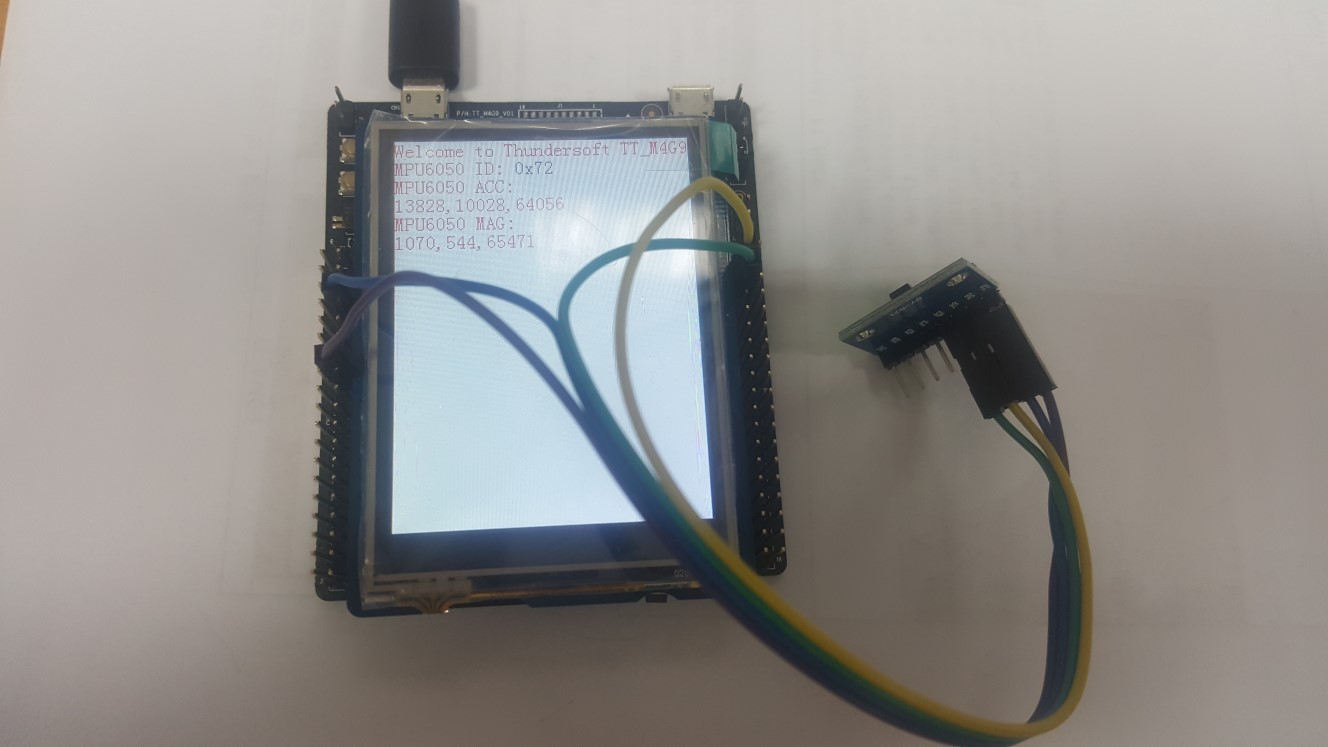
軟體演示介紹:
1.Console Mode模式:
1-1. 硬體接線完成,USB連接到PC端
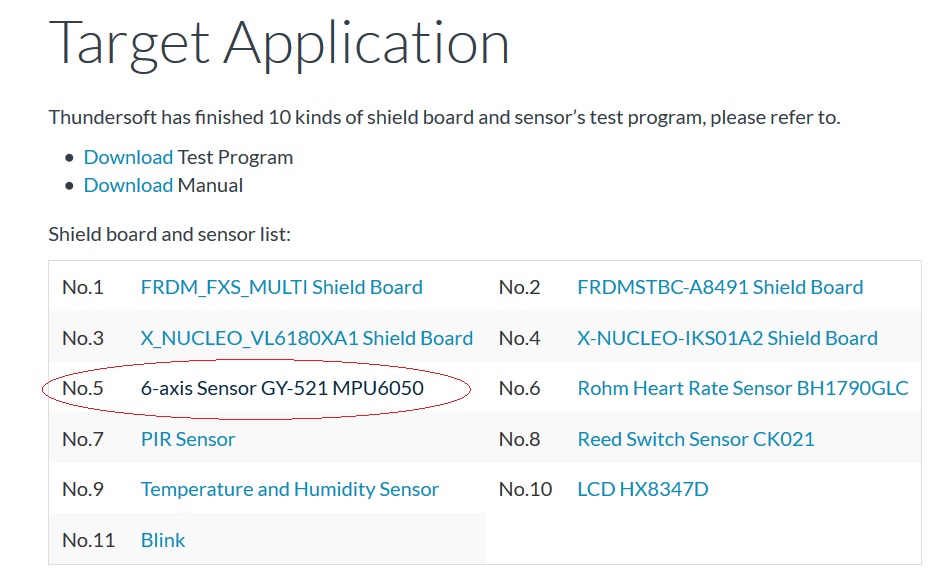
1-2. 將Mbed官網的” 6-axis Sensor GY-521 MPU6050 “專案導入Online編譯環境中
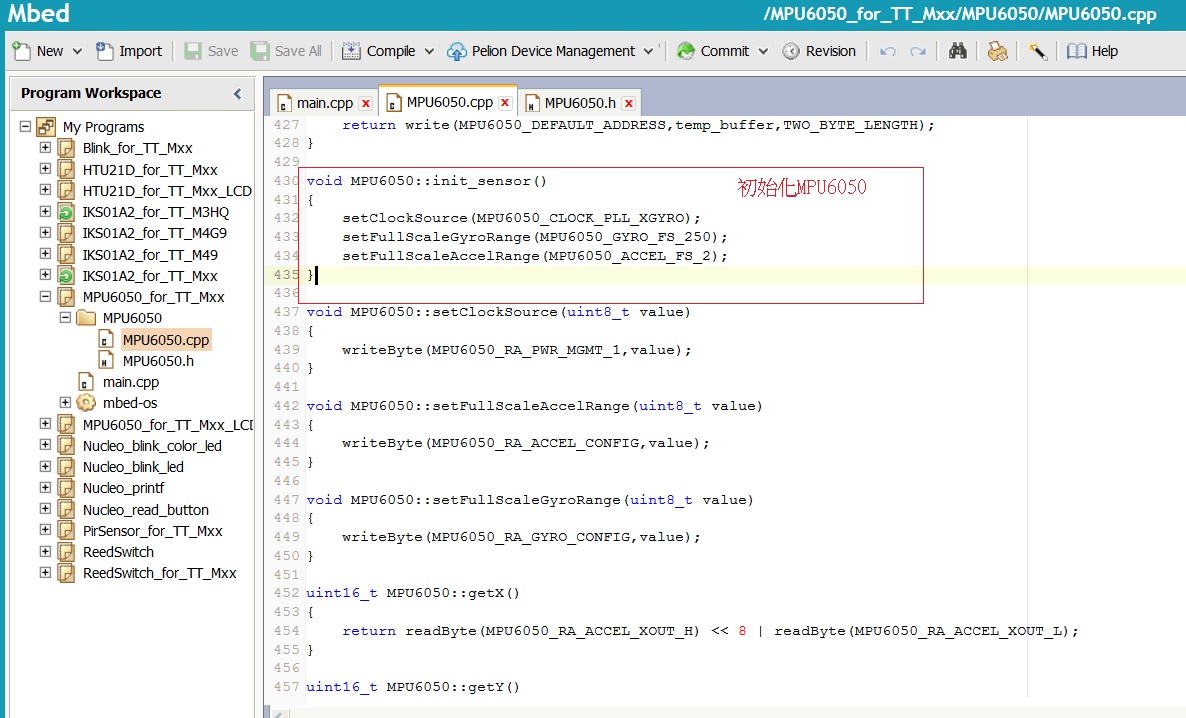
