遙控器方案整體硬體設計指南
基於Actions 炬芯的ATB110x SOC BLE語音遙控器已經大批量量產,搭配 6-軸運動傳感器使其更加智能、擁有更高的市場競爭力;
PCB板按功能模塊分模擬信號部分(例如MIC IN走線)、射頻信號部分(例如BLE及相關關鍵外圍)、數字信號部分(例如TWI、UART、SPI等),電源部分(如晶片內部電源),模擬信號和射頻信號容易受到干擾,布局時儘量遠離數字信號電路和大電流電源電路。BLE的天線應遠離喇叭(以及喇叭引線)、指示燈、頻譜燈、按鍵等的排線。
數字、模擬元器件儘量遠離並限定在各自的布線區域內。元器件周圍留出電源和地走線的空間。數字元器件集中放置以減少走線長度。在IC的電源Pin放置0.1uF的去耦電容。晶振電路儘量靠近其驅動器件。
為利於系統散熱,布局時發熱量較高的器件儘量分開擺放,有EPAD的器件可以在地焊盤和器件周圍的地多打過孔,可以達到更好的散熱效果。
在設計許可的條件下,元器件的布局儘可能做到同類元器件按相同的方向排列,相同功率的模塊集中在一起布置;相同封裝的元器件等炬力放置,以便元件貼裝、焊接和檢測。
走線
RF走線
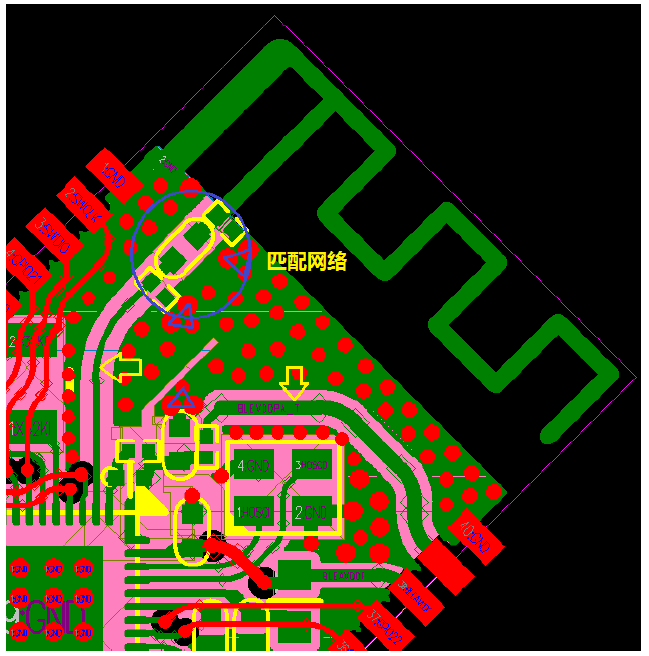
對於板載天線注意點如下:
1)板載天線面積儘量大,在匹配時帶寬會更加寬,性能更佳;
2)匹配網絡儘量靠近板載天線,如下圖所示;
3)如果面積允許情況下靠近晶片端多預留一個TT型匹配網絡,可根據情況進一步優化匹配;
4)針對兩個走線的情況,在疊層選定後需計算相關的線寬和鋪銅間距,因為板材有差異,注意和板廠溝通相關阻抗情況;
電源線:
1)根據印製線路板電流的大小,儘量加粗電源線的寬度,減少環路電阻。大電流的電源過孔推薦使用大於20-12mil的過孔,並打多個過孔連接。
2)電源線、底線的走向和數據傳遞的方向儘量保持一致,有助於增強抗噪聲能力。
地線:
1)模擬地、數字地、大功率器件的地在布線時分開,而最後都匯集到接地點上來,如:MIC會進行單獨的AGND處理再連接到GND上。
2)接地線應儘量加粗。若接地線很細,則接地電位隨電流的變化而變化,致使電子設備的信號電平不穩,抗噪聲性能變差。因此應將接地線加粗,使它通過三倍於印製板上的允許電流。
TDK擁有最豐富的麥克風產品組合、基於運動傳感器的光標控制的核心專利擁有者,適用於智能遙控器、智能電視和機頂盒的完整軟體包(空鼠、手勢、遊戲控制);
Air Motion軟體方案
嵌入式軟體:AirMotion Library (AML)

6-軸軟體運行在遙控器端
提供空中相對指向
發送dx/dy給遠端目標設備
支持基本的手勢
支持無線接口
目標CPU:8051,ARM Cortex M0,M3,M4
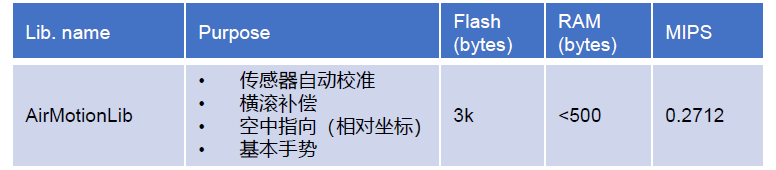
AirMotionLib固件數據
基於ARM Cortex-M3平台驗證
數據處理頻率:100Hz
基於運動的功能


算法簡介
AML算法獲取手持遙控設備內的6軸運動傳感器數據,在遙控設備端融合計算出遠端被控制焦點在兩緯平面的實時相對位置(dx, dy)。同時,為了保證良好的用戶體驗,AML算法對傳感器數據做實時動態校準,設備橫滾補償。AML算法還可以支持常用的遙控手勢識別,如左、右、上、下四方向的划動,以及順時針和逆時針方向的快速旋轉。
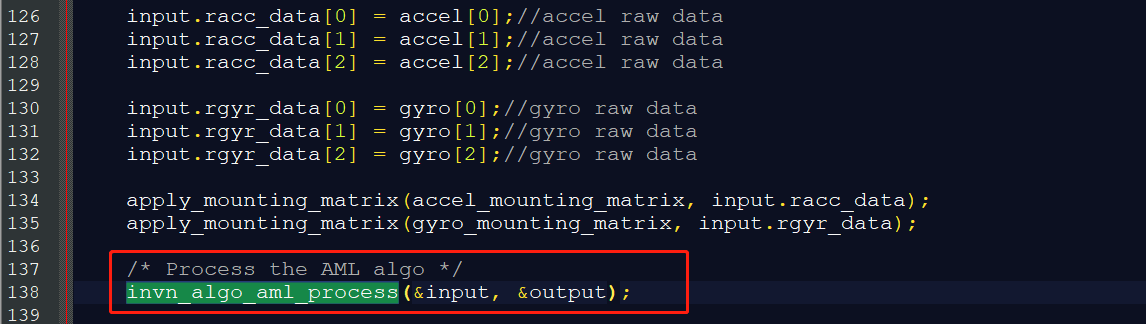
1、 API
AIR MOTION庫使用以下功能:

•invn_algo_aml_init():每次處理(重新)啟動時,必須調用此函數進行庫初始化。
2、校準
陀螺儀偏移值可能會隨著時間的推移而波動,具體取決於各種參數。
該庫支持連續校準,實時計算陀螺儀偏移值。

每次調用invn_algo_aml_process()時,都會檢查陀螺儀即時“靜態”。 如果考慮設備靜態,計算新的陀螺儀偏移值。 然後可以將遙控器視為已校準。 您可以檢查'InvnAlgoAMLOutput.status'以跟蹤校準狀態。
'gyr_fsr'參數用於校準運動算法。 'acc_fsr'參數用於滾動補償功能