1-3.導入Mbed Online編譯環境後,可以依照需求修改或是設計需要的軟體功能,簡單介紹可以在MPU6050.cpp中使用setFullScaleAccelRange與setFullScaleGyroRange函式分別設定所需求的的偵測範圍,再使用init_sensor函式完成MPU6050的初始化(請參考下圖)
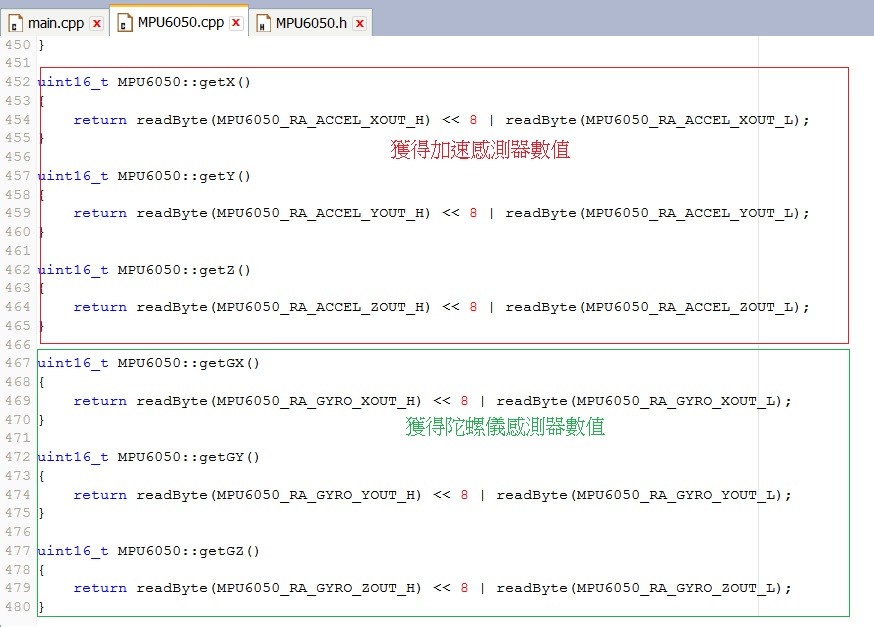
而透過下圖函式可以分別讀取加速度器與陀螺儀各三軸的數據資料
1-4.完成MPU6050 Mbed專案軟體開發後,選擇TT_M4G9/TT_M3HQ platform分別編譯完成後燒錄程式至對應EVB充新上電
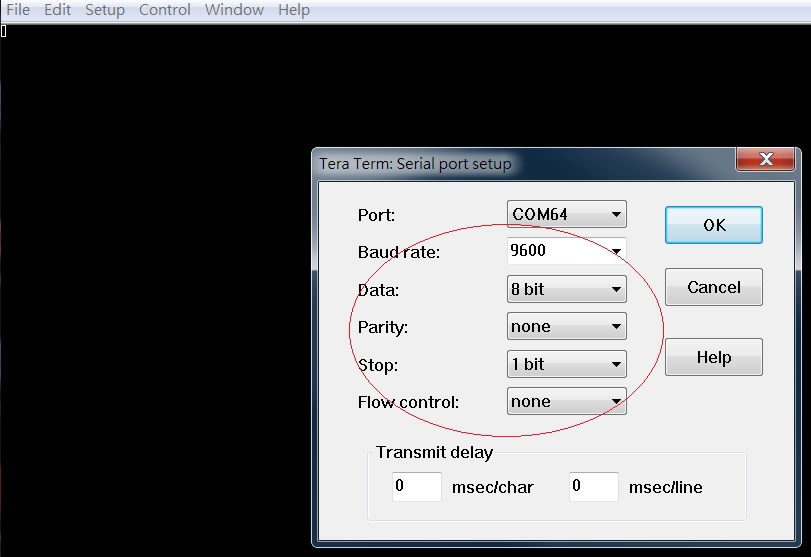
1-5. 開啟Console工具設定uart baudrate 為9600
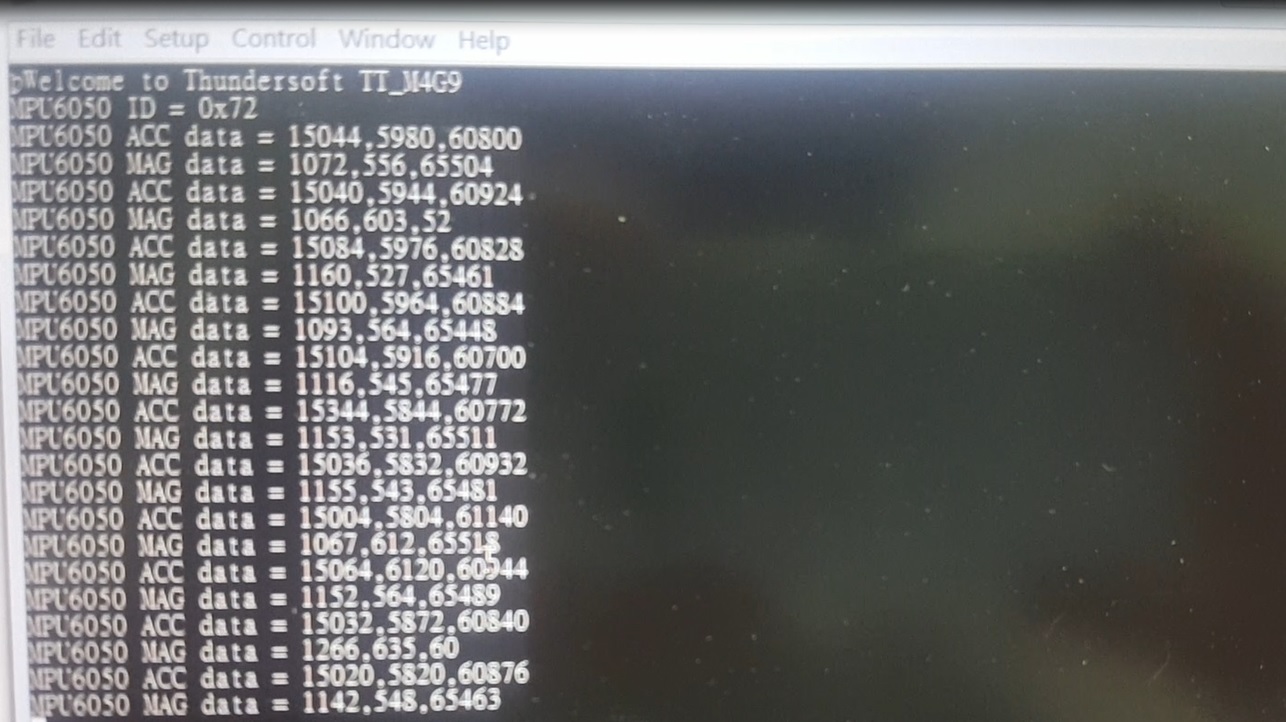
1-6. 可由uart獲得並觀察加速度器與陀螺儀數值(如下圖)
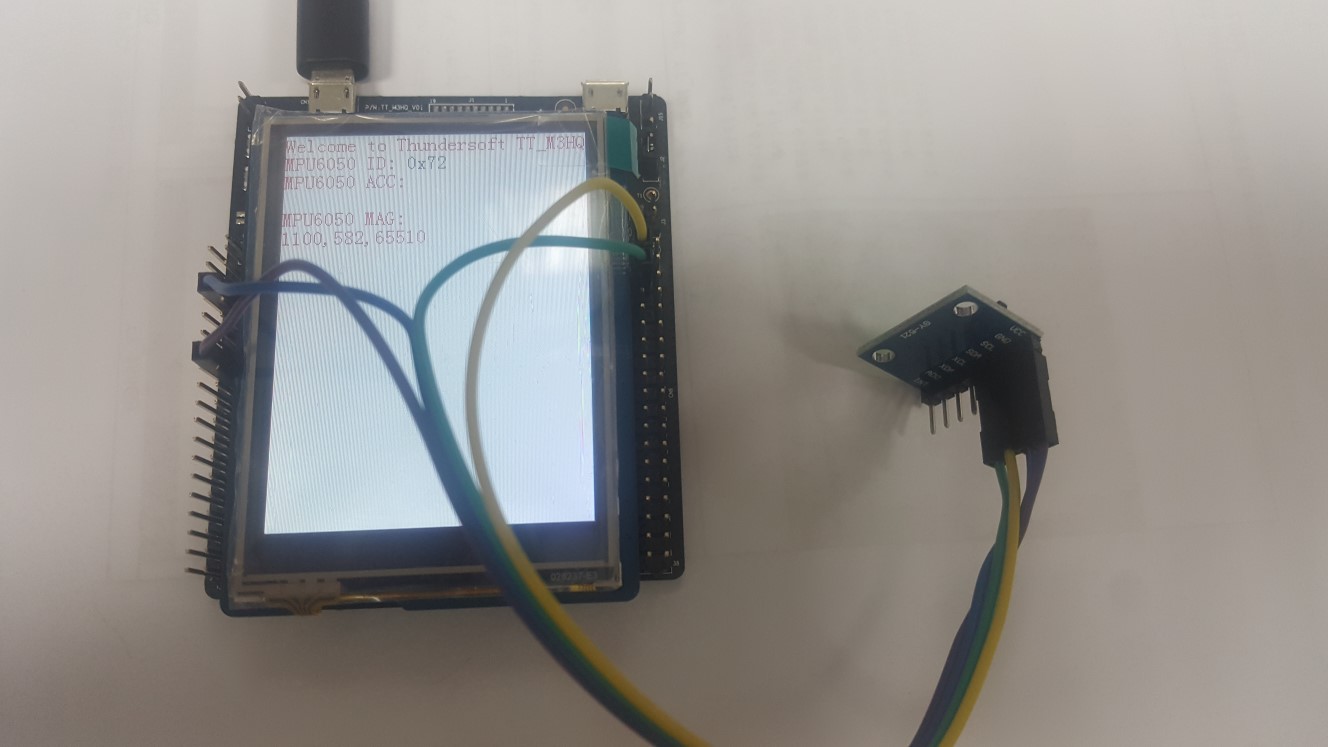
2.LCD顯示模式:
2-1. 如” Toshiba Mbed OS IKS01A2運動與環境感測器範例演示”一文說明加入Mbed LCD library後修改Mbed OS版本
2-2. 選擇TT_M4G9/TT_M3HQ platform分別編譯完成後燒錄程式至對應EVB充新上電
2-3. 可由LCD屏幕觀察加速度器與陀螺儀數據值,下方分別提供M4G9與M3HQ成功將MPU6050加速度器與陀螺儀數值顯示在LCD屏幕上的結果
依照本文軟硬體的執行流程可以讓Mbed官網Toshiab TMPM4G9與TMPM3HQ MCU的演示範例成功將MPU6050六軸感測器讀取並顯示,同時藉由此架構未來針對一些I2C介面的元件亦可增加類似MPU6050的物件進行控制,加速元件開發測試的速度。
評論